旋量专题

【学习记录】vicon与运动旋量
本文仅用于记录自己的学习经历。 最近在搞vicon的手眼标定,计算的结果总是不太正确。vicon可以导出的有XYZ欧拉角和Helical表示。一开始以为Helical就是Rodrigues表示,但算出来的手眼标定结果太离谱。折腾了半天,虽然手眼标定还没搞定,但是已经放弃了。 Google了一下Helical Axis,发现又叫:screw axis, twist axis。在LYC的帮助下发现
智能机器人与旋量代数(12)
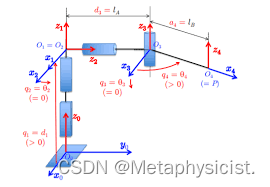
Chapt 4. 旋量代数在机器人学中的应用 4.1 串联机器人正运动学的指数积(PoE, Product of Exponetial)公式 4.1.1 回顾:机器人正运动学的Denavit-Hartenberg (D-H)参数公式 D-H 建模法: D-H 建模方法是由 Denavit 和 Hartenberg (ASME, 1955) 提出的一种建模方法,主要用在机器人运动学上。此方法在
智能机器人与旋量代数(9)
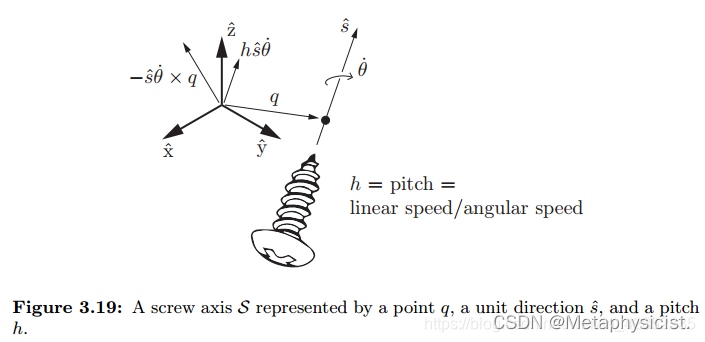
Chapt 3. 螺旋运动与旋量代数 3.1 螺旋运动 螺旋运动是关于一条空间直线的一个旋转运动,并伴随沿此直线的一个平移。是一种刚体绕空间轴 s s s旋转 θ \theta θ角,再沿该轴平移距离 d d d的复合运动,类似螺母沿螺纹做进给运动的情形。 一些定义: 当 θ ≠ 0 \theta\neq0 θ=0 时,将移动量与转动量的比值 h = d θ h=\frac{d}{