本文主要是介绍UNP(卷2:进程间通信)—— 第5章:Posix消息队列,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Posix消息队列 和 System V 消息队列的主要差别:
- 对POSIX消息队列的读总是返回最高优先级的最早消息,对System V消息队列的读则可以返回任意指定优先级的消息。
- 当往一个空队列放置一个消息时,Posix消息队列允许产生一个信号或启动一个线程,System V消息队列则不提供类似的机制。
队列中的每个消息都具有如下属性:
- 一个无符号整数优先级(Posix),或 一个长整数类型(System V);
- 消息的数据部分长度(可以为0)
- 数据本身(如果长度大于0)
mq_open、mq_close、mq_unlink
#include <fcntl.h> /* For O_* constants */
#include <sys/stat.h> /* For mode constants */
#include <mqueue.h>mqd_t mq_open(const char *name, int oflag);
mqd_t mq_open(const char *name, int oflag, mode_t mode, struct mq_attr *attr);// 返回:成功则为消息队列描述符,出错为-1
在创建一个新队列时,mode和attr参数是需要的。如果attr为NULL,就使用默认属性。
#include <mqueue.h>int mq_close(mqd_t mqdes);int mq_unlink(const char *name);// 返回:成功则为0,出错则为-1
要从系统中删除,必须调用mq_unlink
描述符的打开,有一个引用计数器,当一个消息队列的计数仍大于0时,其name就能删除,但是该队列的析构要到最后一个mq_close发生时才进行。
例子:
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <fcntl.h>
#include <sys/stat.h>
#include <mqueue.h>
#include <errno.h>#define FILE_MODE (S_IRUSR | S_IWUSR | S_IRGRP | S_IROTH)int main(int argc, char **argv)
{printf("argc = %d\n", argc);int c, flags;mqd_t mqd;flags = O_RDWR | O_CREAT | O_EXCL;while ( (c = getopt(argc, argv, "e")) != -1 ) {switch (c) {case 'e':flags |= O_EXCL;break;}}if (optind != argc - 1) {printf("usage: mqcreate [-e] <name>\n");return -1;}mqd = mq_open(argv[optind], flags, FILE_MODE, NULL);if (mqd == -1) {printf("mq_open failed!---[errno = %d]\n", errno);return -1;}mq_close(mqd);exit(0);
}
$ ./mqcreate /1234.mq
一直不清楚参数name的要求,通过查看man mq_overview得知:
Each message queue is identified by a name of the form /somename;
所以像 /tmp/1234.mq 是不正确的。
生成的消息队列文件在/dev/mqueue/目录下。
mq_getattr、mq_setattr
#include <mqueue.h>int mq_getattr(mqd_t mqdes, struct mq_attr *attr);int mq_setattr(mqd_t mqdes, const struct mq_attr *newattr, struct mq_attr *oldattr);// 返回:成功则为0,出错则为-1
struct mq_attr {long mq_flags; /* Flags: 0 or O_NONBLOCK */long mq_maxmsg; /* Max number of messages allowed on queue */long mq_msgsize; /* Max size of message (bytes) */long mq_curmsgs; /* number of messages currently in queue */
};调用mq_setattr,只设置或清楚非阻塞标志。mq_maxmsg和mq_msgsize只能在创建队列时设置。mq_curmsgs只能获取,不能设置。
若oldattr非空,则先前的属性将返回到该结构体中。
mq_send、mq_receive
往队列中放置一个消息,从队列中取走一个消息。
每个消息有一个优先级,它是小于MQ_PRIO_MAX的无符号整数。Posix要求这个上限至少为32。
mq_receive总是返回所指定队列中最高优先级的最早消息,而且该优先级能随该消息的内容及其长度一同返回。
#include <mqueue.h>int mq_send(mqd_t mqdes, const char *msg_ptr, size_t msg_len, unsigned int msg_prio);// 返回:若成功则为0,出错为-1
ssize_t mq_receive(mqd_t mqdes, char *msg_ptr, size_t msg_len, unsigned int *msg_prio);// 返回:若成功则为消息中字节数,出错为-1#include <time.h>
#include <mqueue.h>int mq_timedsend(mqd_t mqdes, const char *msg_ptr, size_t msg_len, unsigned int msg_prio, const struct timespec *abs_timeout);
ssize_t mq_timedreceive(mqd_t mqdes, char *msg_ptr, size_t msg_len, unsigned int *msg_prio, const struct timespec *abs_timeout);mq_send的prio参数是待发送消息的优先级。其值必须小于MQ_PRIO_MAX。
消息队列限制:
mq_maxmsg
mq_msgsize
MQ_OPEN_MAX:一个进程能够同时拥有打开着消息队列的最大数目。(Posix要求至少为8)
MQ_PRIO_MAX:任意消息的最大优先级值加1(Posix要求至少为32)
mq_notify
#include <mqueue.h>int mq_notify(mqd_t mqdes, const struct sigevent *sevp);// 返回:若成功则为0,出错则为-1
- 产生一个信号;
- 创建一个线程来执行一个指定的函数。
这种通知通过调用mq_notify建立。该函数为指定队列建议或删除异步事件通知。
union sigval {int sival_int; /* Integer signal value. */void *sival_ptr; /* Pointer signal value. */
};struct sigevent {int sigev_notify; /* Notification type. */int sigev_signo; /* Signal number. */union sigval sigev_value; /* Signal value. */void (*sigev_notify_function)(union sigval); /* Notification function. */pthread_attr_t *sigev_notify_attributes; /* Notification attributes. */
};

没有列在该表中的函数不可以从信号处理程序中调用。
POSIX实时信号
信号可划分为两个大组:
0、其值在SIGRTMIN和SIGRTMAX之间(包括两者在内)的实时信号。POSIX要求至少提供RTSIG_MAX种实时信号,而该常值的最小值为8.
1、所有其他信号:SIGALRM、SIGINT、SIGKILL等等。
当接收到某个信号的进程其sigaction调用中是否指定了新的SA_SIGINFO标志,会造成以下的差异:
0、SA_SIGINFO指定时:SIGRTMIN到SIGRTMAX信号的实时行为有保证 而所有其他信号的行为没有保证
1、SA_SIGINFO没有指定时所有信号的实时行为都没有保证。
就这种情况来看,若需要实时行为,我们就得使用SIGRTMIN和SIGRTMAX之间的新的实时信号,而且在安装信号处理程序时必须给sigaction指定SA_SIGINFO标志。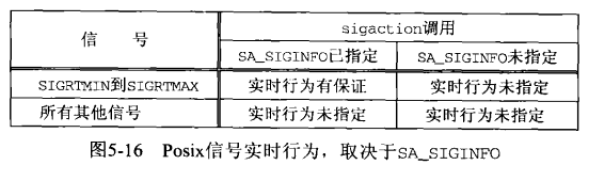
术语实时行为(realtime behavior)隐含着如下特征:
0、信号是排队的。也即是说若同一信号产生了三次,它就递交三次。另外,一种给定信号的多次发生以先进先出(FIFO)顺序排队。对于不排队的信号来说,产生了三次的某种信号可能只递交一次。
1、当有多种SIGRTMIN到SIGRTMAX范围内的解阻塞信号排队时,值较小的信号先于值较大的信号递交 。即是说:SIGRTMIN比值为SIGRTMIN+1的信号“更为优先”。
2、当某个非实时信号递交时,传递给它的信号处理程序的唯一参数是该信号的值。实时信号比其他信号传递更多的信息。
可以通过设置 SA_SIGINFO标志安装的任意实时信号的信号处理程序声明如下:
typedef struct { int si_signo; /* Signal number.*/int si_code; /* Signal code. */int si_errno; /* If non-zero, an errno value associated with this signal, as described in <errno.h>. */pid_t si_pid; /* Sending process ID. */uid_t si_uid; /* Real user ID of sending process. */void *si_addr; /* Address of faulting instruction. */int si_status; /* Exit value or signal. */long si_band; /* Band event for SIGPOLL. *、union sigval si_value; /* Signal value. */
} siginfo_t;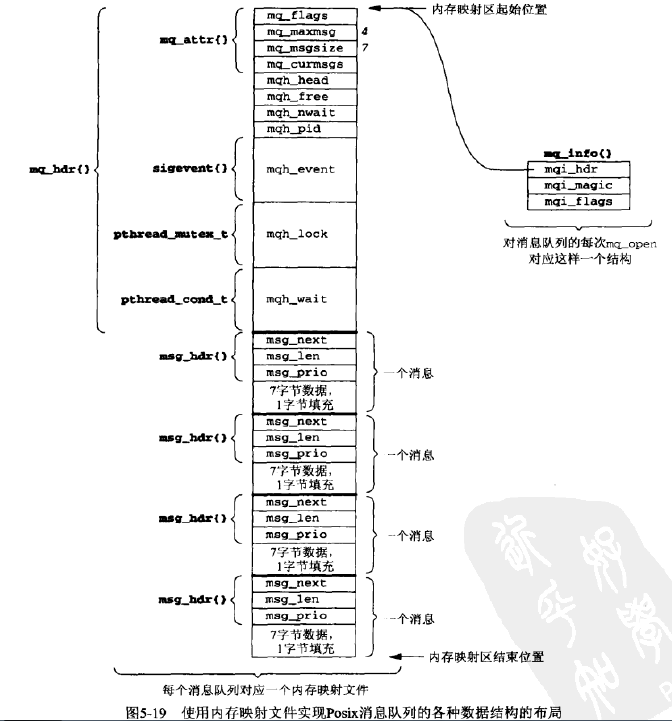
这篇关于UNP(卷2:进程间通信)—— 第5章:Posix消息队列的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








