本文主要是介绍(3)(3.1) 英特尔Realsense深度摄像头(三),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
前言
10 系统概述
11 手动设置配套计算机
前言
本文介绍如何将英特尔 Realsense 深度摄像头(Intel Realsense Depth Camera)与 ArduPilot 配合使用,以实现避障(obstacle avoidance)。该方法使用在配套计算机上运行的 Python 脚本(非 ROS)向 ArduPilot 发送距离信息。
10 系统概述
简而言之,该脚本会将 Realsense 深度摄像头提供的深度图像转换成与前方障碍物的距离。AP 支持 DISTANCE_SENSOR 和 OBSTACLE_DISTANCE MAVLink 消息,前者携带单个距离,后者携带距离数组。OBSTACLE_DISTANCE 允许我们同时发送多达 72 个距离,因此我们将使用它。
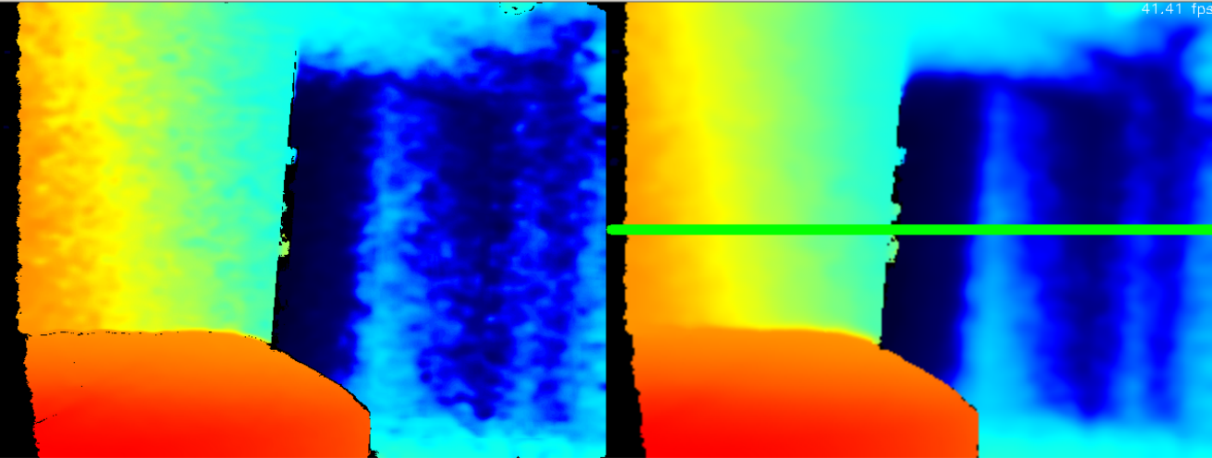
- 首先,必须对原始深度图像应用某种形式的滤波器,以避免黑洞和噪音,并改进数据以获得更稳定的结果。以下是脚本中包含的滤镜的完整列表(list of filters),你可以单独启用这些滤镜。要测试不同滤镜的设置,可以使用 librealsense 提供的 rs-depth-quality 示例或运行 opencv_depth_filtering.py 示例脚本。下图展示了原始(左)和过滤后(右)的深度图像,水平线是我们计算与障碍物距离的位置;
- 接下来,从输入/处理后的深度图像来看,由于信息中没有区分不同俯仰角度的区域,因此距离需要在同一水平线上(如右图所示)。我们将摄像头的水平视场划分为 72 条均匀分布的光线。沿着每条射线,我们选择与射线末端相对应的像素,并提取出深度值;
- 随后,当飞行器上下俯仰时,障碍物线将通过补偿飞行器当前俯仰(由 MAVLink 的ATTITUDE 信息提供)保持"固定";
- 最后,发送信息的频率应在 10Hz 或更高,这取决于飞行器的行驶速度。
11 手动设置配套计算机
只有在尚未将 APSync 安装到配套计算机的情况下,才需要执行这些步骤。
用于配套电脑:
- 操作系统:Ubuntu 18.04(强烈建议使用此版本,因为该版本包含最新的所需库);
- Python 3.6 及以上版本,这也是 Ubuntu 18.04 的标准版本。使用 $ python3 -V 查看版本,应该能看到 Python 3.6.9 或更高版本;
- librealsense:从官方资源(official source)下载或安装;
- pyrealsense2 也是必需的。
不同系统的安装过程有很大差异,因此请参考 github 官方页面(the official github page),了解具体系统的安装说明:
- Ubuntu
- Jetson
- Odroid
- Windows
- Raspbian
安装支持软件包
首先为 Ubuntu 安装 Python3(Python3 for Ubuntu)(Ubuntu 18.04 及以上版本无需安装)。然后使用 Python3命令运行英特尔提供的示例,这些示例位于 ~/librealsense/wrappers/python/examples 文件夹中。
# Update the PYTHONPATH environment variable to add the path to the pyrealsense2 library
export PYTHONPATH=$PYTHONPATH:/usr/local/lib
cd ~/librealsense/wrappers/python/examples
# You should see a stream of depth data coming from the D4xx camera.
python3 python-tutorial-1-depth.py
安装 Python3 的 pip (pip3) 和其他支持软件包:
sudo apt-get install python3-pip
pip3 install pyrealsense2
pip3 install transformations
pip3 install dronekit
pip3 install apscheduler
pip3 install pyserial # For serial connection
pip3 install opencv-python
sudo apt -y install python3-gst-1.0 gir1.2-gst-rtsp-server-1.0 gstreamer1.0-plugins-base gstreamer1.0-plugins-ugly libx264-dev
# Only necessary if you installed the minimal version of Ubuntu
sudo apt install python3-opencv
下载主脚本 d4xx_to_mavlink.py,或克隆 vision_to_mavros 软件源并找到脚本文件夹。
cd /path/to/download # Or ROS workspace ~/catkin_ws/src
git clone https://github.com/thien94/vision_to_mavros.git
cd vision_to_mavros/script
chmod +x d4xx_to_mavlink.py
chmod +x opencv_depth_filtering.py # Useful to test the filtering options
与 AP 一起使用的主要脚本是 d4xx_to_mavlink.py。第二个脚本 opencv_depth_filtering.py可用于在闲暇时测试不同的过滤选项。
修改脚本
如果没有插入监视器,可通过设置 debug_enable_default = False 禁用脚本 d4xx_to_mavlink.py 中的调试选项,或在运行脚本时添加参数 --debug_enable 0:
1. 用以下命令运行脚本。
cd /path/to/script
python3 d4xx_to_mavlink.py
2. 如果启用了调试选项,请等待显示输入和处理后的深度图像。在右上角可以看到处理速度(帧/秒)。输出图像(右侧)上的水平线表示我们找到的与摄像机前方障碍物距离的直线。
设置摄像机 RGB 图像的视频馈送:
1. 脚本 d4xx_to_mavlink.py 有一个选项 RTSP_STREAMING_ENABLE。如果启用(True),Realsense 摄像机的 RGB 图像视频流将在 rtsp://<ip-address>:8554/d4xx 和 UP2 / 配套计算机的 <ip-address> 上提供。
2. 在 Mission Planner 中:右键单击 HUD > 视频 > 设置 GStreamer 源,这将打开 Gstreamer url 窗口。将以下示例管道输入 Gstreamer url 窗口。相应更改 <ip-address>:
rtspsrc location=rtsp://<ip-address>:8554/d4xx caps=“application/x-rtp, media=(string)video, clock-rate=(int)90000, encoding-name=(string)H264” latency=100 ! queue ! rtph264depay ! avdec_h264 ! videoconvert ! video/x-raw,format=BGRA ! appsink name=outsink
3. 视频传输的延迟取决于网络和管道配置,因此请随时调整/修改参数。
由于深度摄像头在不同设置/环境下的性能各不相同,建议在实际飞行前进一步调整脚本设置。以下是根据系统实际实验所做的一些改进:
1. 当飞行器在地面上时,深度图像的大部分可能会看到地面。在这种情况下,可在 d4xx_to_mavlink.py 脚本中减小 obstacle_line_height_ratio参数(接近零),以向上移动障碍物检测线。
2. 如果深度数据有噪声,可以通过修改obstacle_line_thickness_pixel参数来增加障碍物线的厚度。在撰写本文时,我们的想法是处理某个边界(由该参数定义)内的一组像素,并找出最低值作为物体的指示器。如果将来开发出更好的方案,这一点可以改变。
!Tip
深度摄像头可与 Realsense T265 跟踪摄像头一起用于非 GPS 导航(Realsense T265 Tracking camera for non-GPS navigation)。有一些支持脚本(scripts)可以简化同时使用多个摄像头的过程。
这篇关于(3)(3.1) 英特尔Realsense深度摄像头(三)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



