本文主要是介绍三维坐标点按剖面分类,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、写在前面
①配套文件:根据剖面对三维坐标点(X,Y,Z)分类资源-CSDN文库
②脱敏处理:蚀变数据已采用随机数生成覆盖
③剖面坐标按顺序排列在“剖面坐标点.xlsx”文件中
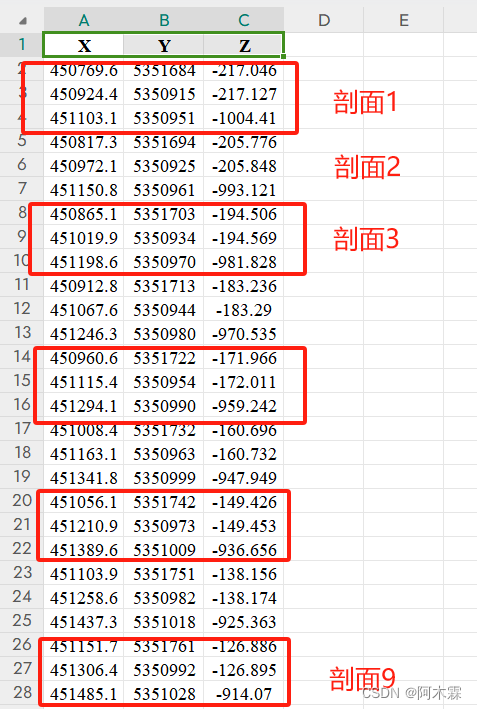
二、3点确定空间中平面方程
原理:
设3点A,B,C
计算向量AB和AC
法向量n = AB × AC (叉乘)
得到n(ni,nj,nk)后,设方程为
ni * X + nj * Y + nk * Z = D
代入A,B,C任意一点的坐标得出D值后就可以得到平面方程
代码:
输入:p1、p2、p3为平面上的3个点
输出:Ax+By+Cz+D=0平面方程中的系数
def plane_from_points(p1, p2, p3):# 将点转换为numpy数组,如果已经是数组则不转换a = np.array(p1)b = np.array(p2)c = np.array(p3)# 计算法向量normal = np.cross(b - a, c - a)# 归一化法向量并计算dd = -np.dot(normal, a)print("平面方程: {}x + {}y + {}z + {} = 0".format(normal[0],normal[1],normal[2],d))return normal[0], normal[1], normal[2], d三、确定空间中一点到平面的距离
原理:点到平面距离_百度百科 (baidu.com)
代码:
输入:①平面方程中的4个系数;②待求与平面方程距离的点
输出:点到平面距离
def point2area_distance(Ax, By, Cz, D,p):mod_d = Ax * p[0] + By * p[1] + Cz * p[2] + Dmod_area = np.sqrt(np.sum(np.square([Ax, By, Cz])))d = abs(mod_d) / mod_areareturn d四、完整代码
dataSample = pd.read_excel(r"C:\Users\zsllsz2022\Desktop\坐标分类.xlsx")import numpy as npdef plane_from_points(p1, p2, p3):# 将点转换为numpy数组,如果已经是数组则不转换a = np.array(p1)b = np.array(p2)c = np.array(p3)# 计算法向量normal = np.cross(b - a, c - a)# 归一化法向量并计算dd = -np.dot(normal, a)print("平面方程: {}x + {}y + {}z + {} = 0".format(normal[0],normal[1],normal[2],d))return normal[0], normal[1], normal[2], ddef point2area_distance(Ax, By, Cz, D,p):mod_d = Ax * p[0] + By * p[1] + Cz * p[2] + Dmod_area = np.sqrt(np.sum(np.square([Ax, By, Cz])))d = abs(mod_d) / mod_areareturn dpointData = data = pd.read_excel(r"C:\Users\zsllsz2022\Desktop\剖面坐标点.xlsx")point = []for index in range(63): x = pointData["X"].iloc[index]y = pointData["Y"].iloc[index]z = pointData["Z"].iloc[index]point.append([x,y,z])fileIndex = 1
for x in [3*x for x in range(3,4)]: #range21p1 = point[x]p2 = point[x+1]p3 = point[x+2]a,b,c,d = plane_from_points(p1, p2, p3)dataSample = pd.read_excel(r"C:\Users\zsllsz2022\Desktop\坐标分类.xlsx")classifyIndex = []for index in range(len(dataSample)):xTo = dataSample["Xto"].iloc[index]yTo = dataSample["Yto"].iloc[index]zTo = dataSample["Zto"].iloc[index]toPoint = [xTo,yTo,zTo]xFrom = dataSample["Xfrom"].iloc[index]yFrom = dataSample["Yfrom"].iloc[index]zFrom = dataSample["Zfrom"].iloc[index]fromPoint = [xFrom,yFrom,zFrom]if point2area_distance(a,b,c,d,toPoint) < 5:classifyIndex.append(index)if point2area_distance(a,b,c,d,fromPoint) < 5:classifyIndex.append(index)dataSample = dataSample.iloc[classifyIndex]list_to_append = [np.nan,np.nan,np.nan,np.nan,np.nan,np.nan,np.nan,np.nan,dataSample["Dep2200"].mean(),dataSample["IC"].mean(),dataSample["Pos2200"].mean(),dataSample["Dep2250"].mean(),dataSample["Pos2250"].mean(),dataSample["Dep1900"].mean()]new_row = pd.DataFrame([list_to_append], columns=list(dataSample.columns))dataSample = dataSample.append(new_row,ignore_index=True)print("剖面完成:",fileIndex)dataSample.to_excel(r"C:\Users\zsllsz2022\Desktop\剖面{}.xlsx".format(fileIndex))fileIndex += 1这篇关于三维坐标点按剖面分类的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





