本文主要是介绍【Week-P2】CNN彩色图片分类-CIFAR10数据集,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 一、环境配置
- 二、准备数据
- 三、搭建网络结构
- 四、开始训练
- 五、查看训练结果
- 六、总结
- 3.1 ⭐ `torch.nn.Conv2d()`详解
- 3.2 ⭐ `torch.nn.Linear()`详解
- 3.3 ⭐`torch.nn.MaxPool2d()`详解
- 3.4 ⭐ 关于卷积层、池化层的计算
- 4.2.1 `optimizer.zero_grad()`说明
- 4.2.2 `loss.backward()`说明
- 4.2.3 `optimizer.step()`说明
- 4.4.1 `model.train()`说明
- 4.4.2 `model.eval()`说明
本文采用CIFAR10数据集,通过简单CNN来实现彩色图片识别。
- 🍨 本文为🔗365天深度学习训练营 中的学习记录博客
- 🍖 原作者:K同学啊 | 接辅导、项目定制
一、环境配置
# 1. 设置环境
import sys
from datetime import datetimeimport torch
import torch.nn as nn
import matplotlib.pyplot as plt
import torchvisionprint("---------------------1.配置环境------------------")
print("Start time: ", datetime.today())
print("Pytorch version: " + torch.__version__)
print("Python version: " + sys.version)device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
device

二、准备数据
导入数据的方式和【Week P1】中的方法是一致的,都是通过dataset下载数据集、通过dataloader加载数据集。
'''
2. 导入数据使用dataset下载CIFAR10数据集,并划分好训练集与测试集使用dataloader加载数据,并设置好基本的batch_size
'''
print("---------------------2.1 下载CIFAR10数据集,并划分训练集和测试集------------------")
train_ds = torchvision.datasets.CIFAR10('data', train=True, transform=torchvision.transforms.ToTensor(), # 将数据类型转化为Tensordownload=True)test_ds = torchvision.datasets.CIFAR10('data', train=False, transform=torchvision.transforms.ToTensor(), # 将数据类型转化为Tensordownload=True)print("---------------------2.2 设置batch_size------------------")
batch_size = 32train_dl = torch.utils.data.DataLoader(train_ds, batch_size=batch_size, shuffle=True)test_dl = torch.utils.data.DataLoader(test_ds, batch_size=batch_size)print("---------------------2.2.1 取一个批次查看数据格式------------------")
# 取一个批次查看数据格式
# 数据的shape为:[batch_size, channel, height, weight]
# 其中batch_size为自己设定,channel,height和weight分别是图片的通道数,高度和宽度。
imgs, labels = next(iter(train_dl))
imgs.shapeprint("---------------------2.3 数据可视化------------------")
import numpy as np# 指定图片大小,图像大小为20宽、5高的绘图(单位为英寸inch)
plt.figure(figsize=(20, 5))
for i, imgs in enumerate(imgs[:20]):# 维度缩减npimg = imgs.numpy().transpose((1, 2, 0))# 将整个figure分成2行10列,绘制第i+1个子图。plt.subplot(2, 10, i+1)plt.imshow(npimg, cmap=plt.cm.binary)plt.axis('off')#plt.show() 如果你使用的是Pycharm编译器,请加上这行代码
等待漫长的4h35min后:

三、搭建网络结构
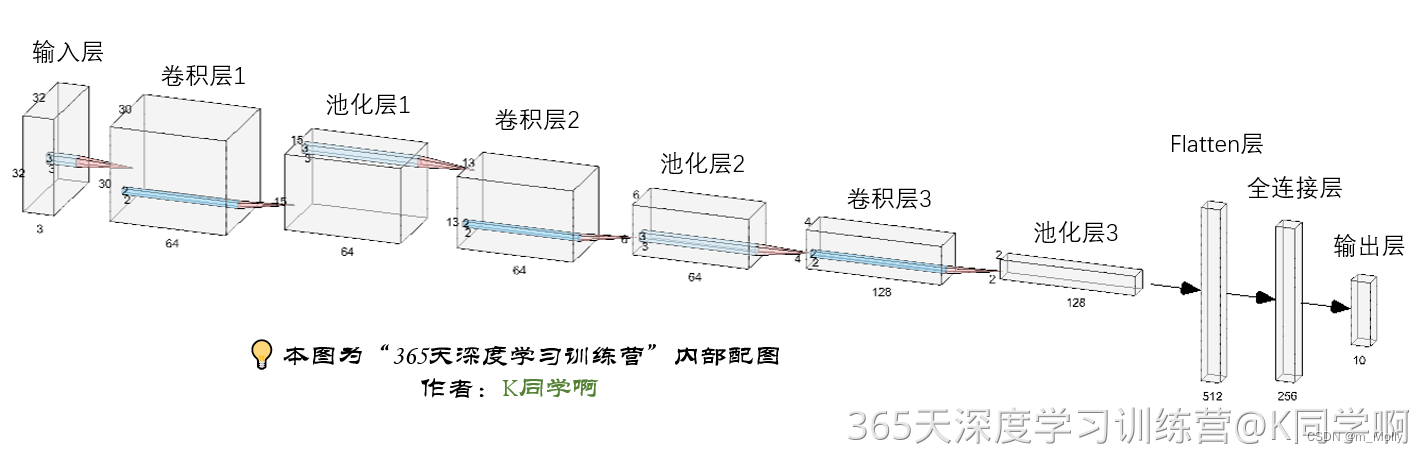
对于一般的CNN网络来说,都是由特征提取网络和分类网络构成,其中特征提取网络用于提取图片的特征,分类网络用于将图片进行分类。
用到的运算主要有:卷积、池化。
网络结构:
以下几点涉及到的内容,统一在文末说明:
3.1 ⭐torch.nn.Conv2d()详解
3.2 ⭐torch.nn.Linear()详解
3.3 ⭐torch.nn.MaxPool2d()详解
3.4 ⭐ 关于卷积层、池化层的计算
print("---------------------3.1 定义简单CNN网络,要点:卷积和池化运算------------------")
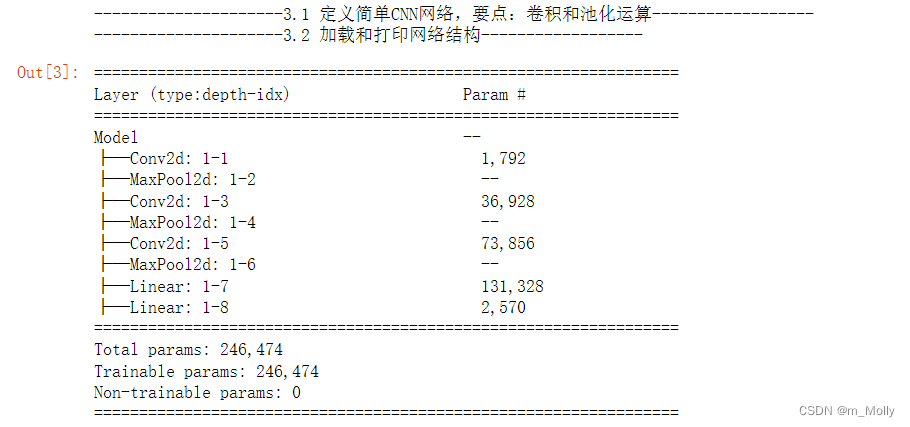
import torch.nn.functional as Fnum_classes = 10 # 图片的类别数class Model(nn.Module):def __init__(self):super().__init__()# 特征提取网络self.conv1 = nn.Conv2d(3, 64, kernel_size=3) # 第一层卷积,卷积核大小为3*3self.pool1 = nn.MaxPool2d(kernel_size=2) # 设置池化层,池化核大小为2*2self.conv2 = nn.Conv2d(64, 64, kernel_size=3) # 第二层卷积,卷积核大小为3*3 self.pool2 = nn.MaxPool2d(kernel_size=2) self.conv3 = nn.Conv2d(64, 128, kernel_size=3) # 第二层卷积,卷积核大小为3*3 self.pool3 = nn.MaxPool2d(kernel_size=2) # 分类网络self.fc1 = nn.Linear(512, 256) self.fc2 = nn.Linear(256, num_classes)# 前向传播def forward(self, x):x = self.pool1(F.relu(self.conv1(x))) x = self.pool2(F.relu(self.conv2(x)))x = self.pool3(F.relu(self.conv3(x)))x = torch.flatten(x, start_dim=1)x = F.relu(self.fc1(x))x = self.fc2(x)return xprint("---------------------3.2 加载和打印网络结构------------------")
from torchinfo import summary
# 将模型转移到GPU中(我们模型运行均在GPU中进行)
model = Model().to(device)summary(model)
四、开始训练
4.2 编写训练函数中,用到的函数有:
optimizer.zero_grad()loss.backward()optimizer.step()在文末说明每个函数的使用方法
4.3 编写测试函数中:
- 测试函数和训练函数大致相同,但是由于不进行梯度下降对网络权重进行更新,所以不需要传入优化器
4.4 正式训练中,使用的训练方法包括:
model.train():作用是启用 Batch Normalization 和 Dropoutmodel.eval():作用是不启用 Batch Normalization 和 Dropout
# 4. 训练模型
print("---------------------4.1 设置超参数------------------")
loss_fn = nn.CrossEntropyLoss() # 创建损失函数
learn_rate = 1e-2 # 学习率
opt = torch.optim.SGD(model.parameters(),lr=learn_rate)print("---------------------4.2 编写训练函数-----------------")
# 训练循环
# 训练循环
def train(dataloader, model, loss_fn, optimizer):size = len(dataloader.dataset) # 训练集的大小,一共60000张图片num_batches = len(dataloader) # 批次数目,1875(60000/32)train_loss, train_acc = 0, 0 # 初始化训练损失和正确率for X, y in dataloader: # 获取图片及其标签X, y = X.to(device), y.to(device)# 计算预测误差pred = model(X) # 网络输出loss = loss_fn(pred, y) # 计算网络输出和真实值之间的差距,targets为真实值,计算二者差值即为损失# 反向传播optimizer.zero_grad() # grad属性归零loss.backward() # 反向传播optimizer.step() # 每一步自动更新# 记录acc与losstrain_acc += (pred.argmax(1) == y).type(torch.float).sum().item()train_loss += loss.item()train_acc /= sizetrain_loss /= num_batchesreturn train_acc, train_lossprint("---------------------4.3 编写测试函数-----------------")
def test (dataloader, model, loss_fn):size = len(dataloader.dataset) # 测试集的大小,一共10000张图片num_batches = len(dataloader) # 批次数目,313(10000/32=312.5,向上取整)test_loss, test_acc = 0, 0# 当不进行训练时,停止梯度更新,节省计算内存消耗with torch.no_grad():for imgs, target in dataloader:imgs, target = imgs.to(device), target.to(device)# 计算losstarget_pred = model(imgs)loss = loss_fn(target_pred, target)test_loss += loss.item()test_acc += (target_pred.argmax(1) == target).type(torch.float).sum().item()test_acc /= sizetest_loss /= num_batchesreturn test_acc, test_lossprint("---------------------4.4 正式训练-----------------")
epochs = 10
train_loss = []
train_acc = []
test_loss = []
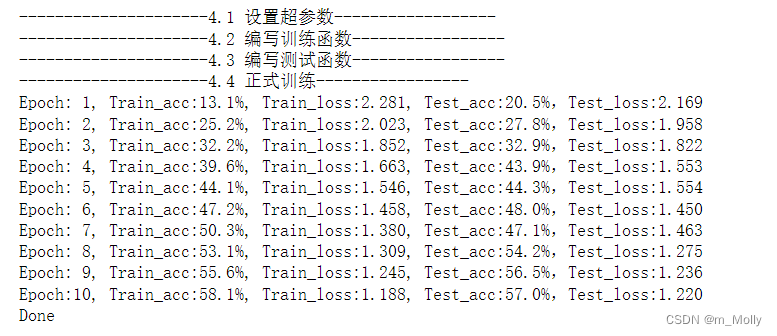
test_acc = []for epoch in range(epochs):model.train()epoch_train_acc, epoch_train_loss = train(train_dl, model, loss_fn, opt)model.eval()epoch_test_acc, epoch_test_loss = test(test_dl, model, loss_fn)train_acc.append(epoch_train_acc)train_loss.append(epoch_train_loss)test_acc.append(epoch_test_acc)test_loss.append(epoch_test_loss)template = ('Epoch:{:2d}, Train_acc:{:.1f}%, Train_loss:{:.3f}, Test_acc:{:.1f}%,Test_loss:{:.3f}')print(template.format(epoch+1, epoch_train_acc*100, epoch_train_loss, epoch_test_acc*100, epoch_test_loss))
print('Done')
五、查看训练结果
print("---------------------5. 查看训练结果-----------------")
import matplotlib.pyplot as plt
#隐藏警告
import warnings
warnings.filterwarnings("ignore") #忽略警告信息
plt.rcParams['font.sans-serif'] = ['SimHei'] # 用来正常显示中文标签
plt.rcParams['axes.unicode_minus'] = False # 用来正常显示负号
plt.rcParams['figure.dpi'] = 100 #分辨率epochs_range = range(epochs)plt.figure(figsize=(12, 3))
plt.subplot(1, 2, 1)plt.plot(epochs_range, train_acc, label='Training Accuracy')
plt.plot(epochs_range, test_acc, label='Test Accuracy')
plt.legend(loc='lower right')
plt.title('Training and Validation Accuracy')plt.subplot(1, 2, 2)
plt.plot(epochs_range, train_loss, label='Training Loss')
plt.plot(epochs_range, test_loss, label='Test Loss')
plt.legend(loc='upper right')
plt.title('Training and Validation Loss')
plt.show()
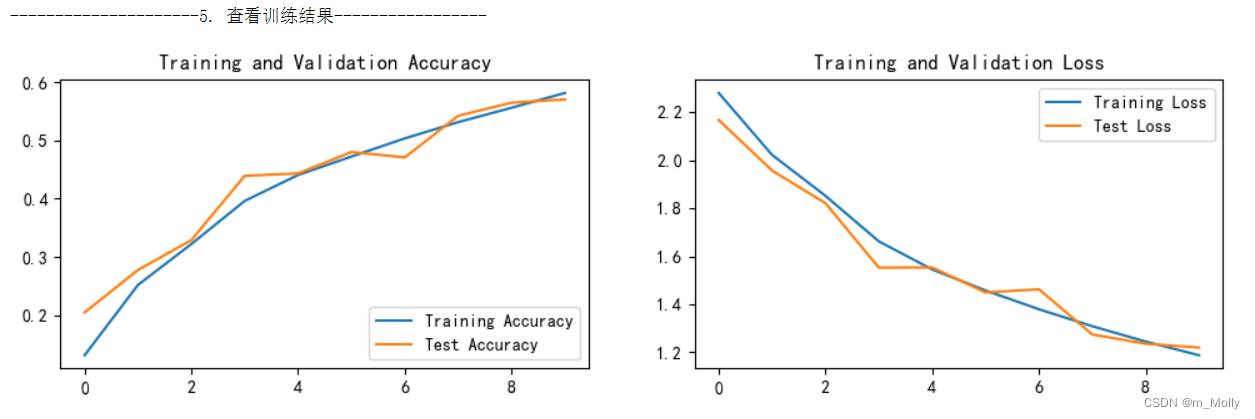
可以看到,训练10个epoch后的效果是非常差的,训练准确率和测试准确率都不到60%。
六、总结
3.1 ⭐ torch.nn.Conv2d()详解
函数原型:
torch.nn.Conv2d(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1, bias=True, padding_mode='zeros', device=None, dtype=None)
关键参数说明:
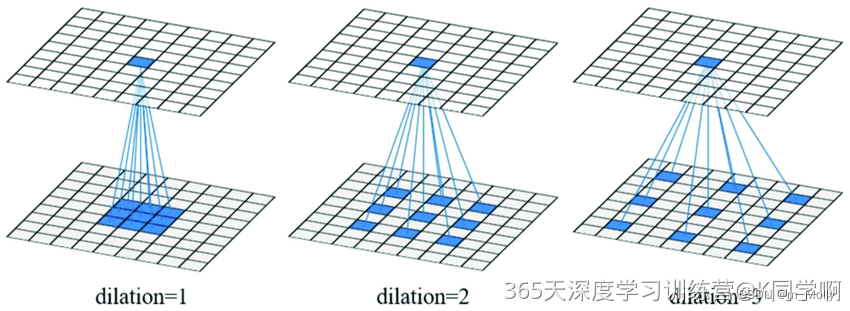
in_channels( int ):输入图像中的通道数out_channels( int ) : 卷积产生的通道数kernel_size( int or tuple ) :卷积核的大小stride( int or tuple , optional ) :卷积的步长。默认值:1padding( int , tuple或str , optional ) : 添加到输入的所有四个边的填充。默认值:0dilation(int or tuple, optional):膨胀操作,控制kernel点(卷积核点)的间距,默认值:1。padding_mode(字符串,可选) : ‘zeros’, ‘reflect’, ‘replicate’或’circular’. 默认:‘zeros’
- 关于dilation参数图解:
3.2 ⭐ torch.nn.Linear()详解
函数原型:
torch.nn.Linear(in_features, out_features, bias=True, device=None, dtype=None)
关键参数说明:
in_features:每个输入样本的大小out_features:每个输出样本的大小
3.3 ⭐torch.nn.MaxPool2d()详解
函数原型:
torch.nn.MaxPool2d(kernel_size, stride=None, padding=0, dilation=1, return_indices=False, ceil_mode=False)
关键参数说明:
kernel_size:最大的窗口大小stride:窗口的步幅,默认值为kernel_size(核的大小)padding:填充值,默认为0dilation:控制窗口中元素步长的参数
3.4 ⭐ 关于卷积层、池化层的计算
下面的网络数据shape变化过程为:
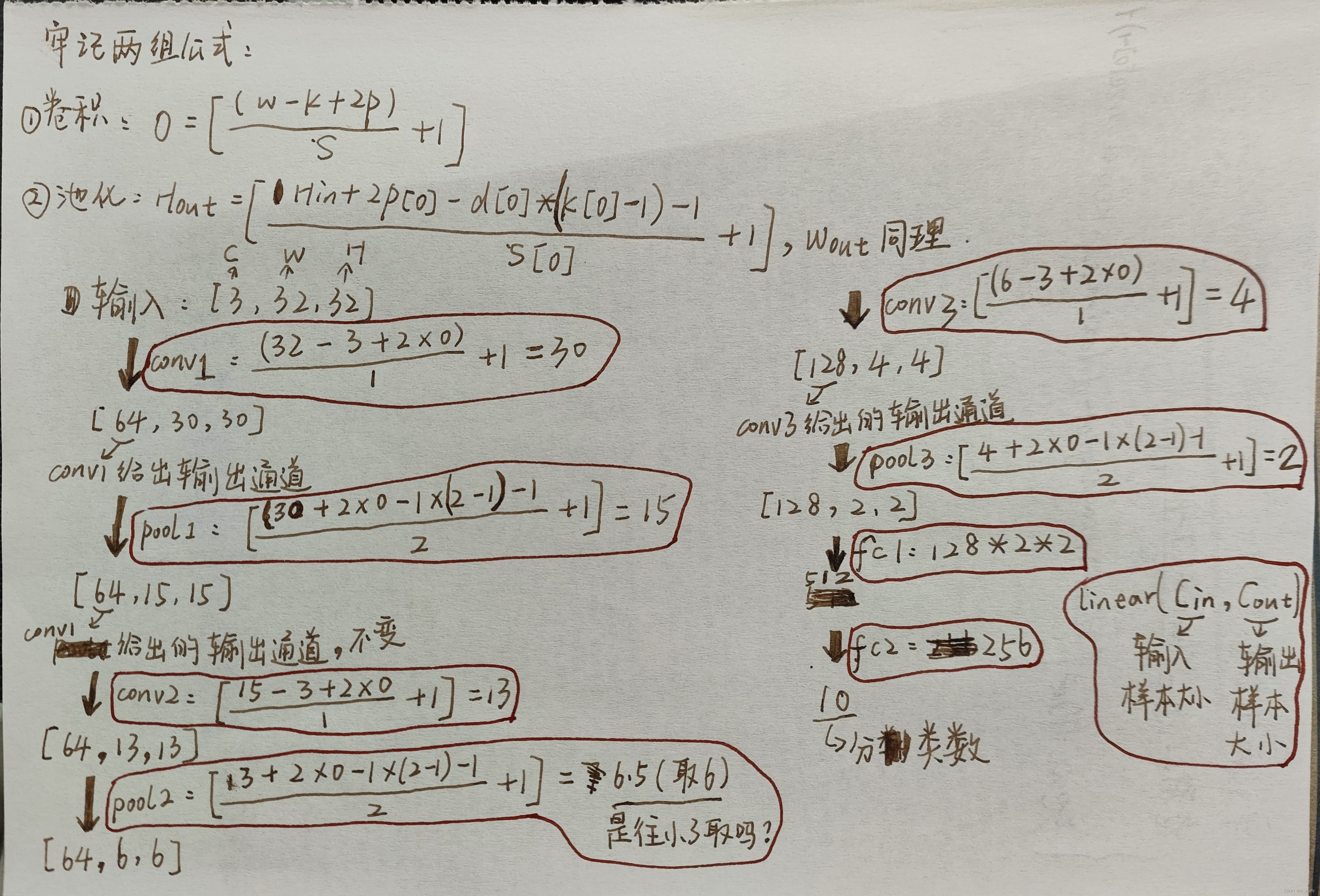
3, 32, 32(输入数据)→ 64, 30, 30(经过卷积层1)→ 64, 15, 15(经过池化层1)→ 64, 13, 13(经过卷积层2)→ 64, 6, 6(经过池化层2)→ 128, 4, 4(经过卷积层3) → 128, 2, 2(经过池化层3)→ 512 -> 256→ num_classes(10)
计算过程如下:
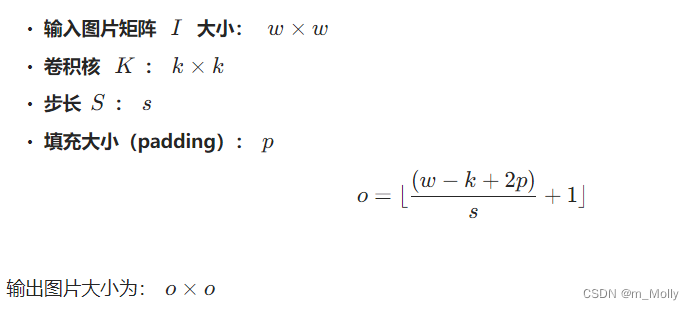
(1)卷积输出shape公式:
输入数据为:[3, 32, 32],即图片矩阵大小为32*32,卷积核大小为3,填充步长为默认值0,步长为默认值1,代入计算得到输出的大小为:30*30,输出通道不变,所以输入数据[3, 32, 32]经过Conv1层后得到的shape为·[64, 30, 30]·。
(2)池化输出公式:
输入的数据格式(从Conv1得到)是:[64, 30, 30]即[C*Hin*Win],已知:Hin=30,padding=0,dilation=1,kernel_size=2,stride=2(即kernel_size),代入上述池化公式,可得Hout=15
同理,Wout=15,C保持不变,故而output.shape为[64, 15, 15]。

4.2.1 optimizer.zero_grad()说明
optimizer.zero_grad()函数会遍历模型的所有参数,通过内置方法截断反向传播的梯度流,再将每个参数的梯度值设为0,即上一次的梯度记录被清空。
4.2.2 loss.backward()说明
-
PyTorch的反向传播(即
tensor.backward())是通过autograd包来实现的,autograd包会根据tensor进行过的数学运算来自动计算其对应的梯度。 -
具体来说,
torch.tensor是autograd包的基础类,如果设置tensor的requires_grads为True,就会开始跟踪在这个tensor上的所有运算,如果做完运算后使用tensor.backward(),所有的梯度就会自动运算,tensor的梯度将会累加到它的.grad属性里面去。 -
更具体地说,损失函数
loss是由模型的所有权重w经过一系列运算得到的,若某个w的requires_grads为True,则w的所有上层参数(后面层的权重w)的.grad_fn属性中就保存了对应的运算,然后在使用loss.backward()后,会一层层的反向传播计算每个w的梯度值,并保存到该w的.grad属性中。 -
如果没有进行
tensor.backward()的话,梯度值将会是None,因此loss.backward()要写在optimizer.step()之前。
4.2.3 optimizer.step()说明
-
step()函数的作用是执行一次优化步骤,通过梯度下降法来更新参数的值。因为梯度下降是基于梯度的,所以在执行optimizer.step()函数前应先执行loss.backward()函数来计算梯度。 -
注意:
optimizer只负责通过梯度下降进行优化,而不负责产生梯度,梯度是tensor.backward()方法产生的。
4.4.1 model.train()说明
-
model.train()的作用是:启用Batch Normalization和Dropout。 -
如果模型中有BN层(Batch Normalization)和Dropout,需要在训练时添加
model.train()。 -
model.train()是保证BN层能够用到每一批数据的均值和方差。 -
对于Dropout,
model.train()是随机取一部分网络连接来训练更新参数。
4.4.2 model.eval()说明
-
model.eval()的作用是:不启用Batch Normalization和Dropout。 -
如果模型中有BN层(Batch Normalization)和Dropout,在测试时添加
model.eval()。 -
model.eval()是保证BN层能够用全部训练数据的均值和方差,即测试过程中要保证BN层的均值和方差不变。 -
对于Dropout,
model.eval()是将所有网络连接都利用起来,即不进行随机舍弃神经元。 -
训练完train样本后,生成的模型model要用来测试样本。在
model(test)之前,需要加上model.eval(),否则的话,有输入数据,即使不训练,它也会改变权值。这是model中含有BN层和Dropout所带来的的性质。
这篇关于【Week-P2】CNN彩色图片分类-CIFAR10数据集的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





