本文主要是介绍ICP(迭代最近点)算法,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
图像配准是图像处理研究领域中的一个典型问题和技术难点,其目的在于比较或融合针对同一对象在不同条件下获取的图像,例如图像会来自不同的采集设备,取自不同的时间,不同的拍摄视角等等,有时也需要用到针对不同对象的图像配准问题。具体地说,对于一组图像数据集中的两幅图像,通过寻找一种空间变换把一幅图像映射到另一幅图像,使得两图中对应于空间同一位置的点一一对应起来,从而达到信息融合的目的。 一个经典的应用是场景的重建,比如说一张茶几上摆了很多杯具,用深度摄像机进行场景的扫描,通常不可能通过一次采集就将场景中的物体全部扫描完成,只能是获取场景不同角度的点云,然后将这些点云融合在一起,获得一个完整的场景。
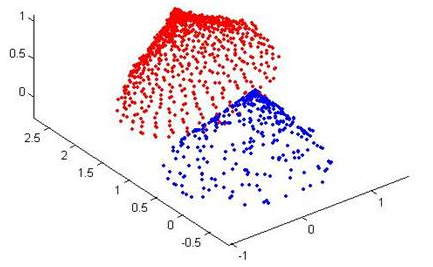
ICP(Iterative Closest Point迭代最近点)算法是一种点集对点集配准方法。如下图所示,PR(红色点云)和RB(蓝色点云)是两个点集,该算法就是计算怎么把PB平移旋转,使PB和PR尽量重叠。
用数学语言描述如下,即ICP算法的实质是基于最小二乘法的最优匹配,它重复进行“确定对应关系的点集→计算最优刚体变换”的过程,直到某个表示正确匹配的收敛准则得到满足。
ICP算法基本思想:
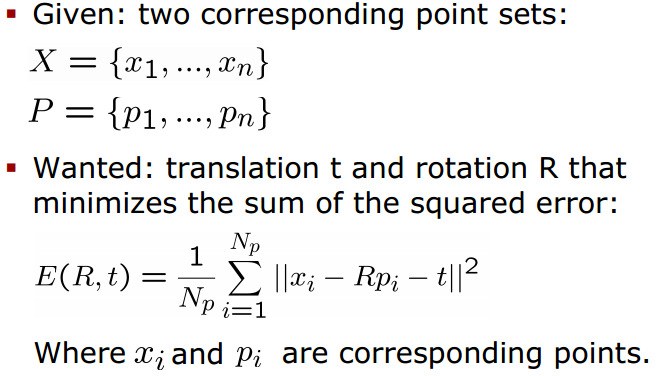
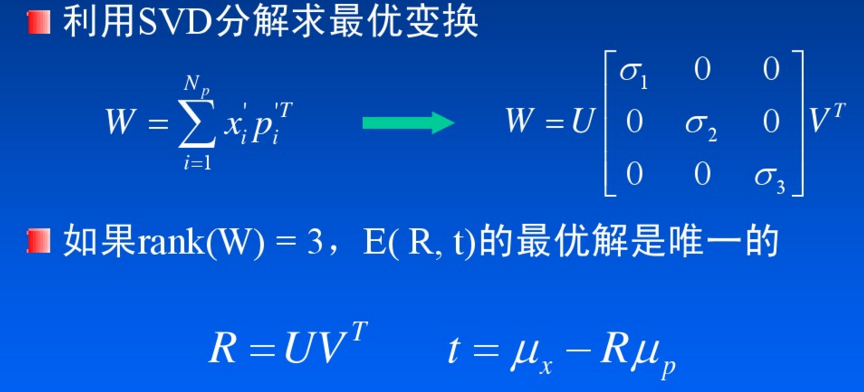
如果知道正确的点对应,那么两个点集之间的相对变换(旋转、平移)就可以求得封闭解。
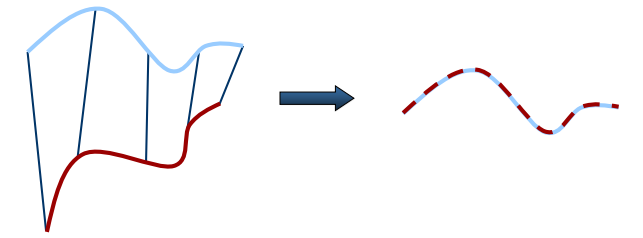
首先计算两个点集X和P的质心,分别为μx和μp

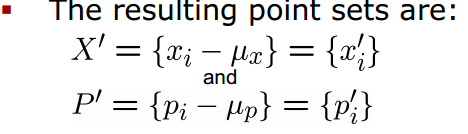
然后在两个点集中分别减去对应的质心(Subtract the corresponding center of mass from every point in the two point sets before calculating the transformation)
目标函数E(R,t)的优化是ICP算法的最后一个阶段。在求得目标函数后,采用什么样的方法来使其收敛到最小,也是一个比较重要的问题。求解方法有基于奇异值分解的方法、四元数方法等。
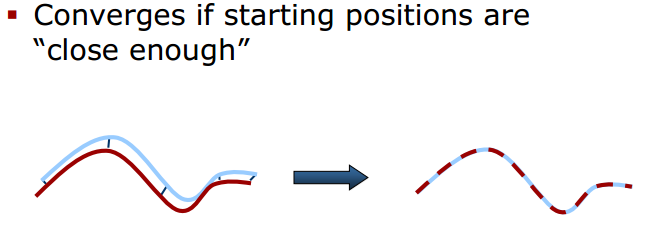
如果初始点“足够近”,可以保证收敛性
ICP算法优点:
- 可以获得非常精确的配准效果
- 不必对处理的点集进行分割和特征提取
- 在较好的初值情况下,可以得到很好的算法收敛性
ICP算法的不足之处:
- 在搜索对应点的过程中,计算量非常大,这是传统ICP算法的瓶颈
- 标准ICP算法中寻找对应点时,认为欧氏距离最近的点就是对应点。这种假设有不合理之处,会产生一定数量的错误对应点
针对标准ICP算法的不足之处,许多研究者提出ICP算法的各种改进版本,主要涉及如下所示的6个方面。

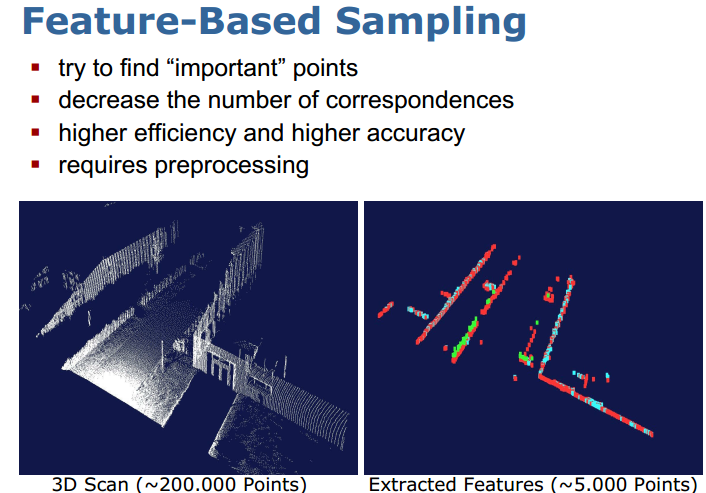
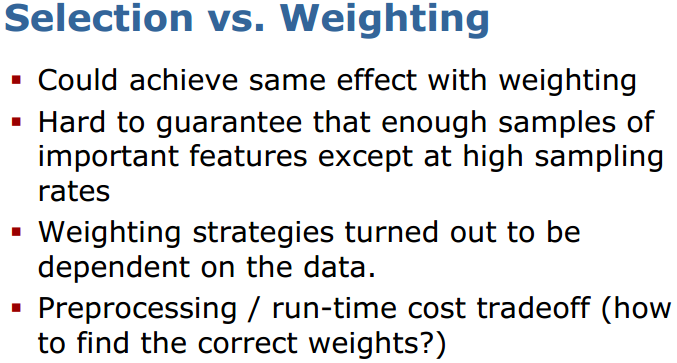
标准ICP算法中,选用点集中所有的点来计算对应点,通常用于配准的点集元素数量都是非常巨大的,通过这些点集来计算,所消耗的时间很长。在后来的研究中,提出了各种方法来选择配准元素,这些方法的主要目的都是为了减小点集元素的数目,即如何选用最少的点来表征原始点集的全部特征信息。在点集选取时可以:1.选取所有点;2.均匀采样(Uniform sub-sampling );3.随机采样(Random sampling);4.按特征采样(Feature based Sampling );5.法向空间均匀采样(Normal-space sampling),如下图所示,法向采样保证了法向上的连续性(Ensure that samples have normals distributed as uniformly as possible)

基于特征的采样使用一些具有明显特征的点集来进行配准,大量减少了对应点的数目。
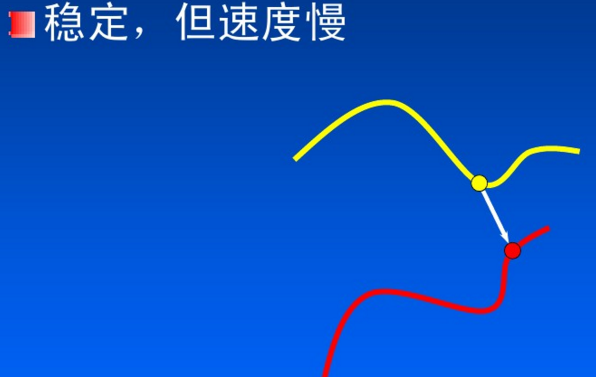
点集匹配上有:最近邻点(Closet Point)
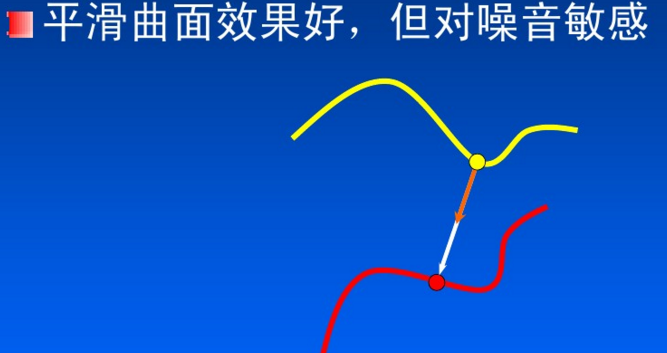
 法方向最近邻点(Normal Shooting)
法方向最近邻点(Normal Shooting)
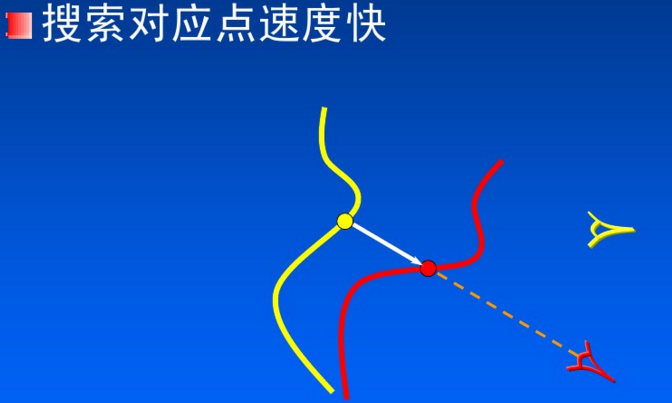
投影法(Projection)
根据之前算法的描述,下面使用Python来实现基本的ICP算法(代码参考了这里):

import numpy as npdef best_fit_transform(A, B):'''Calculates the least-squares best-fit transform between corresponding 3D points A->BInput:A: Nx3 numpy array of corresponding 3D pointsB: Nx3 numpy array of corresponding 3D pointsReturns:T: 4x4 homogeneous transformation matrixR: 3x3 rotation matrixt: 3x1 column vector'''assert len(A) == len(B)# translate points to their centroidscentroid_A = np.mean(A, axis=0)centroid_B = np.mean(B, axis=0)AA = A - centroid_ABB = B - centroid_B# rotation matrixW = np.dot(BB.T, AA)U, s, VT = np.linalg.svd(W)R = np.dot(U, VT)# special reflection caseif np.linalg.det(R) < 0:VT[2,:] *= -1R = np.dot(U, VT)# translationt = centroid_B.T - np.dot(R,centroid_A.T)# homogeneous transformationT = np.identity(4)T[0:3, 0:3] = RT[0:3, 3] = treturn T, R, tdef nearest_neighbor(src, dst):'''Find the nearest (Euclidean) neighbor in dst for each point in srcInput:src: Nx3 array of pointsdst: Nx3 array of pointsOutput:distances: Euclidean distances (errors) of the nearest neighborindecies: dst indecies of the nearest neighbor'''indecies = np.zeros(src.shape[0], dtype=np.int)distances = np.zeros(src.shape[0])for i, s in enumerate(src):min_dist = np.inffor j, d in enumerate(dst):dist = np.linalg.norm(s-d)if dist < min_dist:min_dist = distindecies[i] = jdistances[i] = dist return distances, indeciesdef icp(A, B, init_pose=None, max_iterations=50, tolerance=0.001):'''The Iterative Closest Point methodInput:A: Nx3 numpy array of source 3D pointsB: Nx3 numpy array of destination 3D pointinit_pose: 4x4 homogeneous transformationmax_iterations: exit algorithm after max_iterationstolerance: convergence criteriaOutput:T: final homogeneous transformationdistances: Euclidean distances (errors) of the nearest neighbor'''# make points homogeneous, copy them so as to maintain the originalssrc = np.ones((4,A.shape[0]))dst = np.ones((4,B.shape[0]))src[0:3,:] = np.copy(A.T)dst[0:3,:] = np.copy(B.T)# apply the initial pose estimationif init_pose is not None:src = np.dot(init_pose, src)prev_error = 0for i in range(max_iterations):# find the nearest neighbours between the current source and destination pointsdistances, indices = nearest_neighbor(src[0:3,:].T, dst[0:3,:].T)# compute the transformation between the current source and nearest destination pointsT,_,_ = best_fit_transform(src[0:3,:].T, dst[0:3,indices].T)# update the current source# refer to "Introduction to Robotics" Chapter2 P28. Spatial description and transformationssrc = np.dot(T, src)# check errormean_error = np.sum(distances) / distances.sizeif abs(prev_error-mean_error) < tolerance:breakprev_error = mean_error# calculcate final tranformationT,_,_ = best_fit_transform(A, src[0:3,:].T)return T, distancesif __name__ == "__main__":A = np.random.randint(0,101,(20,3)) # 20 points for testrotz = lambda theta: np.array([[np.cos(theta),-np.sin(theta),0],[np.sin(theta),np.cos(theta),0],[0,0,1]])trans = np.array([2.12,-0.2,1.3])B = A.dot(rotz(np.pi/4).T) + transT, distances = icp(A, B)np.set_printoptions(precision=3,suppress=True)print T
上面代码创建一个源点集A(在0-100的整数范围内随机生成20个3维数据点),然后将A绕Z轴旋转45°并沿XYZ轴分别移动一小段距离,得到点集B。结果如下,可以看出ICP算法正确的计算出了变换矩阵。

需要注意几点:
1.首先需要明确公式里的变换是T(P→X), 即通过旋转和平移把点集P变换到X。我们这里求的变换是T(A→B),要搞清楚对应关系。
2.本例只用了20个点进行测试,ICP算法在求最近邻点的过程中需要计算20×20次距离并比较大小。如果点的数目巨大,那算法的效率将非常低。
3.两个点集的初始相对位置对算法的收敛性有一定影响,最好在“足够近”的条件下进行ICP配准。
参考:
Iterative Closest Point (ICP) and other matching algorithms
http://www.mrpt.org/Iterative_Closest_Point_%28ICP%29_and_other_matching_algorithms
PCL学习笔记二:Registration (ICP算法)
http://www.voidcn.com/blog/u010696366/article/p-3712120.html
https://github.com/ClayFlannigan/icp/blob/master/icp.py
ICP迭代最近点算法综述
http://wenku.baidu.com/link?url=iJJoFALkKpgMl7ilivLCM3teN5yn60TKt5uWM6hIZejYPob8Rcy1R4Tm_2ZyX_DvX_Su9XBFCfPc4TqHioU0Gb93jKbhoj-TQ70vfn4VEJC
这篇关于ICP(迭代最近点)算法的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







