本文主要是介绍从零入门激光SLAM(十四)——简单有效的激光里程计KISS-ICP,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
KISS-ICP: In Defense of Point-to-Point ICP Simple, Accurate, and Robust Registration If Done the Right Way
论文地址:KISS-ICP: In Defense of Point-to-Point ICP – Simple, Accurate, and Robust Registration If Done the Right Way | IEEE Journals & Magazine | IEEE Xplore
代码:https://github.com/PRBonn/kiss-icp
一、文章概述
1.问题导向
SLAM系统经过长久的发展,系统变得越来越复杂,拥有许多参数需要调整,同时新型的激光雷达使得很多里程计不再适用。
2.目标
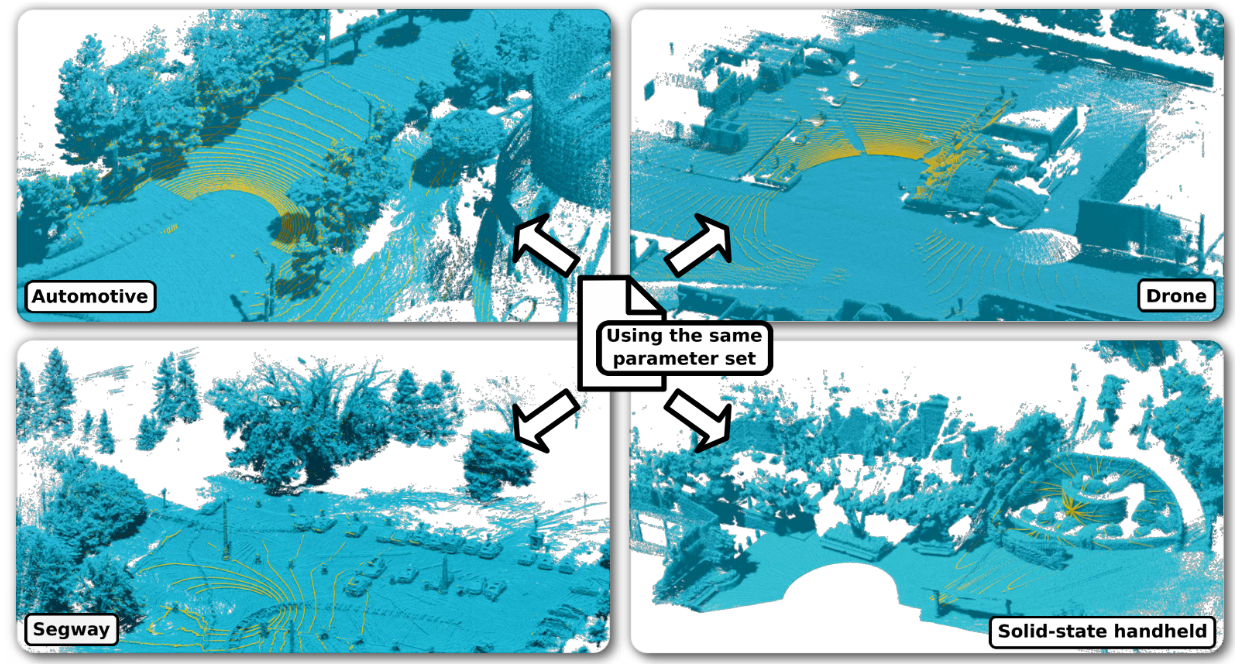
我们的设计既不使用复杂的特征提取技术、学习方法,也不使用循环闭合。相同的参数集适用于各种具有挑战性的场景。专注于激光里程计的本质。
3.摘要
机器人平台的稳健和准确的位姿估计,即所谓的基于传感器的里程计,是许多机器人应用的重要组成部分。虽然许多传感器里程计系统通过增加运动估计过程的复杂性而取得了进展,但我们却朝着相反的方向前进。通过去掉大部分部件并聚焦于核心元件,我们获得了一个令人惊讶的有效系统,该系统易于实现,并且可以使用不同的激光雷达传感器在各种环境条件下运行。我们的里程计估计方法依赖于点对点ICP结合自适应阈值进行对应匹配、稳健的核、简单但广泛适用的运动补偿方法以及点云分采样策略。这产生了一个只有几个参数的系统,在大多数情况下,这些参数甚至不需要调整到特定的激光雷达传感器。我们的系统使用相同的参数,在使用不同平台的各种操作条件下与最先进的方法性能相当:汽车平台、基于无人机的操作、赛格威等车辆或手持激光雷达。我们不需要集成IMU信息,仅依赖从各种3D LiDAR传感器获得的3D点云数据,从而实现了不同应用和操作条件的广泛范围。我们的开源系统在所有提供的数据集中的运行速度都快于传感器帧速率,并且是为真实世界场景而设计的。
4.贡献
提出一种简单而高效的方法来构建激光雷达里程计系统,该系统可以在机器人通过环境导航时准确地在线计算机器人的姿态。
我们表明,通过正确使用基于系统物理和传感器数据性质的基本推理的ICP,我们可以获得有竞争力的里程计。
除了运动预测、空间扫描下采样和鲁棒的核之外,我们在机器人运动估计的背景下引入了用于ICP的自适应阈值方法,这使得我们的方法有效,同时易于推广。
5.不足
不能够自适应下采样,不适用空间尺度多变的场景
轨迹不够鲁棒,不够平滑二、方法解析
2.1 系统pipeline
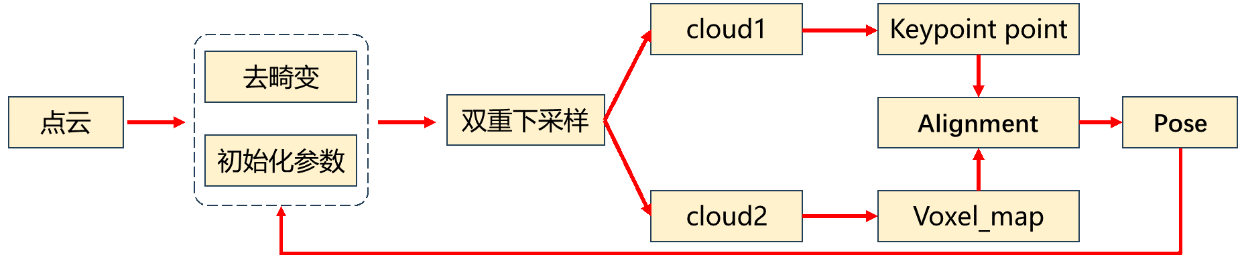
输入:点云
输出:位姿与点云地图
- 运动预测与点云去畸变
- 点云下采样
- 在局部地图中寻找最邻近对应点
- 自适应ICP迭代优化
这项工作旨在通过顺序注册扫描仪记录的点云来增量计算移动的激光雷达传感器的轨迹。我们将元件减少到构建有效、精确、稳定且相当简单的激光雷达里程计系统所需的最少数量。对于以局部的、以自我为中心的点云的形式的每个3D扫描,我们执行以下四个步骤来获得在时间t的全局姿态估计TT∈SE(3)。首先,我们应用传感器运动预测和运动补偿(通常称为去扭斜)来消除扫描期间由传感器运动引起的3D数据失真。其次,我们对当前扫描进行二次采样。第三,我们估计输入点云和参考点云之间的对应关系,我们称之为局部地图。我们使用自适应阈值方案进行对应估计,限制可能的数据关联并过滤掉潜在的异常值。第四,我们使用鲁棒的点到点ICP算法将输入点云配准到局部地图。最后,我们用配准扫描的下采样版本更新局部地图。在以下部分中,我们将详细描述这些组件。
详情请转...
从零入门激光SLAM(十四)——简单有效的激光里程计KISS-ICP - 古月居 (guyuehome.com)
这篇关于从零入门激光SLAM(十四)——简单有效的激光里程计KISS-ICP的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





