本文主要是介绍摄像机畸变模型(opencv),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
摄像机畸变模型(opencv)
本人邮箱:sylvester0510@163.com,欢迎交流讨论,
欢迎转载,转载请注明网址http://blog.csdn.net/u010128736/
理想的摄像机模型是针孔模型,但是实际的镜头不符合这种假设。另外,相机的构造以及制造、安装、工艺等因素也会造成误差,导致相机通常会存在多种非线性畸变,使得上面介绍的针孔相机模型并不能准确地描述最终的成像关系。所以,为了使相机标定结果更加准确,在进行相机标定时应该将相机的非线性畸变考虑进来,修正理想投影模型。
一、径向畸变
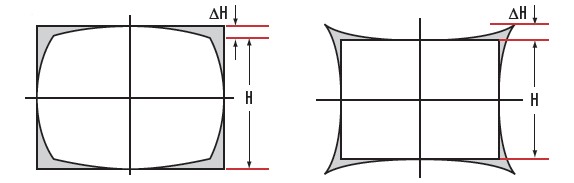
径向畸变产生的主要原因是镜头径向曲率的不规则变化,它会导致图像的扭曲变形,例如,空间中的一条直线成像到图像平面后发生弯曲,变形成一条曲线。这种畸变的特点是以主点为中心,沿径向移动,离的距离越远,产生的变形量就越大。径向畸变是导致图像畸变的主要因素。如图所示,一个矩形的严重径向失真被较正成理想线性镜头的图像。
径向畸变模型在opencv中被描述为:
xcorrected=x(1+k1r2+k2r4+k3
这篇关于摄像机畸变模型(opencv)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






