本文主要是介绍wk算法的仿真,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
这是我的第一篇博客,写的初衷是因为当时学做的时候找了很多相关资料,但没有直接能参考的代码,有很大阻力,所以把我完成的这一点东西放这里和大家交流讨论,也希望我能帮到需要的人做入门。
我入门的时候找到一片RDA算法仿真的文章,大佬的代码很工整,井井有条,给我入门雷达点目标仿真提供了不少帮助,本文中仿真信号生成部分也是几乎完全照抄了大佬的代码逻辑,这部分不懂的可以看看原文代码,链接如下合成孔径雷达基于RDA算法的点目标仿真_rda算法点目标_风雨中的小小鸟的博客-CSDN博客
wk算法有时候又被称f-k偏移算法,主要是在频率域做信号处理完成的雷达成像,原理可以看《Digital Processing of Synthetic Aperture Radar Data Algorithms and Implementation》,翻译本是由电子工业出版社出版的《合成孔径雷达成像算法与实现》,工作流程就是
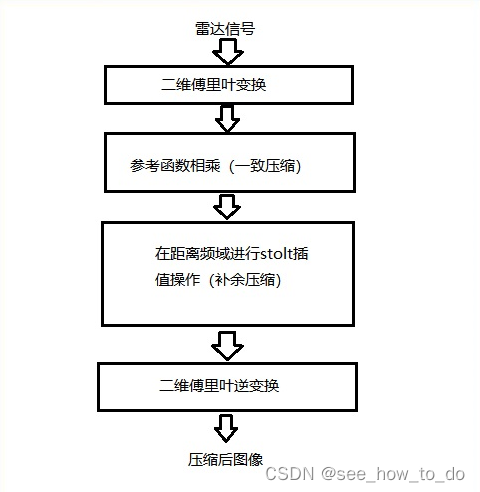
参考函数相乘后信号特点:参考距离处完全聚焦,其他点离参考距离越远,聚焦效果越差
Stolt插值后信号特点:无论离参考距离处远近的点都能完全聚焦
上传的代码我做过一些修改和批注,应该能解决大部分的问题。当初最困扰我的是87行的那个线性补偿,是找了很多资料做了方位向和距离向补偿后,调试时把方位向补偿去掉突然解决的,真要解释清楚可能有点问题,我认为的方向是我做傅里叶变换时有时shift有时没shift回来造成的相位不对齐,所以需要做这样一个补偿。但是我目前没有解释这个问题的压力了,这个部分留给你们去探讨研究啦(开摆)!
另一个大家可能会有疑问的部分是Stolt插值里面为什么计算这么多频率,在这里解释一下:
f_tao2all:所有可能映射到的新频率fτ‘
f_tao2:实际存在的新频率fτ‘
fr_new:由新频率fτ’映射回去得对应的距离向频率,用于插值函数中完成Stolt插值(这里利用的是matlab提供的interp1()函数,这里不是说interp1()自带了Stolt插值的功能,这个只是个matlab自带的插值函数,千万不要以为Stolt插值由这个函数直接完成了,要好好关注之前的那个频率映射,那才是Stolt插值的核心,interp1()只是用来实现的)
由上一步描述,f_tao2实际舍去了一些f_tao2all的点,为什么需要这么做呢?
举个例子,假如方位向频率和距离向频率都是1~100,公式不好打且计算量大,就随便以
fτ’^2=fτ^2+fη^2为例:fτ‘的全部范围应该在[,100
],但是反映射回去时,当fτ’为100
,fη为1时,fτ‘会存在
的原域并不存在的解,所以需要舍去一部分。
(上面可能讲的有点乱,多理理频率映射的关系和各个频率的概念就能懂了,感谢大家担待)
有人提醒了我:
程序里的iftx和ifty是自定义的函数,比如iftx()就是在运行目录新建一个.m文件并命名为iftx,代码为下面的两行,这样可以省去fftshift和ifftshift占用的地方,这一点也是我刚学习的时候从某篇文章得到的思路,具体链接找不到了,感谢这位作者。
function s=iftx(fs)
s=ifftshift(ifft(fftshift(fs)));完整的仿真代码如下,跑出的效果我认为还行吧
clear ;close all;
%% 仿真雷达参数
c = 3e8;%光速
Rc = 2e4; %景中心斜距
Vr = 100; %雷达等效速度
Tr = 5e-6; %发射脉冲时宽
Kr = 6e12; %(Hz/s)距离向调频率
f0 = 1e9; %雷达工作频率
lamda = c/f0; %雷达工作段波长,计算调频率需要
H = 0; %雷达轨道距地面高度
squint_c = 9/180*pi;%波束斜视角
fc = 2*Vr*sin(squint_c)/lamda;%多普勒中心频率%% 仿真目标参数
Lmax=50;Lmin =0;%波束照射方位向范围
Wid_azi = Lmax - Lmin;%波束方位向宽度
LD_c = 10000;LD = 500;%距离向中心点LD_c;范围在LD_c±LD
Ymin = LD_c - LD;Ymax = LD_c + LD;%用于距离向分割
R0 = sqrt(LD_c^2 + H^2);%景中心距离,用作参考函数相乘部分的参考点
La = 4;%方位向天线长度
Lsar=lamda*R0/La; %合成孔径长度
Tsar=Lsar/Vr;%合成孔径内照射时间(某个目标点受照射的时间)Rmin = sqrt(H^2 + Ymin^2);%探测范围内最短距离点
Rmax = sqrt(H^2 + Ymax^2 + (Lsar/2)^2);%探测范围内最远距离点K=3;%仿真点数
x1 = 0;y1 = 10000; x2 = 0; y2 = 9800; x3 = 40; y3 = 10300;
target=[x1,y1,1;x2,y2,1;x3,y3,1];%回波信号仿真
Ka = -2*(Vr^2)/lamda/R0;
N = (Wid_azi+Lsar)/Vr*2*abs(Ka*Tsar); %方位向采样数
M = 2*(Rmax - Rmin)/c*2*Kr*Tr + Tr*2*Kr*Tr; %距离向采样数N = 2^nextpow2(N);
M = 2^nextpow2(M);%将N和M化为2的幂次方便于fftT_azimuth = linspace((Lmin-Lsar/2)/Vr,(Lmax+Lsar/2)/Vr,N);%方位向时间
T_tao = linspace(2*Rmin/c - 0.5*Tr,2*Rmax/c + 0.5*Tr,M); %接收器开启时间段(时间起点可以自己定,总长为2*(Rmax-Rmin)/c + Tr即可)
sig_re = zeros(N,M);
for k = 1:1:KA_refle = target(k,3); %反射系数(对应目标点电介质常数)L_bet = T_azimuth*Vr - target(k,1);%接收端与目标的方位向距离r0 = sqrt(H^2 + target(k,2)^2); %瞬时水平平面距离R_inta = sqrt(r0^2 + L_bet.^2); %瞬时斜距T_behind = 2*R_inta/c; %被减去的2R/c延时t = ones(N,1)*T_tao - T_behind'*ones(1,M);phase = pi*(Kr*(t.^2) - 4*f0/c*R_inta'*ones(1,M));sig_re = sig_re + A_refle*exp(1i*phase).*(0<t&t<Tr).*((abs(L_bet)<Lsar/2)'*ones(1,M));%%仿真信号的生成依据书<合成孔径雷达成像算法与实现>page105的(5.2)式完成%%英文原著为《Digital Processing of Synthetic Aperture Radar Data Algorithms and Implementation》%%上述页码是由电子工业出版社出版的翻译本,名字《合成孔径雷达成像算法与实现》
end%% 点目标仿真图像
figure(1)
subplot(211)
imagesc(abs(sig_re));title('SAR 3point')
subplot(212)
imagesc(angle(sig_re)) row=T_tao*c/2; %% 行相当于距离(不是y)
col=T_azimuth*Vr; %% 列%% 二维傅里叶变换
Sig_re = fftshift(fft(ifftshift(sig_re,1),N,1),1);
Sig_re = fftshift(fft(ifftshift(Sig_re,2),M,2),2);
%% 参考函数相乘
%频域分点
%注:此处命名有不规范,因为是一开始照着RDA那篇文章自己写的,概念有模糊,但是懒得
%%%改了,一个是方位向时间和频率,不应该用PRT命名;一个是距离向时间和频率
PRT_amu = (Lmax - Lmin + Lsar)/Vr/N;
PRF_amu = 1/PRT_amu;
f_inta = linspace(-PRF_amu/2,PRF_amu/2,N) ;%+ fc;PRT_dis = (2*Rmax/c - 2*Rmin/c + Tr)/M;
PRF_dis = 1/PRT_dis;
f_tao = linspace(-PRF_dis/2,PRF_dis/2,M);%参考函数构造
Rref = 9500;%取参考距离点为9500处
phase_ref = 4*pi*Rref/c*sqrt(ones(N,1)*(f0+f_tao).^2 - c^2*(f_inta'*ones(1,M)).^2/4/(Vr^2)) + pi*ones(N,1)*(f_tao).^2/Kr;
%参考函数的构造推导详情看书<合成孔径雷达成像算法与实现>中第八章wk算法,结果在page105的(8.3)式
phase_ref = phase_ref - 2*pi*f_tao*2*R0/c;%这里出来的有点偶然,应该是一个线性相位延迟,R0是景中心频率
H_ref = exp(1i*phase_ref);%参考函数相乘
Sig_RFM = Sig_re.*H_ref;
WinForR = ones(N,1)*kaiser(M,2.5)';%凯瑟窗
Sig_RFM = Sig_RFM.*WinForR;%成像看效果,方便debug
sig_ref = iftx(ifty(Sig_RFM));figure(2)
colormap(gray)
imagesc(row,col,255-abs(sig_ref));
title('一致压缩'),xlabel('距离向'),ylabel('方位向');figure(3)
contour(row,col,abs(sig_ref));
title('一致压缩等高线图'),xlabel('距离向'),ylabel('方位向');%% stolt插值
Sstolt_phase_NaN = zeros(N,M);Sstolt_abs_NaN = zeros(N,M);Sig_stolt = zeros(N,M);
%依据page206的(8.5)式计算出f_tao'用以替代f_tao从而完成距离徙动的修正;
f_tao2all = sqrt((f0+f_tao).^2 - (c*f_inta'/2/Vr).^2) - f0;%%f_tao映射到f_tao'f2_min = max(min(transpose(f_tao2all)));
f2_max = min(max(transpose(f_tao2all)));
f_tao2 = linspace(f2_min,f2_max,M) ;%这三行选f_tao在范围内的f_tao'fr_new = sqrt((f0+f_tao2).^2 + (c*f_inta'/2/Vr).^2) - f0;%%f_tao'映射到f_taofor i1 = 1:1:NSstolt_phase_NaN(i1,:) = interp1(f_tao(:),unwrap(angle(Sig_RFM(i1,:))),fr_new(i1,:),'spline',0); Sstolt_abs_NaN(i1,:) = interp1(f_tao(:),abs(Sig_RFM(i1,:)),fr_new(i1,:),'spline',0); %注:这里插值也可以直接对复数信号Sig_RFM做插值,这里是因为debug的时候不出结果,所以对幅角和幅度分开插值
end
Sig_stoltNaN = Sstolt_abs_NaN.*exp(1i*Sstolt_phase_NaN);
%下述步骤用于清除一部分不在理论幅度范围内的信号,用补0处理
num_find = find(~isnan(Sig_stoltNaN));
Sig_stolt(num_find) = Sig_stoltNaN(num_find);
sig_stolt = iftx(ifty(Sig_stolt));figure(4)
contour(row,col,abs(sig_stolt));
title('stolt插值后等高线图'),xlabel('距离向'),ylabel('方位向');figure(5)
colormap(gray)
imagesc(row,col,255-abs(sig_stolt));
title('stolt插值后幅度图'),xlabel('距离向'),ylabel('方位向');
deta = abs(sig_stolt - sig_ref);谢谢大家看到这里,有问题或者补充欢迎讨论呀
这篇关于wk算法的仿真的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









