本文主要是介绍基于jupyter notebook的python编程-----通过python编程实现通信系统的多径仿真,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
基于jupyter notebook的python编程-----通过python编程实现通信系统的多径仿真目录
- 一、多径衰落信道简介
- 1、多径衰落信道
- 2、多径衰落信道特点
- 3、多径衰落信道原理
- 二、python的多径衰落信道模拟
- 1、在 r 0 r_0 r0处的信道特点
- 2、修改移动台距离基站的位置,让 r 0 = 9 r_0=9 r0=9
- 3、修改发射频率 f = 1 0 8 且 r 0 = 3 f=10^8且r_0=3 f=108且r0=3
- 4、让移动台以速度v=1向反射墙运动
- 5、分离出移动台接收的合成信号
- 三、多径仿真结论
- 1、多径仿真结论
- 2、多径扩展
- 四、Matlab多径仿真完整代码
- 1、matlab多径源码如下
对于通信传输,多径传输一直以来都是重要且难点的内容,不仅需要考虑多径衰落带来的影响,还需要考虑怎么在模拟中完成多径的搭建模拟,本次博客,林君学长主要带大家了解,如何通过python代码实现通信系统的多径仿真
一、多径衰落信道简介
1、多径衰落信道
在无线信道中,发送和接收天线之间通常存在多于一条的信号传播路径。多径的存在是因为发射机和接收机之间建筑物和其他物体的反射、绕射、散射等引起的。当信号在无线信道传播时,多径反射和衰减的变化将使信号经历随机波动。因此,无线信道的特性是不确定的、随机变化的。
2、多径衰落信道特点
- 频率选择性衰落
- 时间选择性衰落
3、多径衰落信道原理
本次博客,通过一个简单的模拟程序来说明多径衰落信道的特点,然后再给出多径衰落信道的仿真方法。
1)、首先,先说一下程序模拟多径信道的场景,如图4-15所示
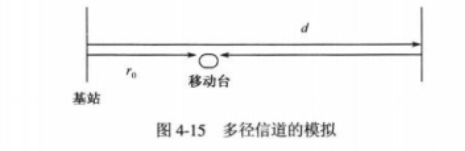
假设在一条笔直的高速公路上,一端安装了一个固定的基站,在另一端有一面完全反射电磁波的墙面,基站距反射墙的距离为d,移动台距基站初始距离为 r 0 r_0 r0。基站发射一个频率为f的正弦信号,表示为 c o s ( 2 π f t ) cos(2\pi ft) cos(2πft),由于墙面的反射,移动台可以接收到2径信号,其中之一是从基站直接发射的信号,另一径是从反射墙反射过来的信号。
2)、首先来看移动台静止的情况。显然,从基站发出的直射信号到达移动台需要的时间为 r 0 / c r_0/c r0/c (c为光速),从反射墙反射过来的信号到达移动台所需要的时间为 ( 2 d − r 0 ) / c (2d-r_0)/c (2d−r0)/c。换句话说,在时
刻t,移动台分别接收到了从时刻 t − r 0 / c t-r_0/c t−r0/c 基站发出的直射信号和从时刻 t − ( ( 2 d − r 0 ) / c ) t-((2d-r_0)/c) t−((2d−r0)/c) 基站发出的反射信号。
3)、信号在传播的过程中要衰减,自由空间中,电磁波功率随距离r按平方规律衰减,相应的电场强度(接收信号电压)随 1 / r 1/r 1/r 规律衰减并且反射信号同直射信号的相位相反。所以,时刻t移动台接收到的合成信号为

式中,减号体现了反射信号与直射信号的相位相反
接下来,我们就通过python代码来实现上面的原理吧!
二、python的多径衰落信道模拟
1、在 r 0 r_0 r0处的信道特点
1)、python代码如下所示:
#r0=3
import numpy as np
from numpy import random
import matplotlib.pyplot as plt
plt.rcParams['font.sans-serif']=['SimHei'] #显示中文标签
plt.rcParams['axes.unicode_minus']=False
f=1 #发射信号频率
v=0 #移动台速度,静止时刻为0
c=3e8 #电磁波速度,光速
r0=3 #移动台距离基站的初始距离
d=10 #基站距离反射墙的距离
t1=np.array([]) #时间
for i in np.arange(0.1,10+0.0001,0.0001):t1=np.insert(t1,len(t1),i)
E1=np.cos(2*np.pi*f*((1-v/c)*t1-r0/c))/(r0+v*t1) #直射径信号
E2=np.cos(2*np.pi*f*((1+v/c)*t1+(r0-2*d)/c))/(2*d-r0-v*t1) #反射径信号
plt.plot(t1,E1,t1,E2,'-g',t1,E1-E2,'-r') #画出直射径信号、反射径信号、移动台接收的合成信号
plt.legend(["直射径信号","反射径信号","移动台接收的合成信号"],loc='upper left')
plt.axis([0,10,-0.8,0.8]) #设置横纵比
plt.show()
2)、模拟结果

3)、结论
上图可以清楚地看出,即使移动台是静止的,由于反射径的存在,使得接收到的合成信号最大值要小于直射径的信号.
2、修改移动台距离基站的位置,让 r 0 = 9 r_0=9 r0=9
1)、python代码如下所示:
#r0=9
f=1 #发射信号频率
v=0 #移动台速度,静止时刻为0
c=3e8 #电磁波速度,光速
r0=9 #移动台距离基站的初始距离
d=10 #基站距离反射墙的距离
t1=np.array([]) #时间
for i in np.arange(0.1,10+0.0001,0.0001):t1=np.insert(t1,len(t1),i)
E1=np.cos(2*np.pi*f*((1-v/c)*t1-r0/c))/(r0+v*t1) #直射径信号
E2=np.cos(2*np.pi*f*((1+v/c)*t1+(r0-2*d)/c))/(2*d-r0-v*t1) #反射径信号
plt.plot(t1,E1,t1,E2,'-g',t1,E1-E2,'-r') #画出直射径信号、反射径信号、移动台接收的合成信号
plt.legend(["直射径信号","反射径信号","移动台接收的合成信号"],loc='upper left')
plt.axis([0,10,-0.8,0.8]) #设置横纵比
plt.show()
2)、模拟结果

3)、结论
从图中可以看出,这次由于靠近反射墙的位置,直射信号要比 r 0 = 3 r _0=3 r0=3处弱-一些,反射信号要比 r 0 = 3 r_0=3 r0=3位置处的信号强一些,但移动台接收到的合成信号更弱了,不仅要小于直射径的信号更小于反射径的信号
3、修改发射频率 f = 1 0 8 且 r 0 = 3 f=10^8且r_0=3 f=108且r0=3
以上是发射频率f=1的情况,发射其他频率的信号结果会怎样呢?修改 f = 1 0 8 f=10^8 f=108并且 r 0 = 3 r_0=3 r0=3
1)、python代码如下所示:
#f=10的8次方,r0=3
f=1e8 #发射信号频率
v=0 #移动台速度,静止时刻为0
c=3e8 #电磁波速度,光速
r0=3 #移动台距离基站的初始距离
d=10 #基站距离反射墙的距离
t1=np.array([]) #时间
for i in np.arange(0.1,10+0.0001,0.0001):t1=np.insert(t1,len(t1),i)
E1=np.cos(2*np.pi*f*((1-v/c)*t1-r0/c))/(r0+v*t1) #直射径信号
E2=np.cos(2*np.pi*f*((1+v/c)*t1+(r0-2*d)/c))/(2*d-r0-v*t1) #反射径信号
plt.plot(t1,E1,t1,E2,'-g',t1,E1-E2,'-r') #画出直射径信号、反射径信号、移动台接收的合成信号
plt.legend(["直射径信号","反射径信号","移动台接收的合成信号"],loc='upper left')
plt.axis([0,10,-0.8,0.8]) #设置横纵比
plt.show()
2)、模拟结果

3)、结论
我们会发现,此时移动台接收到的信号得到了增强;至此,可以得出结论,在同一位置, 由于反射径信号的存在,发射不同频率的信号时,在接收机处接收到信号有的频率是被增强了,有的频率是被削弱了。频率选择性衰落由此产生。
4)、扩展
既然有频率选择性衰落,自然会问,哪些频率会被增强,哪些频率会被削弱呢?在上面的例子中,如果f=1, 2, 3,.100, … 1000, 会发现这些频率基本,上都是被削弱的,只有让f充分大,如f=10", 才会看出信号被增强了,那么就把那些受到影响基本一致的频率范围称为相干带宽。
4、让移动台以速度v=1向反射墙运动
使 f = 2 , v = 1 , r 0 = 3 , d = 15 , t 1 = 0.1 : 12 : 0.001 f=2 ,v=1,r0=3,d=15,t1=0.1:12:0.001 f=2,v=1,r0=3,d=15,t1=0.1:12:0.001
1)、上面讨论 了移动台静止的情况。现在让移动台向反射墙运动,速度为v,则在时刻t,移动台距离基站的位置r=r+vt。把最开始式中的 r 0 r_0 r0用r代替得:

2)、那么通过python代码模拟如下:
#f=2,v=1,r0=3,d=15,t1=0.1:12:0.001
f=2 #发射信号频率
v=1 #移动台速度,静止时刻为0
c=3e8 #电磁波速度,光速
r0=3 #移动台距离基站的初始距离
d=15 #基站距离反射墙的距离
t1=np.array([]) #时间
for i in np.arange(0.1,12+0.001,0.001):t1=np.insert(t1,len(t1),i)
E1=np.cos(2*np.pi*f*((1-v/c)*t1-r0/c))/(r0+v*t1) #直射径信号
E2=np.cos(2*np.pi*f*((1+v/c)*t1+(r0-2*d)/c))/(2*d-r0-v*t1) #反射径信号
plt.plot(t1,E1,t1,E2,'-g',t1,E1-E2,'-r') #画出直射径信号、反射径信号、移动台接收的合成信号
plt.legend(["直射径信号","反射径信号","移动台接收的合成信号"],loc='upper left')
plt.axis([0,12,-0.5,0.5]) #设置横纵比
plt.show()
3)、模拟结果:

5、分离出移动台接收的合成信号
1)、分离接收合成信号python代码如下所示:
#f=2,v=1,r0=3,t1=0.1:12:0.001时候单独画接收信号
f=2 #发射信号频率
v=1 #移动台速度,静止时刻为0
c=3e8 #电磁波速度,光速
r0=3 #移动台距离基站的初始距离
d=15 #基站距离反射墙的距离
t1=np.array([]) #时间
for i in np.arange(0.1,12+0.001,0.001):t1=np.insert(t1,len(t1),i)
E1=np.cos(2*np.pi*f*((1-v/c)*t1-r0/c))/(r0+v*t1) #直射径信号
E2=np.cos(2*np.pi*f*((1+v/c)*t1+(r0-2*d)/c))/(2*d-r0-v*t1) #反射径信号
plt.plot(t1,E1-E2,'-r') #移动台接收的合成信号
plt.legend(["移动台接收的合成信号"],loc='upper left')
plt.axis([0,12,-0.5,0.5]) #设置横纵比
plt.show()
2)、分离结果:

3)、结论
从前面的程序中可知多径导致了频率选择性。当移动台运动起来后,发现即使同一频率,在不同的时间点,合成信号的强度也是不一样的。
三、多径仿真结论
1、多径仿真结论
1)、在数字通信中,接收端是周期性的对接收符号进行判决从而恢复信息的,1个符号脉冲的周期可大可小,因此,根据相干时间与符号脉冲周期的相对长短,可以把信道分为慢变信道和快变信道。在上面第二张图中,如果发送符号的周期小于1.25s,就可以认为这是慢变信道(或者准静态信道)
2)、无线信道大体可以分为4种:慢变瑞利衰落信道、快变瑞利衰落信道、慢变频率选择性信道、快变频率选择性信道。

2、多径扩展
1)、如果信道没有频率选择性,则最大的时延扩展Tmax要远远小于符号周期T(Tmax <<T,),在这种情况下,所有的延迟多径分量到达的时段仅为一个符号时间的一小部分。 在这种情况下,信道可以用单一路径来建模,输入/输出关系可以表示为乘法,即:

四、Matlab多径仿真完整代码
林君学长同时在这里给出Matlab的多径仿真的一部分代码,其他可通过以下代码改写
1、matlab多径源码如下
clear all
f=1; %发射信号频率
v=0; %移动台速度,静止时刻为0
c=3e8; %电磁波速度,光速
r0=3; %移动台距离基站的初始距离
d=10; %基站距离反射墙的距离
t1=0.1:0.0001:10; %时间
E1=cos(2*pi*f*((1-v/c).*t1-r0/c))./(r0+v.*t1); %直射径信号
E2=cos(2*pi*f*((1+v/c)*t1+(r0-2*d)/c))./(2*d-r0-v*t1); %反射径信号
figure
plot(t1,E1,t1,E2,'-g',t1,E1-E2,'-r') %移动台接收的合成信号
legend('直射径信号','反射径信号','移动台接收的合成信号')
axis([0 10 -0.8 0.8]) %设置横纵比
以上就是本次博客的全部内容啦,通过本次博客,大家可以更好的了解到通信系统多径仿真原理,同时,林君学长也希望大家能够深入的了解多径衰落应该如何降低到最低,适合我们信号传输的那个点,理解原理;代码有错误的地方记得给林君学长留言改正。
遇到问题的小伙伴也记得评论区留言,林君学长看到会给大家回复解答的,这个学长不太冷!
陈一月的又一天编程岁月^ _ ^
这篇关于基于jupyter notebook的python编程-----通过python编程实现通信系统的多径仿真的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



