本文主要是介绍OpenCV基本图像处理操作(十)——图像特征harris角点,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
角点
角点是图像中的一个特征点,指的是两条边缘交叉的点,这样的点在图像中通常表示一个显著的几角。在计算机视觉和图像处理中,角点是重要的特征,因为它们通常是图像中信息丰富的区域,可以用于图像分析、对象识别、3D建模等多种应用。
角点的识别可以帮助在进行图像匹配和跟踪时提供稳定的参考点,这是因为角点在图像中的位置比较容易通过算法检测出来,且不易受到视角变化的影响。因此,角点检测在视觉系统中非常重要,如机器人导航、增强现实等领域中都有广泛应用。
图像特征-harris角点检测
Harris 角点检测是一种流行的角点检测算法,用于从图像中识别出角点的位置,即图像中两条边交叉的特征点。这些特征点在图像匹配、追踪、计算机视觉等领域中非常有用。
算法原理
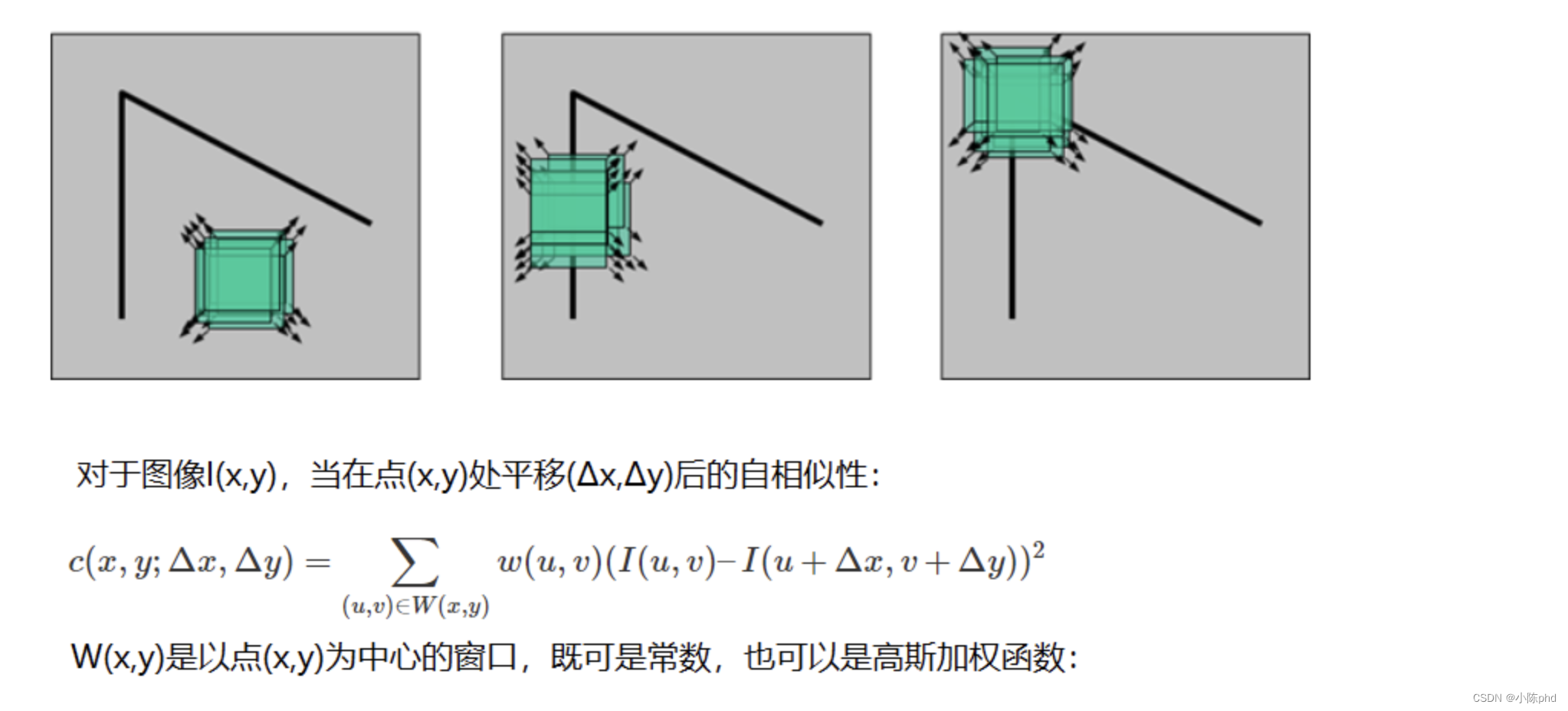
算法的基本思想是检测图像中灰度强度的局部变化非常显著的点。具体来说,Harris 角点检测器会对图像进行窗口滑动,计算窗口内每个点移动小量后对应的灰度变化量。这些变化量通过一个数学公式进行计算,其中包括图像的梯度、梯度的协方差矩阵以及这些矩阵的迹和行列式。
最终,通过一个响应函数的计算,可以评估每个点是否为角点。如果响应函数的值超过某个阈值,则该点被认为是角点。
Harris 角点检测器的优点在于它对图像旋转保持不变性,并且对噪声有一定的抵抗力,但可能对图像尺度的变化敏感。
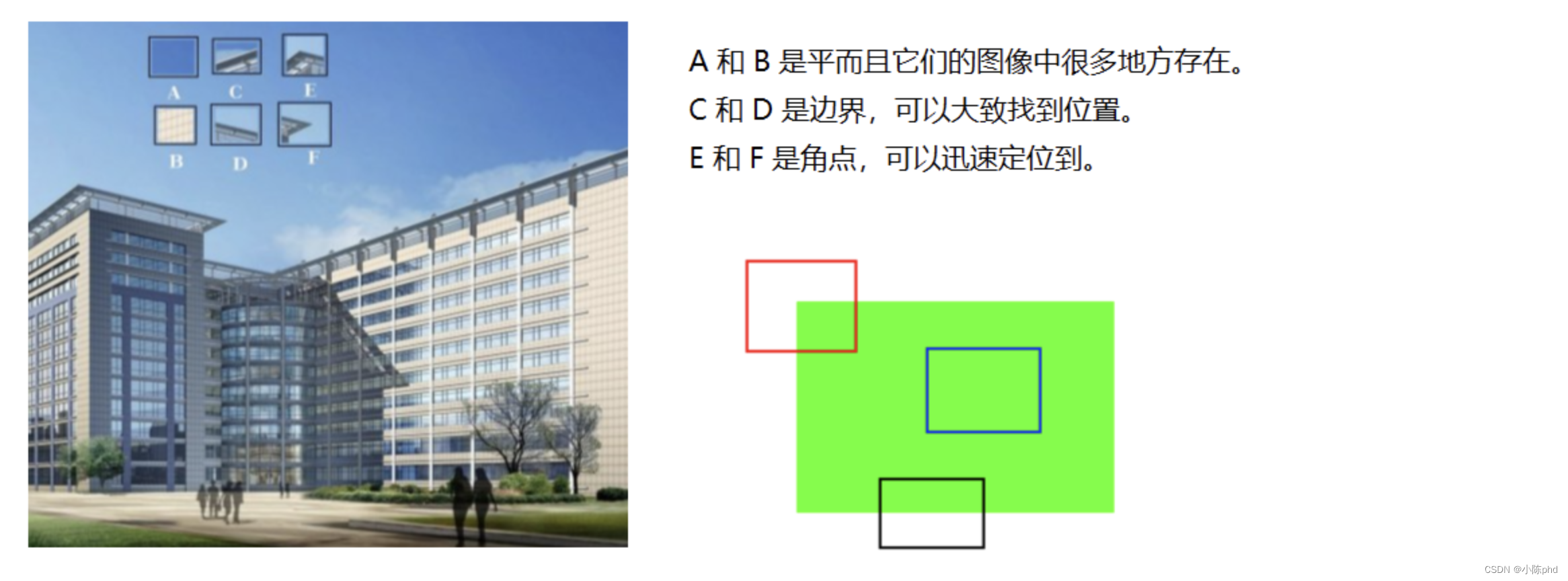
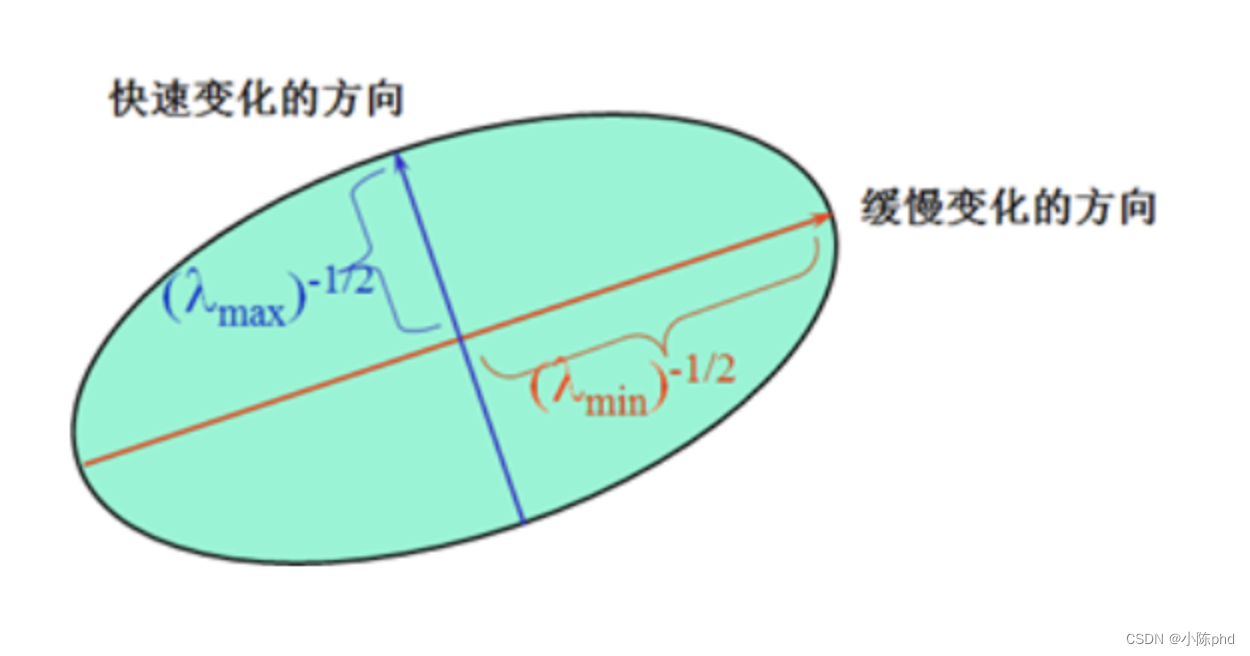

Harris 角点检测是一种在图像中识别角点的流行算法。其核心思想是通过测量图像窗口在各个方向上移动时产生的度变化程度来识别角点。
Harris 角点检测原理:
Harris 角点检测算法基于这样一个观察:一个窗口如果在图像中的角点上移动,窗口内像素强度的变化将会很大。算法通过构建一个结构张量(也称为二阶矩阵)来量化这种变化,该矩阵反映了图像窗口内强度的变化情况。
数学表示:
-
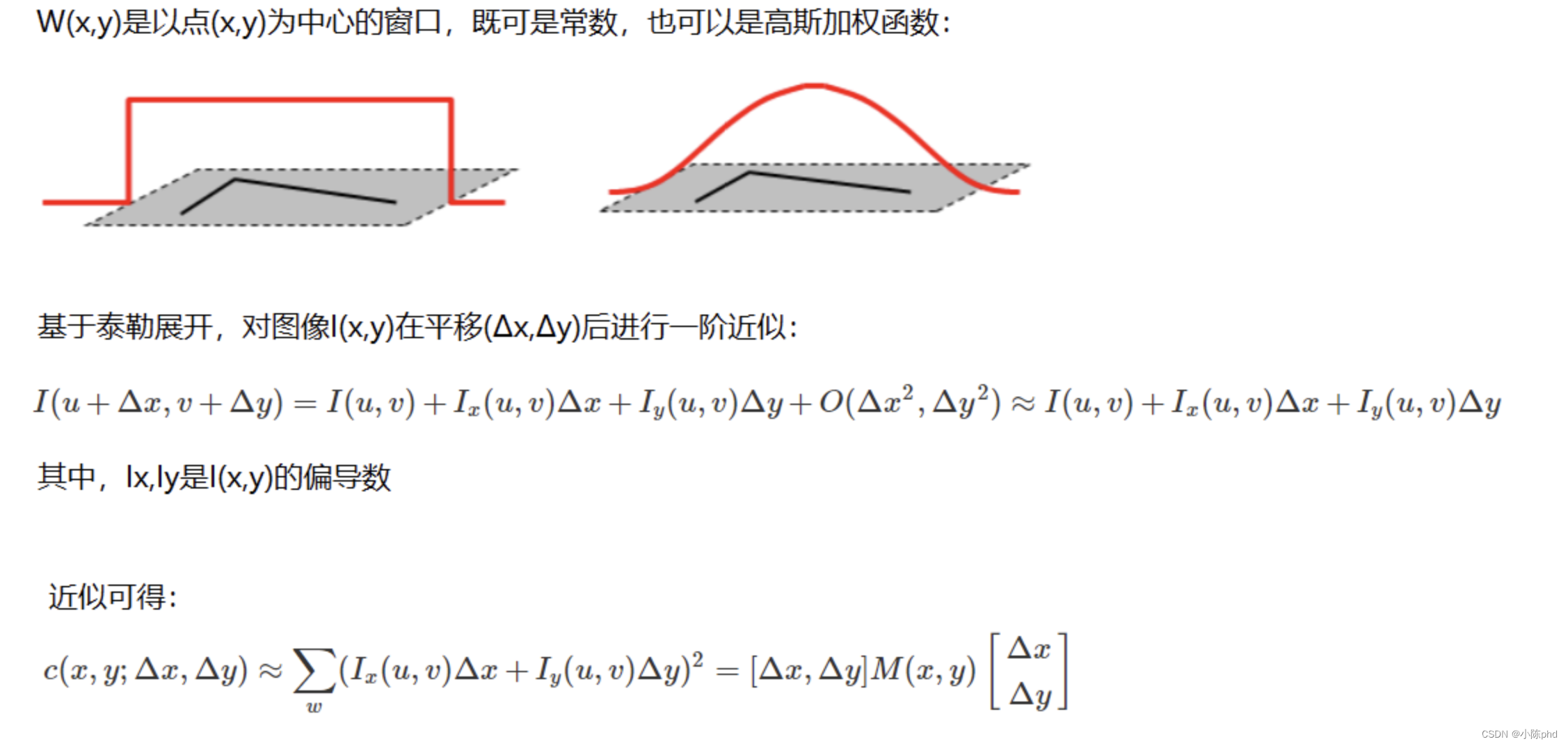
计算图像梯度:首先计算图像的梯度 I x I_x Ix, I y I_y Iy,这里 I x I_x Ix 和 I y I_y Iy 分别是图像在 x 方向和 y 方向的一阶导数。
-
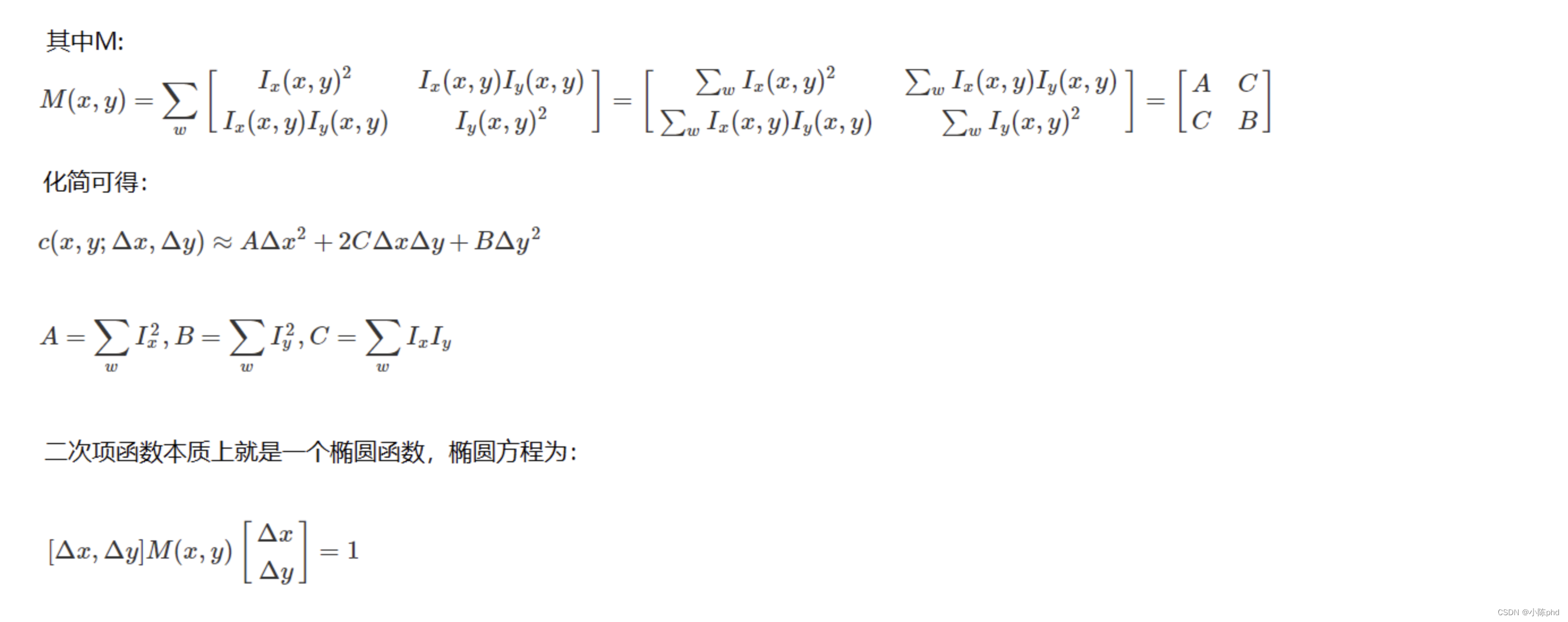
构建结构张量:接着计算图像在每一点的结构张量 M M M,其由以下公式定义:
M = ∑ x , y w ( x , y ) [ I x 2 I x I y I x I y I y 2 ] \ M = \sum_{x, y} w(x, y) \begin{bmatrix} I_x^2 & I_x I_y \\ I_x I_y & I_y^2 \end{bmatrix} \ M=x,y∑w(x,y)[Ix2IxIyIxIyIy2]其中, w ( x , y ) w(x, y) w(x,y) 是窗口函数,常用的是高斯窗口。
-
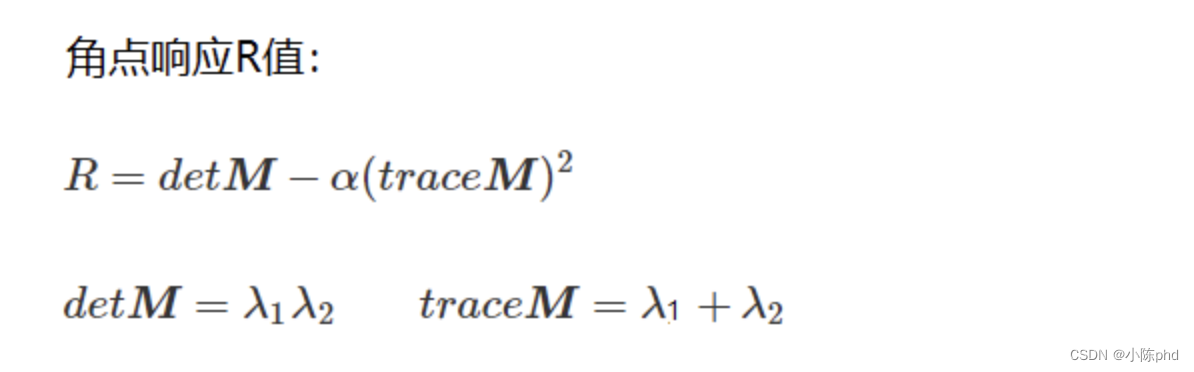
响应函数计算:Harris 响应函数 ( R ) 由下面的公式给出:
R = det ( M ) − k ⋅ ( trace ( M ) ) 2 \ R = \det(M) - k \cdot (\text{trace}(M))^2 \ R=det(M)−k⋅(trace(M))2
其中, det ( M ) = λ 1 λ 2 \det(M) = \lambda_1 \lambda_2 det(M)=λ1λ2 是 ( M ) 的行列式(即特征值的乘积), trace ( M ) = λ 1 + λ 2 \text{trace}(M) = \lambda_1 + \lambda_2 trace(M)=λ1+λ2是 M M M 的迹(即特征值的和), k k k 是一个经验参数,通常取值在 0.04 到 0.06 之间。 -
角点检测:如果 R R R 的值大于某个阈值,那么该点被认为是角点。
代码实战
gray: 这是输入图像,应该是灰度图像,因为 Harris 角点检测通常在灰度图像上进行。2: 这是块大小(blockSize),即用于计算每个像素点的 Harris 响应值的邻域大小。这里的值2指的是考虑每个点周围 2x2 的窗口。3: 这是用于梯度计算的 Sobel 算子的孔径大小(apertureSize)。孔径大小为 3 意味着使用 3x3 的 Sobel 算子来计算图像的 x 方向和 y 方向的导数。0.04: 这是 Harris 角点检测算法中的自由参数 ( k )。该参数用于在响应函数 ( R ) 中平衡角点的度量,通常取值在 0.04 到 0.06 之间。
该函数的输出是一个灰度图像,其中每个像素的值代表该点作为角点的可能性。角点的位置通常是响应图中值较高的区域。在实际应用中,可能还需要进一步的步骤来阈值化和局部极大值抑制,以准确确定和标记角点的位置。
import cv2
import numpy as npimg = cv2.imread('test_1.jpg')
print ('img.shape:',img.shape)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# gray = np.float32(gray)
dst = cv2.cornerHarris(gray, 2, 3, 0.04)
print ('dst.shape:',dst.shape)
img[dst>0.01*dst.max()]=[0,0,255]
cv2.imshow('dst',img)
cv2.waitKey(0)
cv2.destroyAllWindows()
这篇关于OpenCV基本图像处理操作(十)——图像特征harris角点的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






