本文主要是介绍图形学基础笔记III:图形管线中的多边形裁剪算法、Sutherland-Hodgman、Guard Band Clipping,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!

这个主要讲的是viewport 里的。
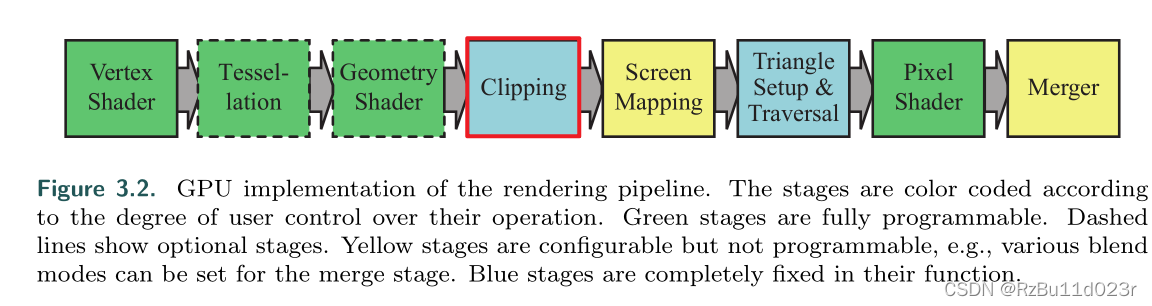
从 frustum (根据 fov 视场角 和 aspect ratio 纵横比决定 lrbt,front、near 是由摄像机距离和世界大小决定的)到 viewport 之后,能够看到的就只有投影后的 cuboid 在 viewport 里面的东西了。
问题是这个 clipping 是在 CPU 还是 GPU?实际有多个阶段,从 culling,CPU clipping 到 GPU clipping 和GPU rasterization。
本文尝试讲解这个问题,不过实际显卡和驱动变幻莫测,还需要更多参考资料。
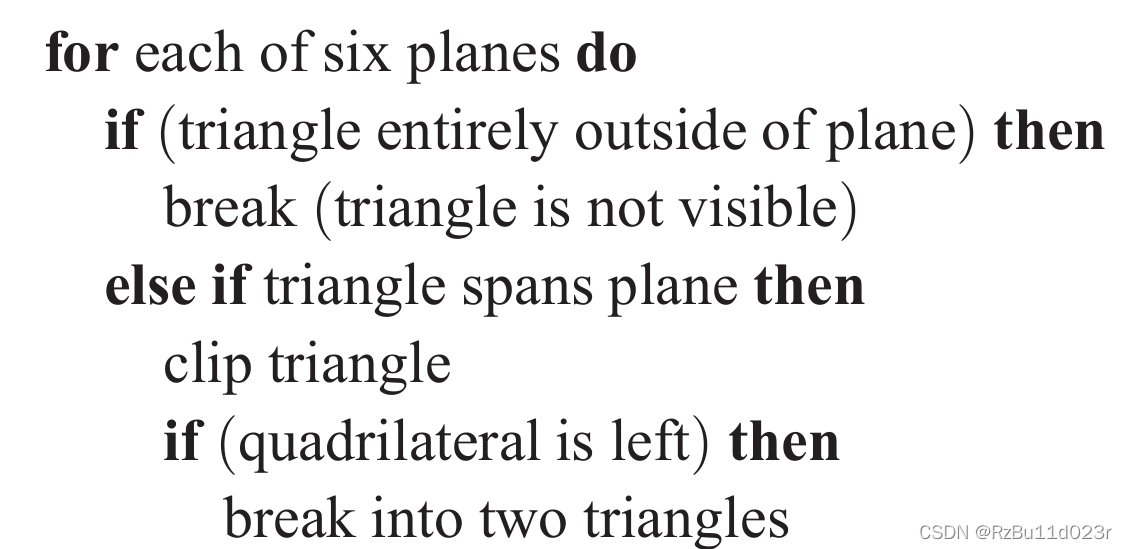
但是有些麻烦的是因为只能处理三角形,如果裁剪了之后变成 polygon 了就要重新划分三角形了。好在三角形切一刀只会变成三角形或者四边形(quadrilateral)。
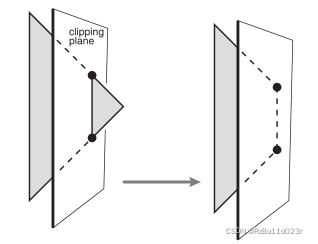
所以可以用下面的伪代码对整个 cuboid 内的 3D 三角形进行处理。
tiger book 也分析了裁剪实际放在 mvp 之前也可以,除以齐次坐标后也可以,在mvp之后也可以,但是除法之后(世界坐标)对于眼睛附近的地方是不连续的,所以这方面的运动就很难,所以一般在 MVP 后的除法之前做,而超平面也不难表示。对于 mvp 之后的平面方程则是最简单了(因为就是正立方体)。
首先是对直线的裁剪的硬件算法,即 cohen-sutherland 算法。对于多边形的裁剪是基于直线的裁剪的 sutherland-hodgman。一般讲解的是 2D 的情况,实际有 3D 的算法。
这部分算法可能是在 CPU 做的,也可能是在 GPU(看下面的 Guard band clipping 里面就明白了,对于不同的区域而言,有一些必须 CPU 就剪好,有一些可以让 GPU 剪,最后都是看你驱动怎么实现的),而且最新的硬件算法你也不知道是什么,会经过奇特的优化,其中还涉及到插值的问题。
对于一半在 viewport 里面的三角形,其实最简单的做法是 AABB 遍历的时候只访问 viewport 里面的像素就行了,感觉也没什么,关键是你不能剪掉的啊,剪掉了那 vertex 的信息就没了(OpenGL 规定是在 VS 后面进行 clipping),还要重建新的三角形和分割,那还 render 个寂寞。
对于 hardware clipping 来说,实际你还是要进行这部分的数据传输。如果不想数据传输就涉及在 CPU 端做 culling。optimization - At what phase in rendering does clipping occur? - Stack Overflow
当然,上面说的最简单的做法是 AABB 遍历的时候只访问 viewport 里面的像素就行。但是这样实际是要求显卡的实际能用的缓冲区是要大于 viewport 的。如果你的图元连缓冲区都放不下,是不是就一定要做类似 sutherland-hodgman 然后按老虎书说的要看情况拆成两个新的三角形,还要处理边界值(根据被剪掉的顶点插值好属性从而不会丢失)。
Nvidia 和 D3D 有一个叫 guard band clipping 的 culling + clipping 的层次算法,从 CPU 一路到 GPU 的,所以可能 GPU 就没有实现:
Guard Band Clipping in Direct3D (nvidia.cn)
Cohen-Sutherland
- 平面编码:使用 tbrl 4位编码,如果是在 viewport 的 tbrl 就为 1. 每个位置最多两个 1.
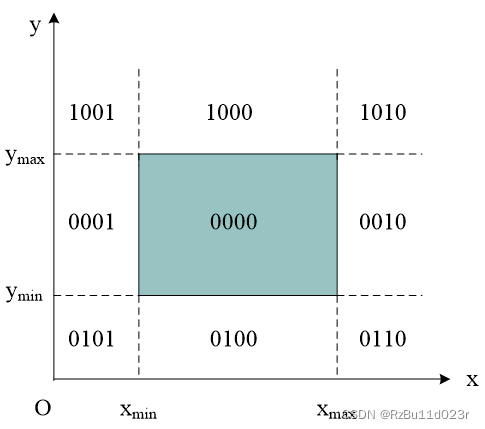
- 在交点处把线段分为两段。其中一段完全在窗口外,可弃之。然后对另一段重复上述处理。
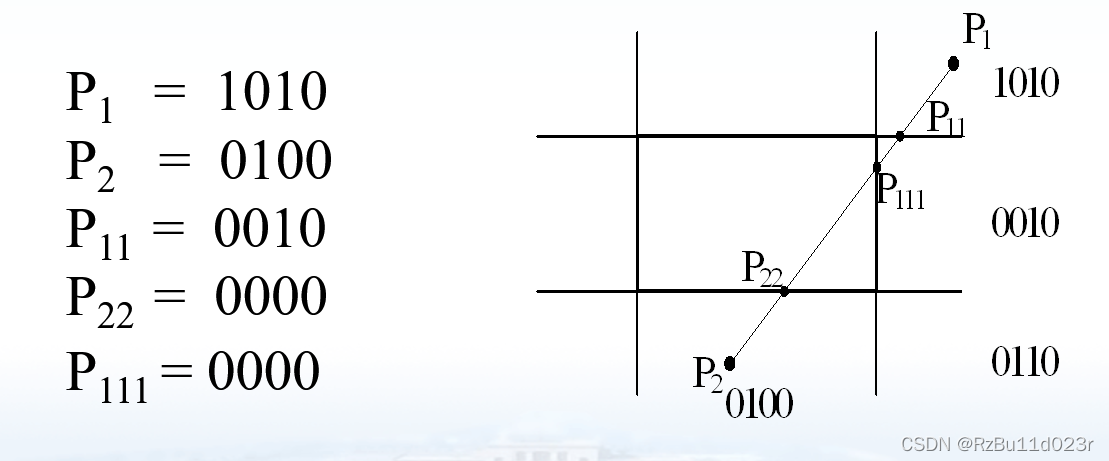
- 如上图,实际只需要对直线的端点(其实一直说直线说的是线段)求这个编码,根据不同的情况,然后递归/迭代进行下去:
// Cohen–Sutherland clipping algorithm clips a line from// P0 = (x0, y0) to P1 = (x1, y1) against a rectangle with// diagonal from (xmin, ymin) to (xmax, ymax).void CohenSutherlandLineClipAndDraw(double x0,double y0,double x1,double y1) {// compute outcodes for P0, P1, and whatever point lies outside the clip// rectangleOutCode outcode0 = ComputeOutCode(x0, y0);OutCode outcode1 = ComputeOutCode(x1, y1);bool accept = false;while (true) {if (!(outcode0 | outcode1)) {// bitwise OR is 0: both points inside window; trivially accept and exit// loopaccept = true, break;} else if (outcode0 & outcode1) {// bitwise AND is not 0: both points share an outside zone (LEFT, RIGHT,// TOP, or BOTTOM), so both must be outside window; exit loop (accept is// false)break;} else {// failed both tests, so calculate the line segment to clip// from an outside point to an intersection with clip edgedouble x, y;// At least one endpoint is outside the clip rectangle; pick it.OutCode outcodeOut = outcode1 > outcode0 ? outcode1 : outcode0;// Now find the intersection point;// use formulas:// slope = (y1 - y0) / (x1 - x0)// x = x0 + (1 / slope) * (ym - y0), where ym is ymin or ymax// y = y0 + slope * (xm - x0), where xm is xmin or xmax// No need to worry about divide-by-zero because, in each case, the// outcode bit being tested guarantees the denominator is non-zeroif (outcodeOut & TOP) // point is above the clip windowx = x0 + (x1 - x0) * (ymax - y0) / (y1 - y0), y = ymax;else if (outcodeOut & BOTTOM) // point is below the clip windowx = x0 + (x1 - x0) * (ymin - y0) / (y1 - y0), y = ymin;else if (outcodeOut & RIGHT) // point is to the right of clip windowy = y0 + (y1 - y0) * (xmax - x0) / (x1 - x0), x = xmax;else if (outcodeOut & LEFT) // point is to the left of clip windowy = y0 + (y1 - y0) * (xmin - x0) / (x1 - x0), x = xmin;// Now we move outside point to intersection point to clip// and get ready for next pass.if (outcodeOut == outcode0)x0 = x, y0 = y, outcode0 = ComputeOutCode(x0, y0);elsex1 = x, y1 = y, outcode1 = ComputeOutCode(x1, y1);}}
}Sutherland-Hodgman 多边形裁剪算法
- 关键在于怎么确定凸的凹的那些要不要封闭。
- 按某个顺序逐边裁剪:
- 多边形边的分类:把所有边都按逆时针确定起点 S 和终点 P。每次裁剪的时候,viewport 边界裁剪线要做延长,再划分 in out 分区
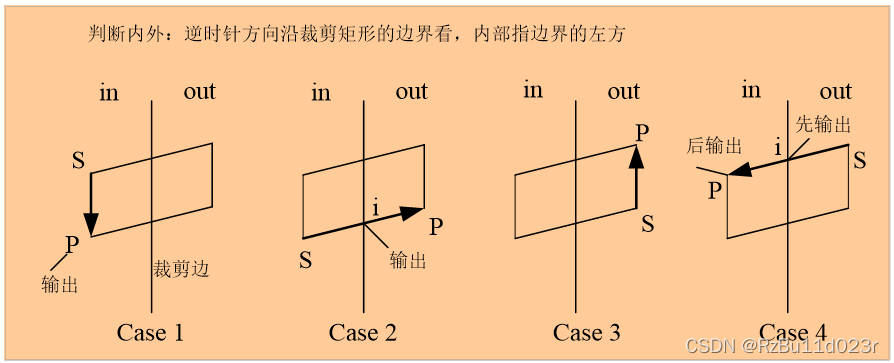
- case1 是整条边都在viewport 里面的(通过 Cohen-Sutherland 得知的),只保留终点。
- case2 是内往外出,保留交点。(起点会由另一个闭合边输出),交点的求法可以用数值解。
- case3 边在外面,不保留顶点。
- case4 外面进来,保留交点和终点。
- 一言:对于相交的,在 viewport 内的终点,以及交点都要保留
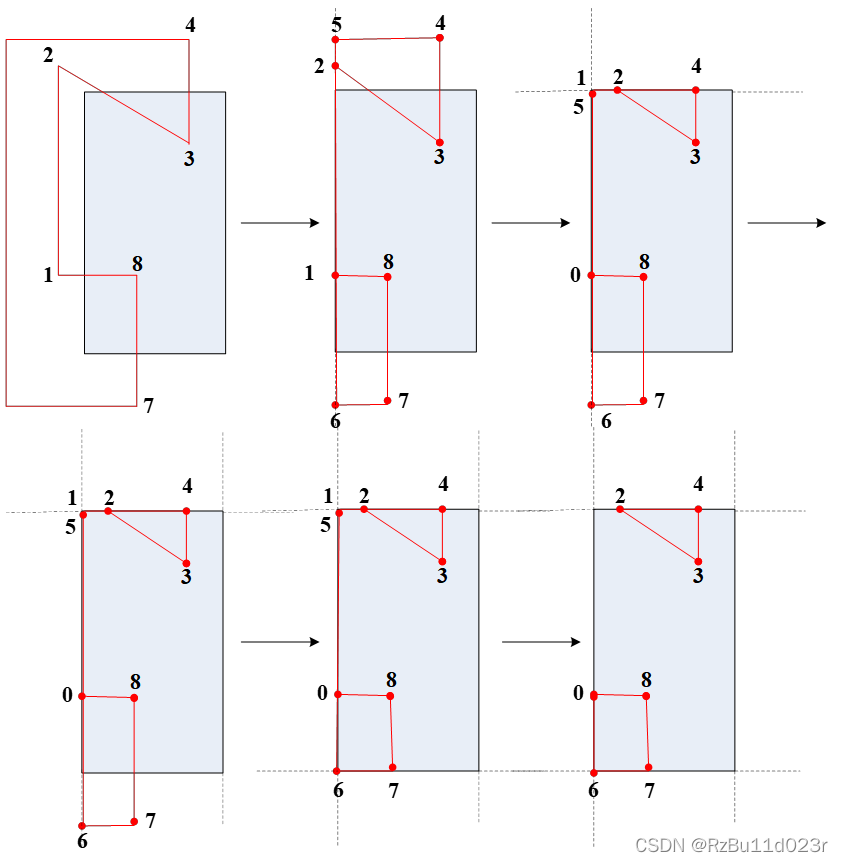
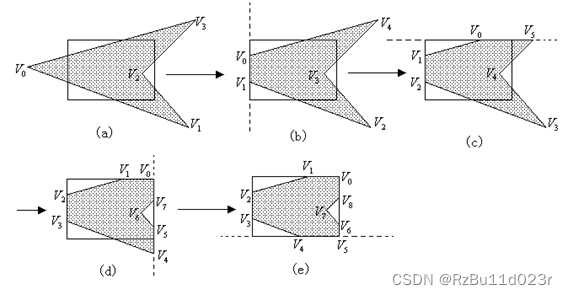
- 后处理:由于这个算法输出的是点,这里演示了一个凹多边形,所以你怎么把连连起来呢?wiki 说 Note that if the subject polygon was concave at vertices outside the clipping polygon, the new polygon may have coincident (i.e., overlapping) edges – this is acceptable for rendering, but not for other applications such as computing shadows.
- 所以说必须要做一个后处理,实际你处理不了,只能加一些专家系统的解决一部分问题。不过既然三角形是凸的,所以实际可以不管他(然而我感觉用这个只处理三角形是不是有点浪费?)别的算法也是针对 polygon 的。可能说三角形还能优化。不过注意的是,对于三角形切了之后变成四边形的情况还要割呢。
- 交点插值:由于与切割线的交点已经不是原来三角形的顶点了,所以 clipping 的过程要求一下新的顶点的重心坐标,把插值后的属性放到新的顶点上取。
- 切分三角形:这个过程很简单的,只要切完了之后看一下有多少个顶点,如果是 4 个就切一刀,把对应 vertex 的 attributes 都要复制一份。
- 原理:其实上边这些操作指南一样的东西,是可以用三角形来推导出来的。规定顺时针方向和逆时针方向都行。就是依次遍历三角形的三条边,然后能够依次把要保留(裁剪)的顶点不遗漏不多选地列举出来。其实那几条规则对三角形来说实在是想当然的,可以穷举所有情况,。
Homogeneous Clipping
- 算法论文:p245-blinn.pdf (fabiensanglard.net)
- 上面这个 Sutherland-Hodgman 算法一看好像只能用在 2D 上,有一定的局限。
- 但是我们可以考虑把裁剪线扩展为裁剪面,而交点还是交点,只不过变成了 3D 的直线(线段)与平面的交点。
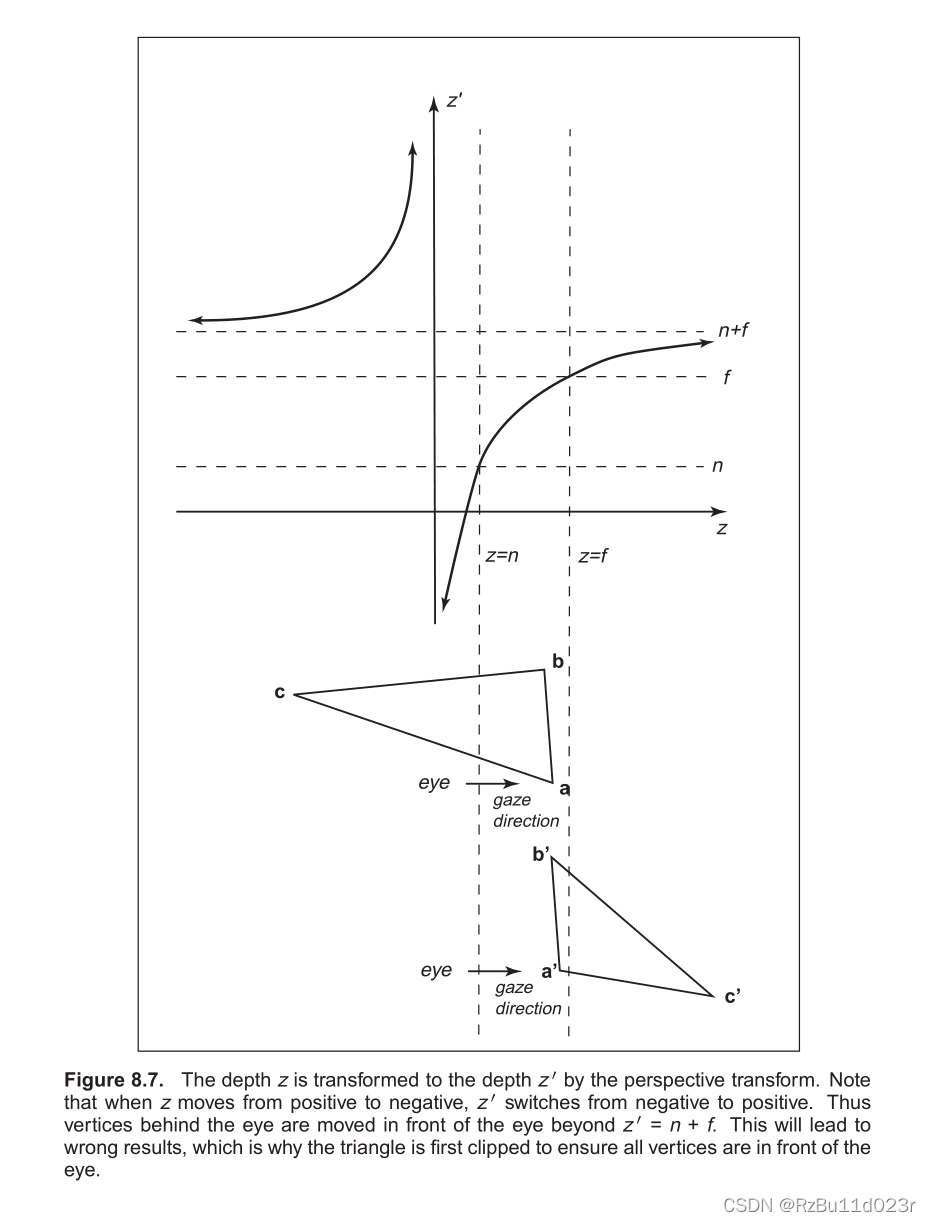
- 前面提到虎书说到,我们可以在 MVP 之后,做除法之前进行 clipping。这就是齐次坐标裁剪。复习一下为什么要在除法之前进行 clipping 呢,这是因为除法之后(世界坐标)对于眼睛附近的地方是不连续的(复习 MVP 矩阵的推导),所以一般在除法之前做。(记住除法的那个 w 其实在运算过程为了化简其他,用的就是 z 就行了,也就是因为这个 z 的除法引入了反比例函数)。
- P 矩阵的问题就是这里,回想 games101 讲 transformation II 的矩阵的推导,由于 P 矩阵主要是我们基于 x 和 y 来推导的,z 的这个是凑出来的。所以这下问题就导致最后会出错
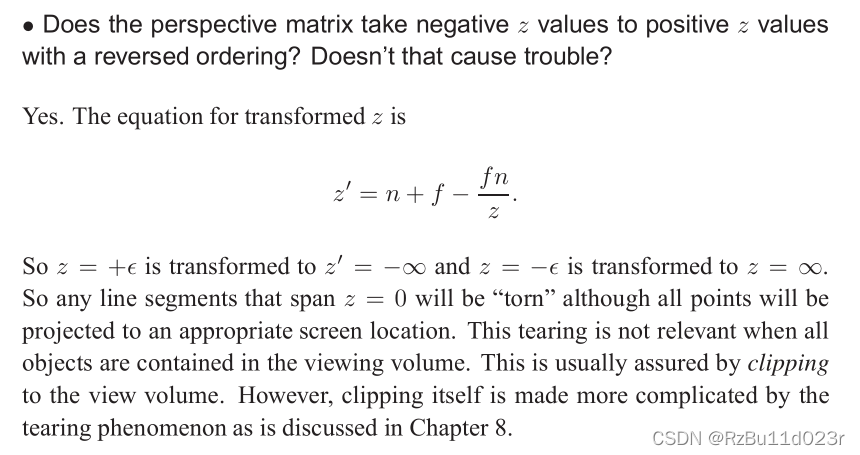
- 但是实际还是大部分可以是正比关系的,只要 n + f 够给力,但是反比例函数的特性,必然有一部分会被弄反。
- 实际疯狂 google 找到齐次裁剪的关键字之后,也发现了有大佬的漂亮公式文章,这里也附上作为参考,我暂时就不研究具体公式(不过其实和上面 Sutherland-Hodgman 算法的差不多)。计算机图形学补充2:齐次空间裁剪(Homogeneous Space Clipping) - 知乎 (zhihu.com)。需要注意齐次坐标裁剪和 Sutherland-Hodgman 的关系就行。
实际显卡驱动中的 culling & clipping
- Nvidia 的算法说明:Guard Band Clipping in Direct3D (nvidia.cn)
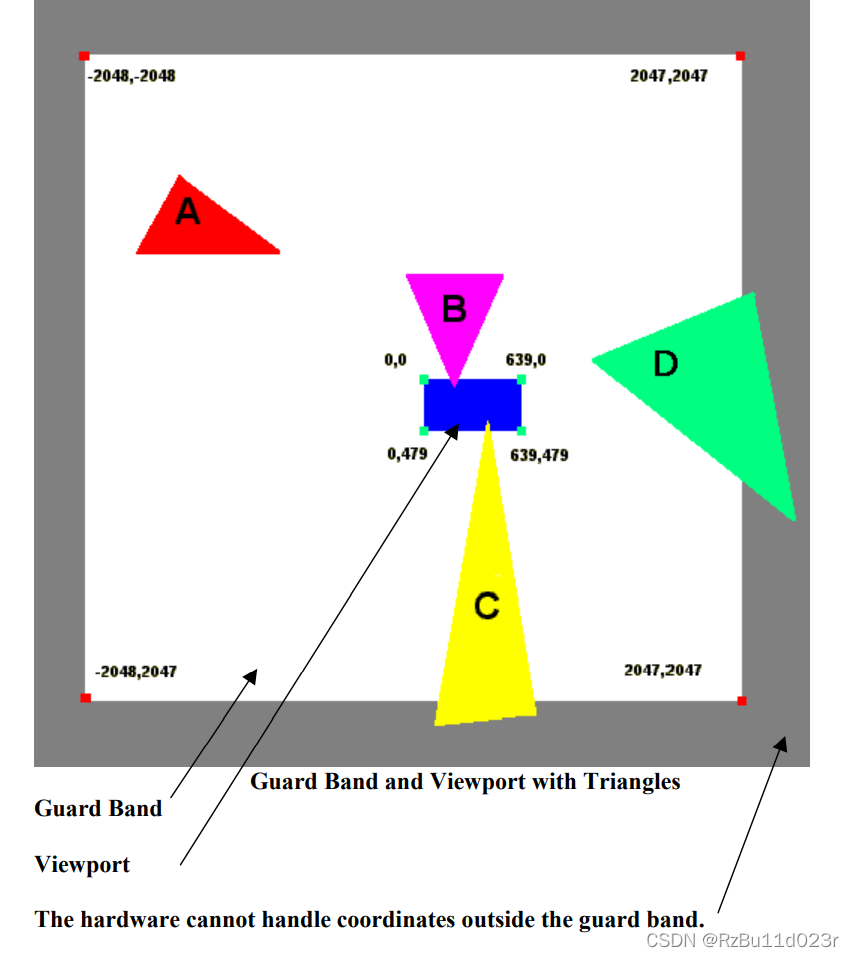
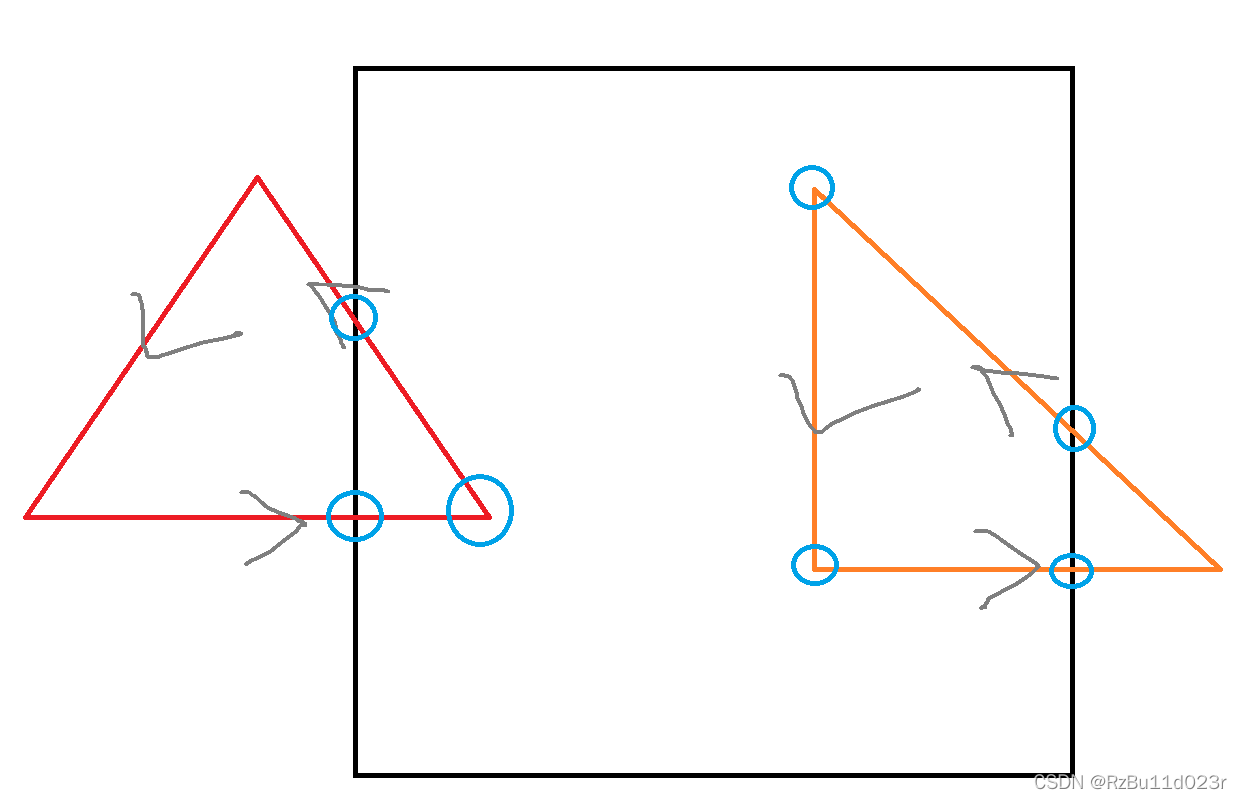
- 由于显卡的帧缓冲是有限的,为了能够支持更大的世界,实际显卡的帧缓冲是支持比 viewport 的帧缓冲大小大得多的的,这个叫做guard band。但是他仍然是有限的,显卡能够处理的三角形也是必须在有限的空间里的(但是三角形的个数可以轻松上亿甚至十几亿),一半 60 帧的引擎同屏渲染几亿三角形应该不在话下。
- 所以实际 CPU 传给 GPU 进行光栅化的三角形空间位置也不能超出视口太多然后还要渲染的,这样的结果是显卡自己处理不了这种三角形,因为他无法访问这么大范围的数据。
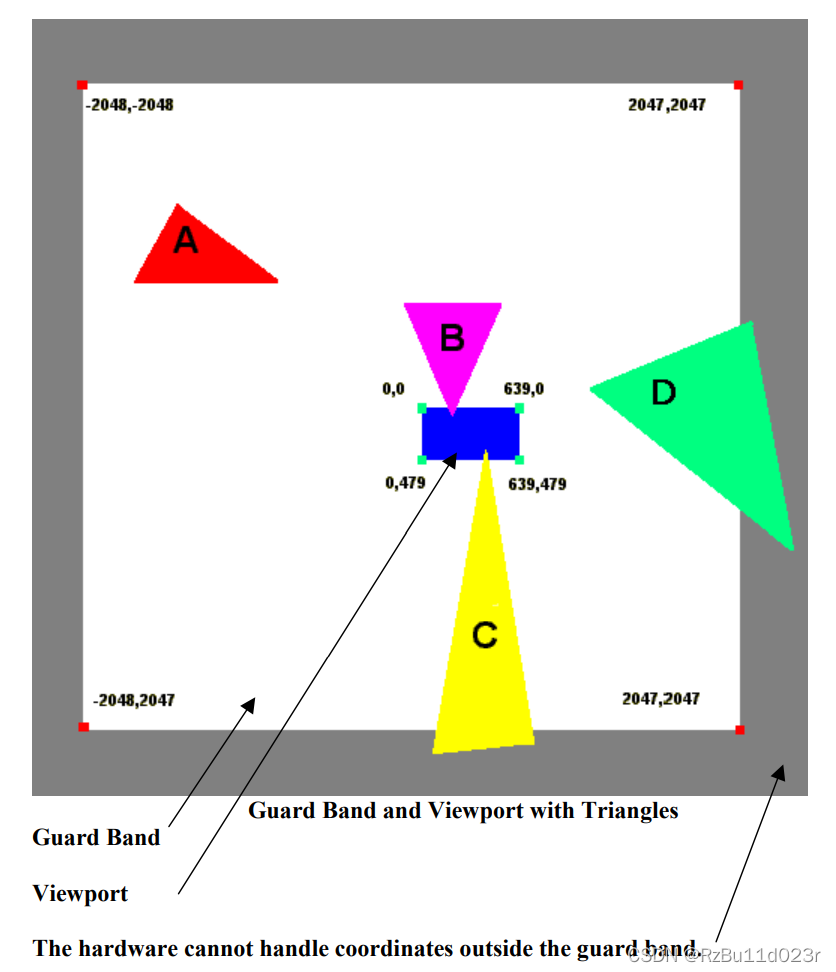
- 所以是两阶段裁剪算法:CPU 必须保证所有传送的三角形都在 Guard band 里面。GPU 自己再裁一遍。
- 上图,A 可以硬件丢弃,B 可以硬件裁剪。D 传送的时候就被丢掉了(驱动做),或者 CPU 可以丢掉。C 就是一个很麻烦的三角形,关键是他还和 viewport 相交了。所以必须要进行软件裁剪(CPU 进行)。
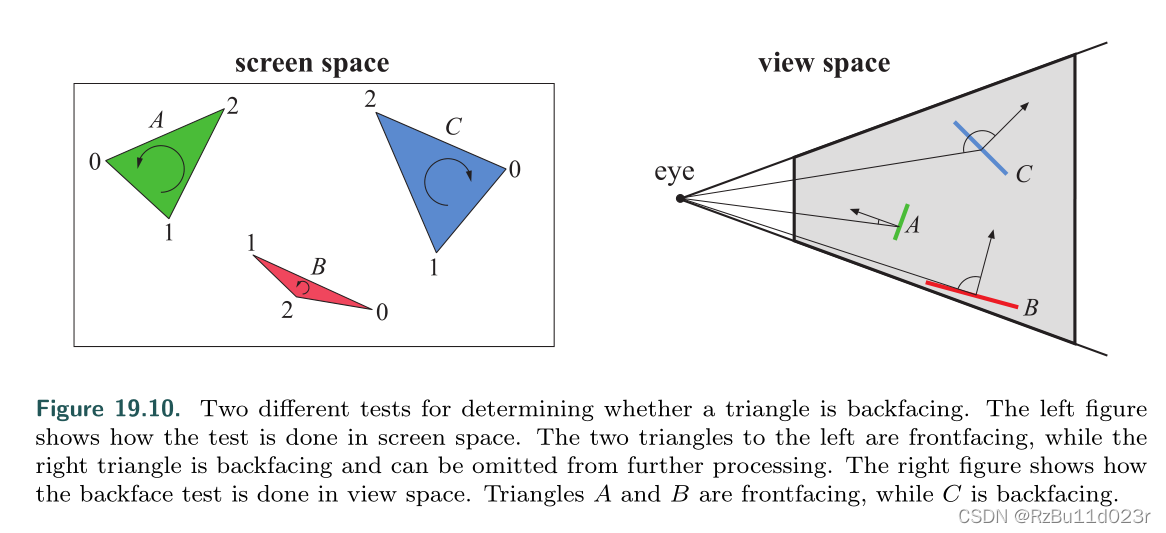
实际对于3D 来说,一些背面三角形没有必要渲染,直接丢掉,这个叫做背向面剔除
这篇关于图形学基础笔记III:图形管线中的多边形裁剪算法、Sutherland-Hodgman、Guard Band Clipping的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




