momo专题
【MOMO_Tips】批量将word转换为PDF格式
批量将word转换为PDF格式 1.打开文件–>选项–>自定义功能区–>开发工具–>确定 2.点开开发工具,选择第一个visual basic 3.进入页面后找到插入–>模块,就可以看到这样的画面之后将下列vba代码复制粘贴到模块中 Sub ConvertWordsToPdfs()'Updated by Extendoffice 20181123Dim xIndex As
【ROS2】MOMO的鱼香ROS2(四)ROS2入门篇——ROS2节点通信之话题与服务
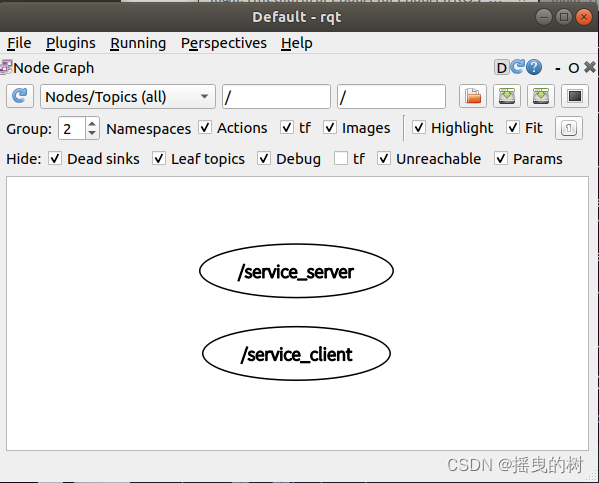
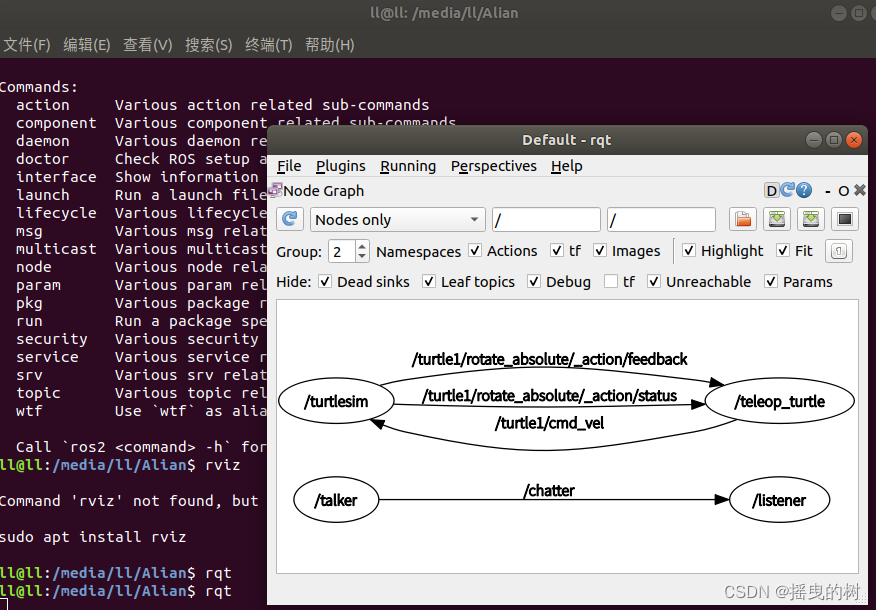
ROS2节点通信之话题与服务点 引言1 理解从通信开始1.1 TCP(传输控制协议)1.2 UDP(用户数据报协议)1.3 基于共享内存的IPC方式 2 ROS2话题2.1 ROS2话题指令2.2 话题之RCLPY实现2.2.1 编写发布者2.2 2 编写订阅者2.2.3 运行测试 3 ROS2服务3.1 ROS2服务指令3.2 服务之RCLPY实现3.2.1 编写客户端3.2 2 编写服
【ROS2】MOMO的鱼香ROS2(三)ROS2入门篇——ROS2第一个节点
ROS2第一个节点 引言1 认识ROS2节点1.1 节点之间的交互1.2 节点的命令行指令1.3 工作空间1.4 功能包1.4.1 功能包获取安装1.4.2 功能包相关的指令 ros2 pkg 2 ROS2构建工具—Colcon2.1 安装Colcon2.2 测试编译2.3 Colcon其他指令 3 使用RCLPY编写节点3.1 创建Python功能包3.2 编写程序3.3 编译运行节点
【ROS2】MOMO的鱼香ROS2(二)ROS2入门篇——ROS2初体验
ROS2初体验 引言专业术语认识1 认识ROS21.1 ROS2版本对照表1.2 ROS与ROS2对比1.3 ROS2架构1.3.1 DDS实现层1.3.2 ROS中间件接口(RMW)1.3.3 ROS2客户端库 RCL 2 安装ROS22.1 ROS安装(一键式)2.2 手动安装ROS22.2.1 添加ROS软件源2.2.2 添加公钥2.2.3 更新2.2.4 安装ros22.2.5 安

Android逆向实战过掉MoMo签名验证和反调试
大家好,我是老袁,一名逆向分析人员,现主要研究Android平台逆向;今天给大家分享一篇,如何过掉MoMo的签名验证和C++层反调试。大神勿喷。 一、使用环境及工具 1.系统:windwos 10(x64) 2.设备:Google nexus 5真机。 3.反编译工具: Android Studio 3.2 开发和调试smali代码IDA pro 7.0 分析e

海康相机+SC-AHRS-100D2 IMU + VINS-MOMO
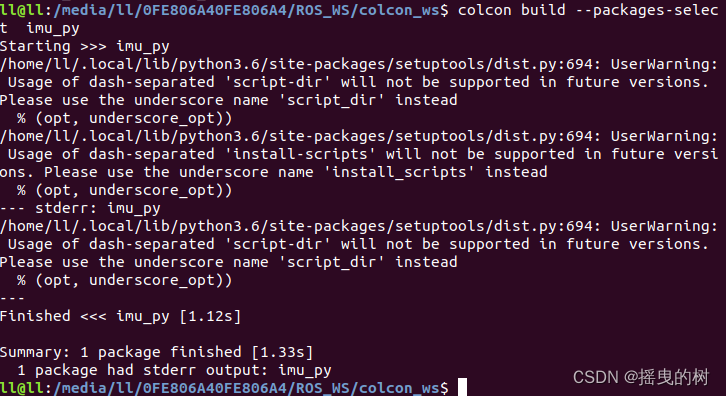
百度找IMU适配型号的功能包sanchi_amov。注意imu的坐标系。 解压功能包,编译,用sanchi_amov启动SC-AHRS-100D2(根据不同型号改参数) roslaunch sanchi_amov imu_100D2.launch 若端口打开错误,配置其权限 sudo chmod 777 /dev/ttyUSB0 IMU话题为 /imu/data_raw 将海
【android-plugins- 插件工具】java静态代码安全审计插件 -Momo Code Sec Inspector (Java)
jetbrains的Momo插件Momo Code Sec Inspector (Java) 直接在plugins市场搜索下载也可以!