本文主要是介绍【ROS2】MOMO的鱼香ROS2(二)ROS2入门篇——ROS2初体验,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
ROS2初体验
- 引言
- 专业术语认识
- 1 认识ROS2
- 1.1 ROS2版本对照表
- 1.2 ROS与ROS2对比
- 1.3 ROS2架构
- 1.3.1 DDS实现层
- 1.3.2 ROS中间件接口(RMW)
- 1.3.3 ROS2客户端库 RCL
- 2 安装ROS2
- 2.1 ROS安装(一键式)
- 2.2 手动安装ROS2
- 2.2.1 添加ROS软件源
- 2.2.2 添加公钥
- 2.2.3 更新
- 2.2.4 安装ros2
- 2.2.5 安装依赖
- 2.2.6 配置环境变量
- 2.2.7 卸载
- 2.2.8 ROS2安装路径
- 3 ROS2测试
- 3.1 listener和talker
- 3.2 小海龟
- 3.3 可视化
引言
笔者跟着鱼香ROS的ROS2学习之旅
学习参考:
【ROS2机器人入门到实战】
笔者的学习目录
- MOMO的鱼香ROS2(一)ROS2入门篇——从Ubuntu操作系统开启
专业术语认识
- DDS:Data Distribution Service (数据分发服务)。是由对象管理组 (OMG) 于 2003 年发布并于 2007 年修订的开分布式系统标准。
- GUI(Graphical User Interface)图形用户界面
- CLI(Command-Line Interface)命令行界面
- API( Application Programming Interface)应用程序编程接口
- RMW (ROS Middleware Interface)中间件接口
1 认识ROS2
ROS2是在ROS的基础上设计开发的第二代机器人操作系统,可以帮助我们简化机器人开发任务,加速机器人落地的 软件库和工具集 。
1.1 ROS2版本对照表

笔者使用的主要是针对ubuntu18.04 的eloquent和20.04的foxy
ROS2官方更新计划:http://docs.ros.org/en/humble/Releases.html
1.2 ROS与ROS2对比
ROS的不足:
ROS的设计目标是简化机器人的开发,设计了一整套通信机制(话题、服务、参数、动作)。
- 强依赖Ros Master(主节点)
- 通信基于TCP实现,实时性差、系统开销大
- 对Python3支持不友好,需要重新编译
- 消息机制不兼容
- 没有加密机制、安全性不高
ROS2的改进:
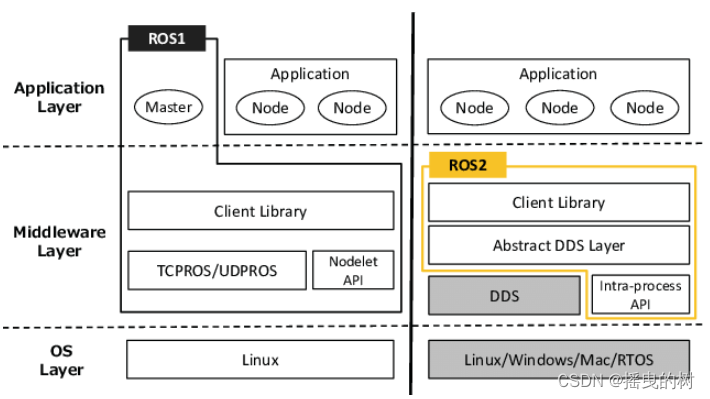
- 去中心化master 节点
- 支持多操作系统:linux、windows、mac,甚至是嵌入式RTOS
- 采用DDS通信,增强了ROS2的实时性、可靠性和连续性
- 支持pyhton3
- 编译系统的改进(catkin到ament)
- C++标准更新到c++11
- 可以使用相同 API 的进程间和进程内通信
ROS2自身只做个进程间的通信,节点和节点之间的通信采用的是DDS服务进行
1.3 ROS2架构
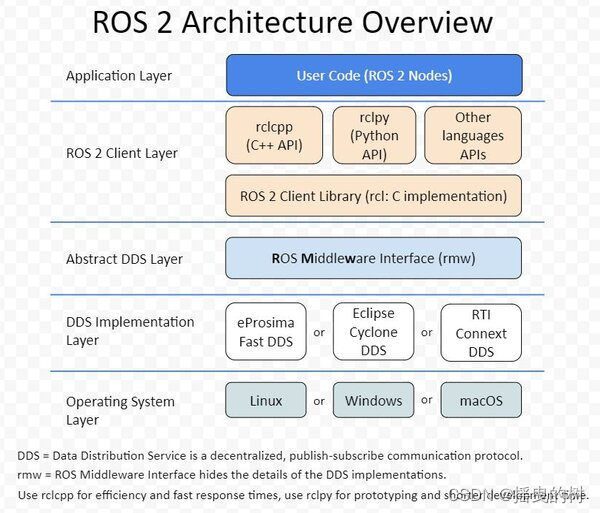
1.3.1 DDS实现层
Data Distribution Service (数据分发服务)。是由对象管理组 (OMG) 于 2003 年发布并于 2007 年修订的开分布式系统标准。
通过类似于ROS中的话题发布和订阅形式来进行通信,同时提供了丰富的服务质量管理来保证可靠性、持久性、传输设置等。
参考链接:ROS2中间件DDS架构
1.3.2 ROS中间件接口(RMW)
这一层将DDS实现层进一步的封装,使得DDS更容易使用。原因在于DDS需要大量的设置和配置(分区,主题名称,发现模式,消息创建,…),这些设置都是在ROS2的抽象层中完成的。
1.3.3 ROS2客户端库 RCL
RCL(ROS Client Library)ROS客户端库,其实就是ROS的一种API,提供了对ROS话题、服务、参数、Action等接口。
GUI(Graphical UserInterface)就是平常我们说的图形用户界面,大家用的Windows是就是可视化的,我们可以通过鼠标点击按钮等图形化交互完成任务。
CLI(Command-Line Interface)就是命令行界面了,我们所用的终端,黑框框就是命令行界面,没有图形化。
API( Application Programming Interface)应用程序编程接口。API在不同语言中的表现形式不同,在C和C++表现为头文件,在Python中表现为Python文件。
rclc可以实现多个语言的ROS2的库

2 安装ROS2
根据电脑的架构选择合适的ROS2版本
ubuntu18.04 的系统架构为[amd64:bionic]
2.1 ROS安装(一键式)
参考链接:动手安装ROS2
执行下面的命令,然后按照脚本指示文件操作即可
wget http://fishros.com/install -O fishros && . fishros
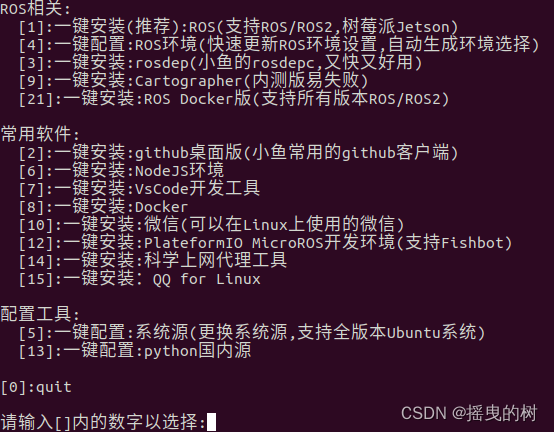
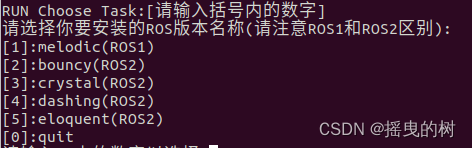
选择
[1]:一键安装(推荐):ROS(支持ROS/ROS2,树莓派Jetson)
[1]:更换系统源再继续安装
[2]:更换系统源并清理第三方源
[5]:eloquent(ROS2)
[1]:eloquent(ROS2)桌面版
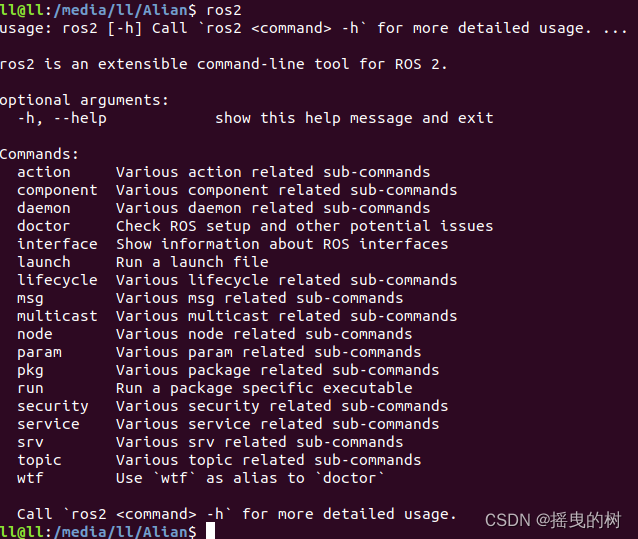
安装成功在终端输入
ros2
2.2 手动安装ROS2
直接在base环境下安装,Ctrl+Alt+T打开终端
2.2.1 添加ROS软件源
echo "deb [arch=$(dpkg --print-architecture)] https://repo.huaweicloud.com/ros2/ubuntu/ $(lsb_release -cs) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
2.2.2 添加公钥
sudo apt install curl gnupg2 -y
curl -s https://gitee.com/ohhuo/rosdistro/raw/master/ros.asc | sudo apt-key add -
2.2.3 更新
# 确保包索引是最新的
sudo apt update
2.2.4 安装ros2
sudo apt install ros-humble-desktop
2.2.5 安装依赖
sudo apt install python3-argcomplete -y
2.2.6 配置环境变量
echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc
2.2.7 卸载
# sudo apt remove ros-[版本]-*
sudo apt remove ros-eloquent-*
sudo apt autoremove
2.2.8 ROS2安装路径
cd /opt/ros/eloquent/
ls
3 ROS2测试
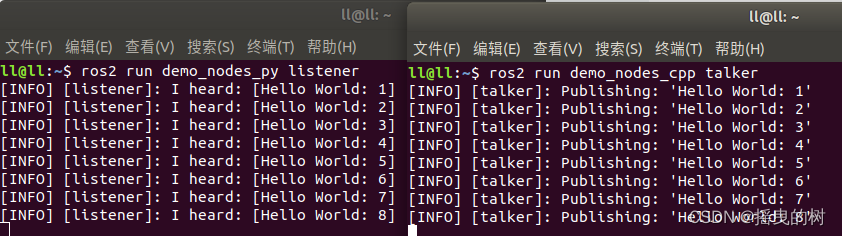
3.1 listener和talker
启动倾听者
ros2 run demo_nodes_py listener
启动说话者
ros2 run demo_nodes_cpp talker
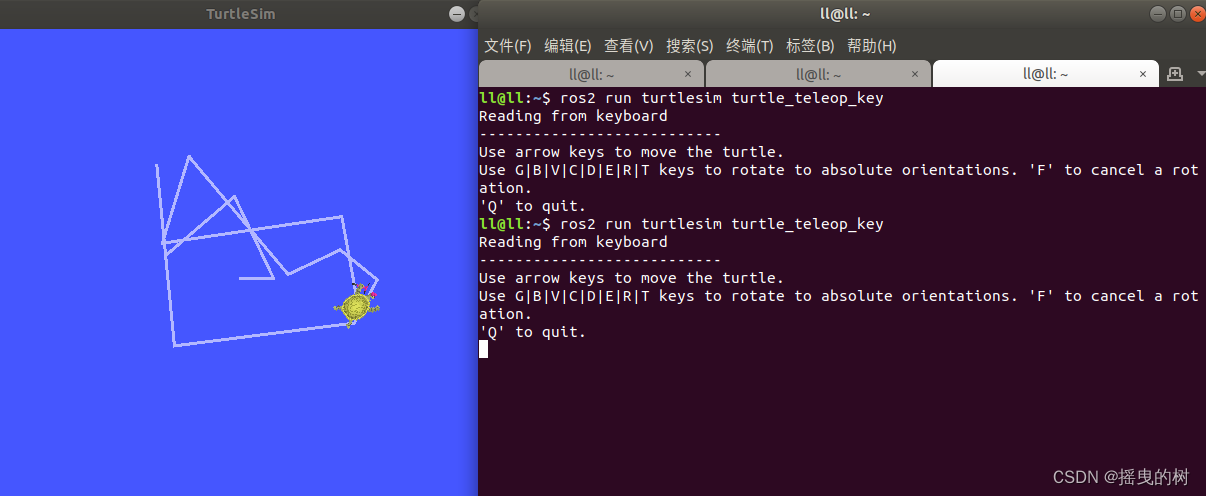
3.2 小海龟
# 终端1
ros2 run turtlesim turtlesim_node
# 终端2
ros2 run turtlesim turtle_teleop_key
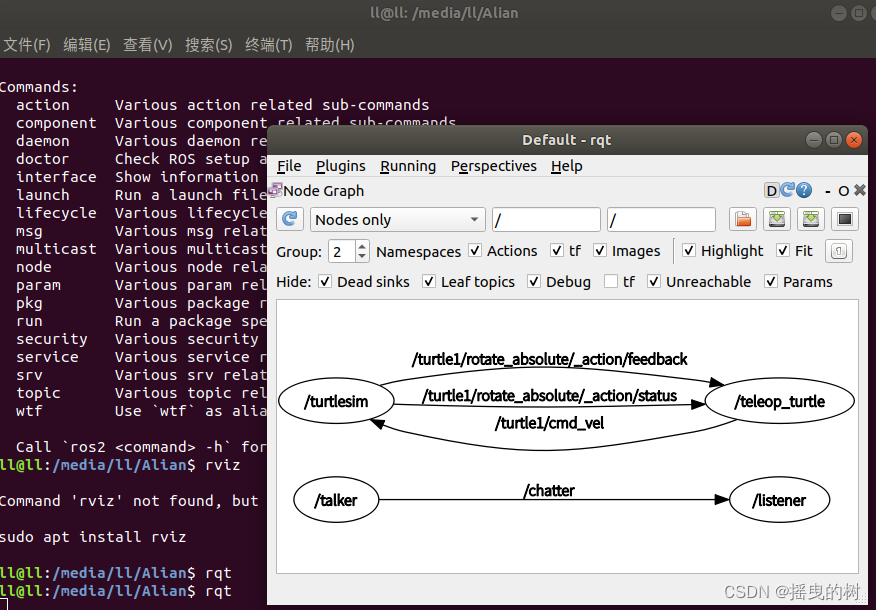
3.3 可视化
rqt
这篇关于【ROS2】MOMO的鱼香ROS2(二)ROS2入门篇——ROS2初体验的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!