本文主要是介绍Stable Diffusion扩散模型【详解】小白也能看懂!!,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 1、Diffusion的整体过程
- 2、加噪过程
- 2.1 加噪的具体细节
- 2.2 加噪过程的公式推导
- 3、去噪过程
- 3.1 图像概率分布
- 4、损失函数
- 5、 伪代码过程
此文涉及公式推导,需要参考这篇文章: Stable Diffusion扩散模型推导公式的基础知识
1、Diffusion的整体过程
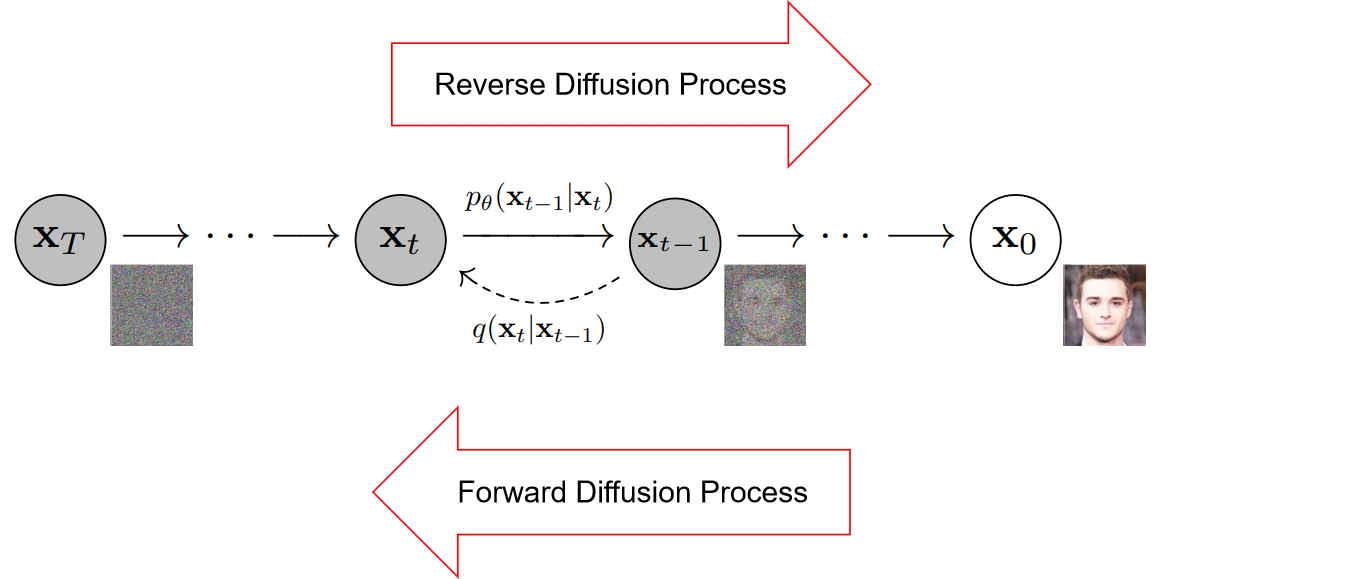
扩散过程是模拟图像加噪的逆向过程,也就是实现去噪的过程,
加噪是如下图从右到左的过程,称为反向扩散过程,
去噪是从左往右的过程,称为前向扩散过程,
2、加噪过程
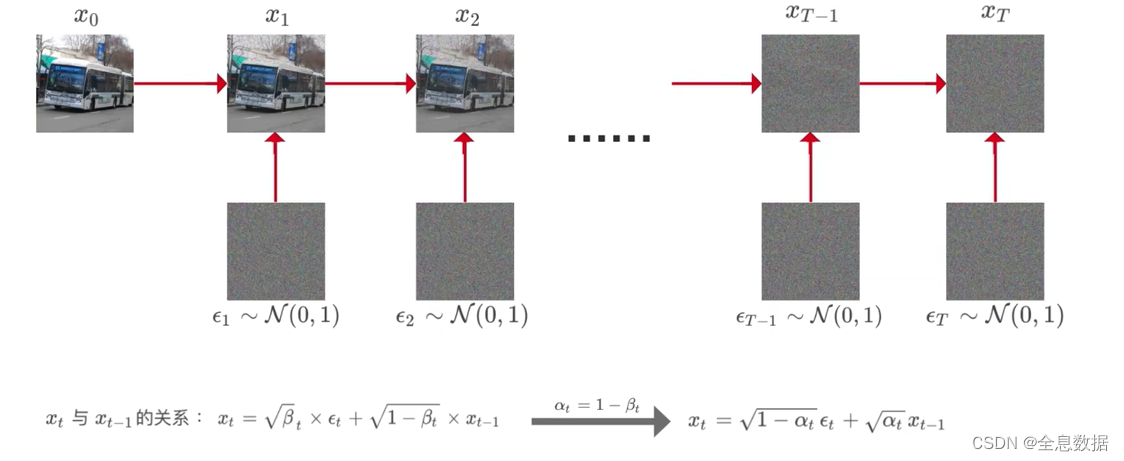
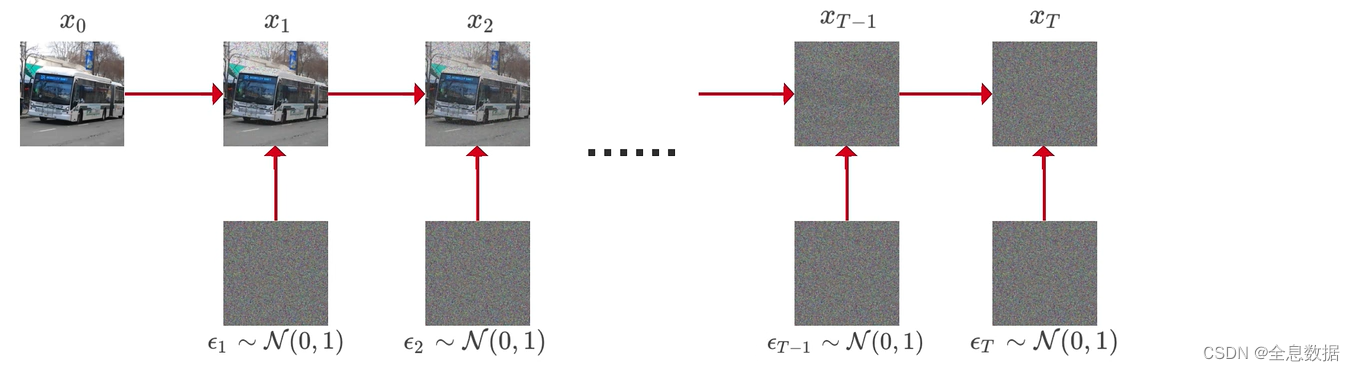
加噪过程如下图,下一时刻的图像是在上一时刻图像的基础上加入噪音生成的,
图中公式的含义: x t x_t xt表示 t 时刻的图像, ϵ t \epsilon_t ϵt 表示 t 时刻生成的随机分布的噪声图像, β t \beta_t βt表示 t 时刻指定的常数,不同时刻的 β t \beta_t βt不同,随着时间 t 的递增而增加,但需要注意 β t \beta_t βt的值始终是比较小的,因为要让图像的数值占较大的比例,
2.1 加噪的具体细节
A、将图像 x x x像素值映射到[-1,1]之间
图像加噪不是在原有图像上进行加噪的,而是通过把图片的每个像素的值转换为-1到1之间,比如像素的值是 x x x,则需要经过下面公式的处理 x 255 × 2 − 1 \frac{x}{255}\times2-1 255x×2−1,转换到范围是-1到1之间,
代码:
def get_transform():class RescaleChannels(object):def __call__(self, sample):return 2 * sample - 1return torchvision.transforms.Compose([torchvision.transforms.ToTensor(), RescaleChannels()])
B、生成一张尺寸相同的噪声图片,像素值服从标准正态分布
ϵ ∼ N ( 0 , 1 ) \epsilon \sim N(0,1) ϵ∼N(0,1)
x = {Tensor:(2, 3, 32, 32)}
noise = torch.randn_like(x)
C、 α \alpha α和 β \beta β
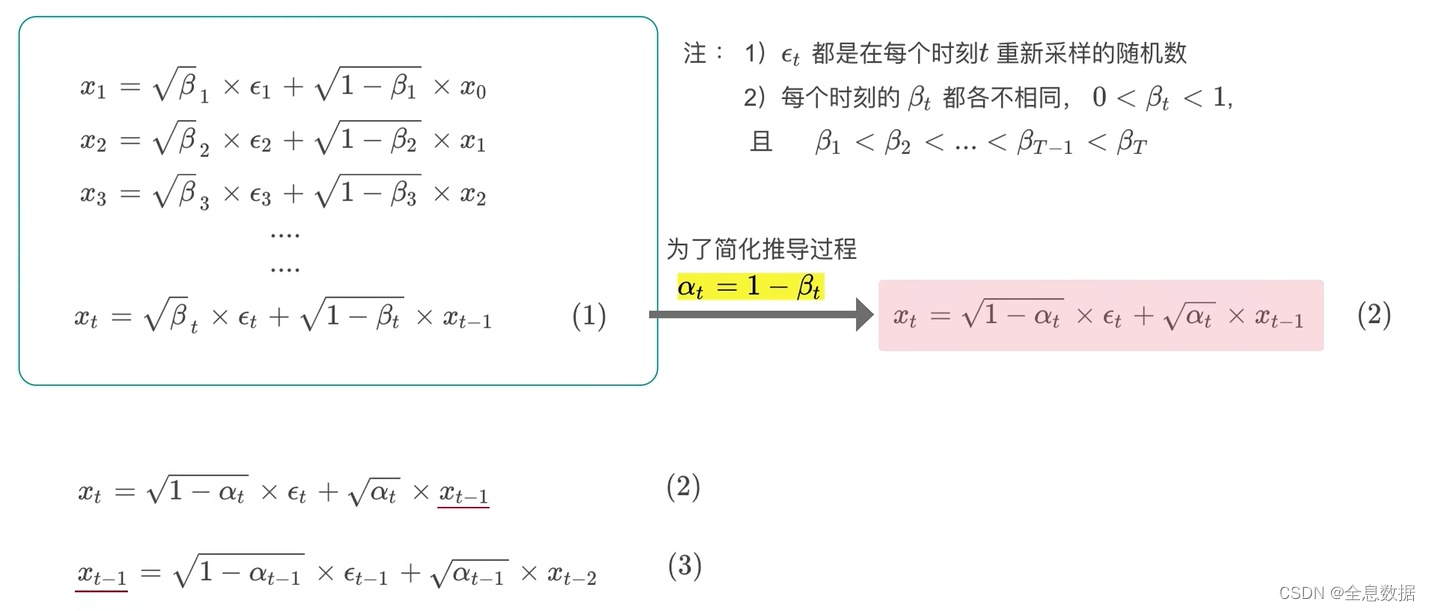
每个时刻的 β t \beta_t βt都各不相同,0 < β t \beta_t βt< 1,因为 β t \beta_t βt是作为权重存在的,且 β 1 < β 2 < β 3 < β T − 1 < β T \beta_1< \beta_2< \beta_3< \beta_{T-1}< \beta_T β1<β2<β3<βT−1<βT,
代码:
betas = generate_linear_schedule(args.num_timesteps,args.schedule_low * 1000 / args.num_timesteps,args.schedule_high * 1000 / args.num_timesteps)
β \beta β的取值代码,比如 β 1 \beta_1 β1取值low, β T \beta_T βT取值high,
# T:1000 Low/β1: 0.0001 high/βT: 0.02
def generate_linear_schedule(T, low, high):return np.linspace(low, high, T)
α t = 1 − β t \alpha_t=1-\beta_t αt=1−βt,alphas = 1.0 - betas
alphas = 1.0 - betas
alphas_cumprod = np.cumprod(alphas)
to_torch = partial(torch.tensor, dtype=torch.float32)
self.registerbuffer("betas", totorch(betas))
self.registerbuffer("alphas", totorch(alphas))
self.register_buffer("alphas_cumprod", to_torch(alphas_cumprod))
self.register_buffer("sqrt_alphas_cumpnod", to_torch(np.sqrt(alphas_cumprod)))
self.register_buffer("sart_one_minus_alphas_cumprod", to_torch(np.sqrt(1 - alphas_cumprod)))
self.registerbuffer("reciprocal sart_alphas", totorch(np.sart(1 / alphas)))
self.register_buffer("remove_noise_coeff", to_torch(betas / np.sqrt(1 - alphas_cumprod)))
self.registerbuffer("siqma",to_torch(np.sqrt(betas)))
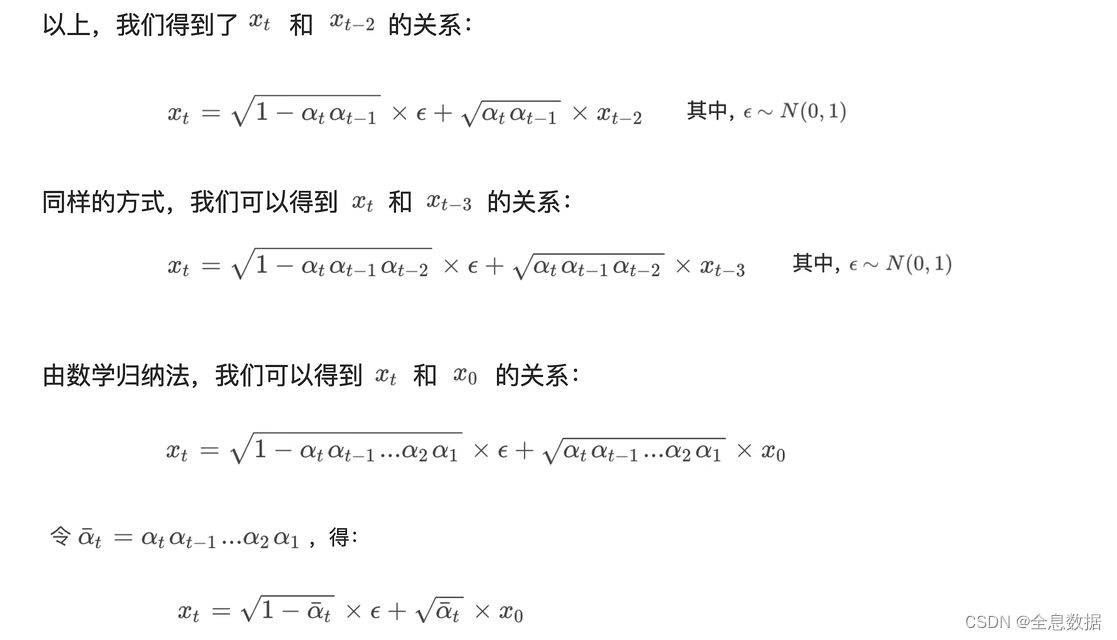
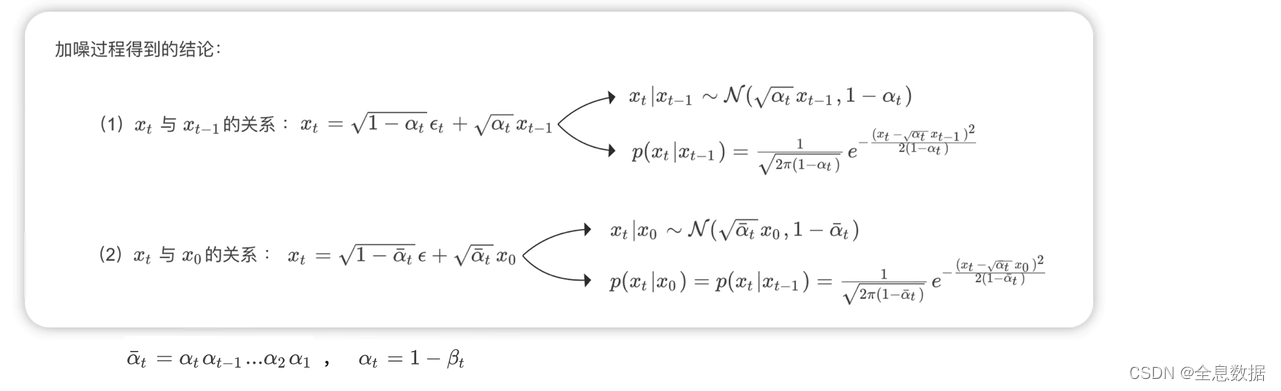
D、任一时刻的图像 x t x_t xt都可以由原图像 x 0 x_0 x0直接生成(可以由含 x 0 x_0 x0的公式直接表示)
x t x_t xt与 x 0 x_0 x0的关系: x t = 1 − α t ‾ ϵ + α t ‾ x 0 x_t=\sqrt{1-\overline{\alpha_t}}\epsilon+\sqrt{\overline{\alpha_t}}x_0 xt=1−αtϵ+αtx0, α t = 1 − β t \alpha_t=1-\beta_t αt=1−βt, α t ‾ = α t α t − 1 . . . α 2 α 1 \overline{\alpha_t}=\alpha_t\alpha_{t-1}...\alpha_2\alpha_1 αt=αtαt−1...α2α1
由上式可知, β t \beta_t βt是常数,则 α t \alpha_t αt, 1 − α t ‾ \sqrt{1-\overline{\alpha_t}} 1−αt, α t ‾ \sqrt{\overline{\alpha_t}} αt也是常数, ϵ \epsilon ϵ也是已知的,所以可以直接由 x 0 x_0 x0生成 x t x_t xt,
def perturb_x(self, x, t, noise):return (extract(self.sqrt_alphas_cumprod, t, x.shape) * x +extract(self.sqrt_one_minus_alphas_cumprod, t, x.shape) * noise)
def extract(a, t, x_shape):b, *_ = t.shapeout = a.gather(-1, t)return out.reshape(b, *((1,) * (len(x_shape) - 1)))
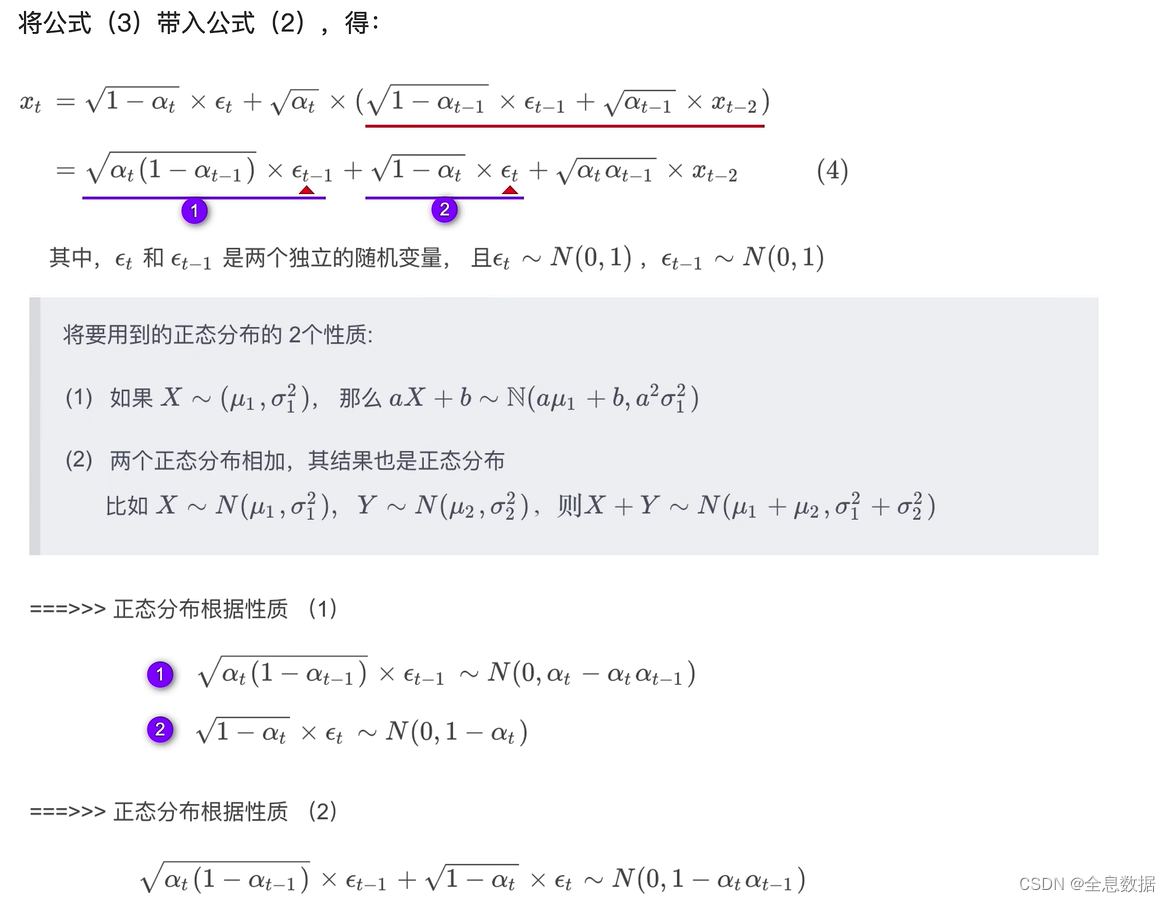
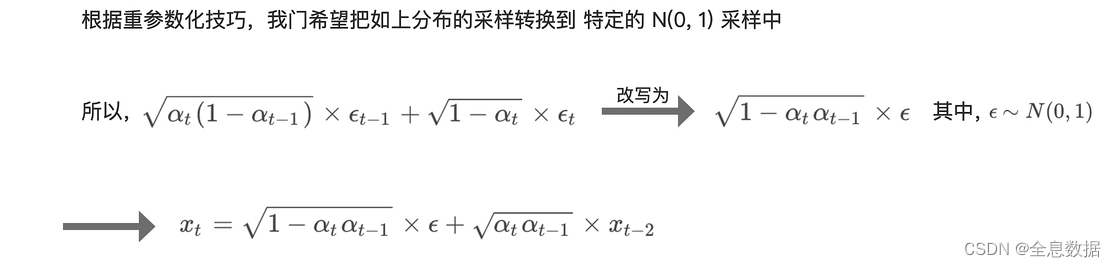
2.2 加噪过程的公式推导
加噪过程:
加噪过程的公式:
总结:
3、去噪过程
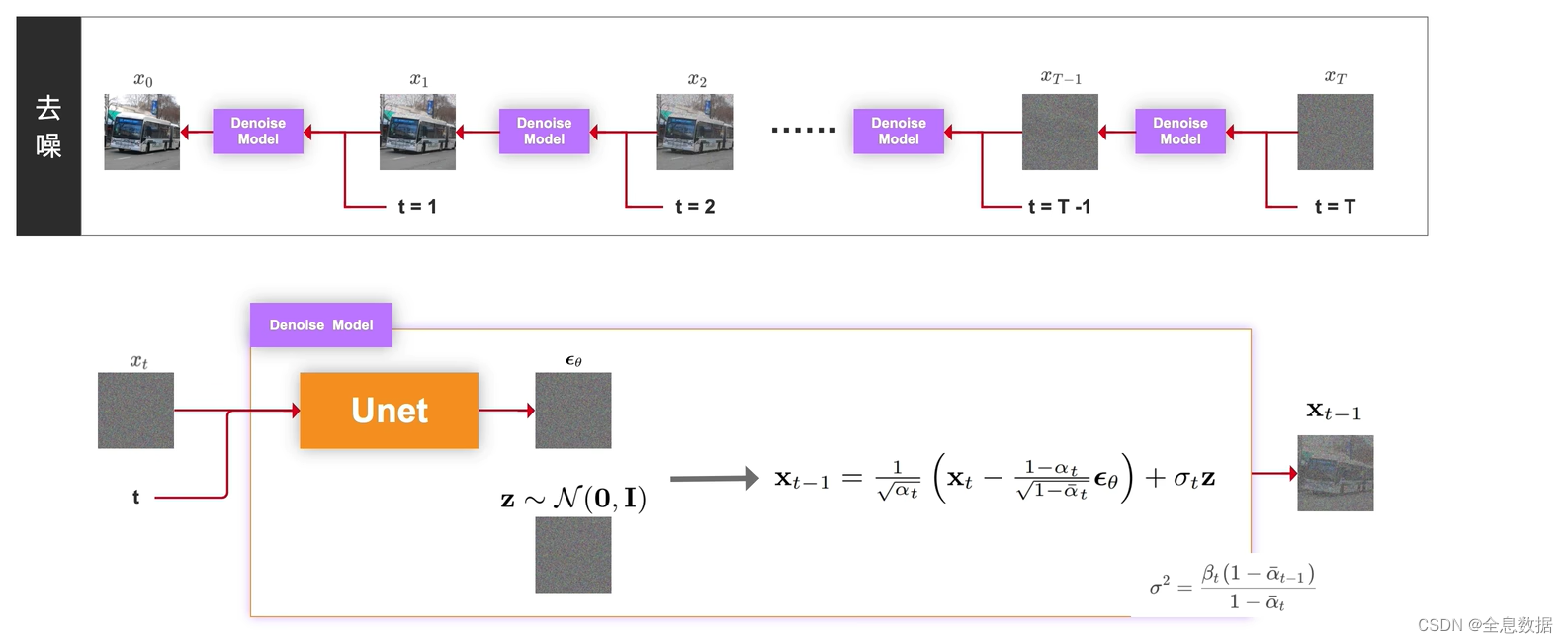
去噪是加噪的逆过程,由时间T时刻的图像逐渐去噪到时刻为0的图像,
下面介绍一下由时刻为T的图像 x T x_T xT去噪到时刻为T-1的图像 x T − 1 x_{T-1} xT−1,输入为时刻为t的图像 x t x_t xt和时刻t,喂给Unet网络生成 ϵ θ \epsilon_\theta ϵθ,其中 θ \theta θ是Unet网络的所有参数,然后由下图中的 x t − 1 {\bf x}_{t-1} xt−1的公式即可生成时刻为t-1的图像 x t − 1 {\bf x}_{t-1} xt−1,
3.1 图像概率分布
去噪过程的2个假设:
(1)加噪过程看作马尔可夫链,假设去噪过程也是马尔可夫链,
(2)假设去噪过程是高斯分布,

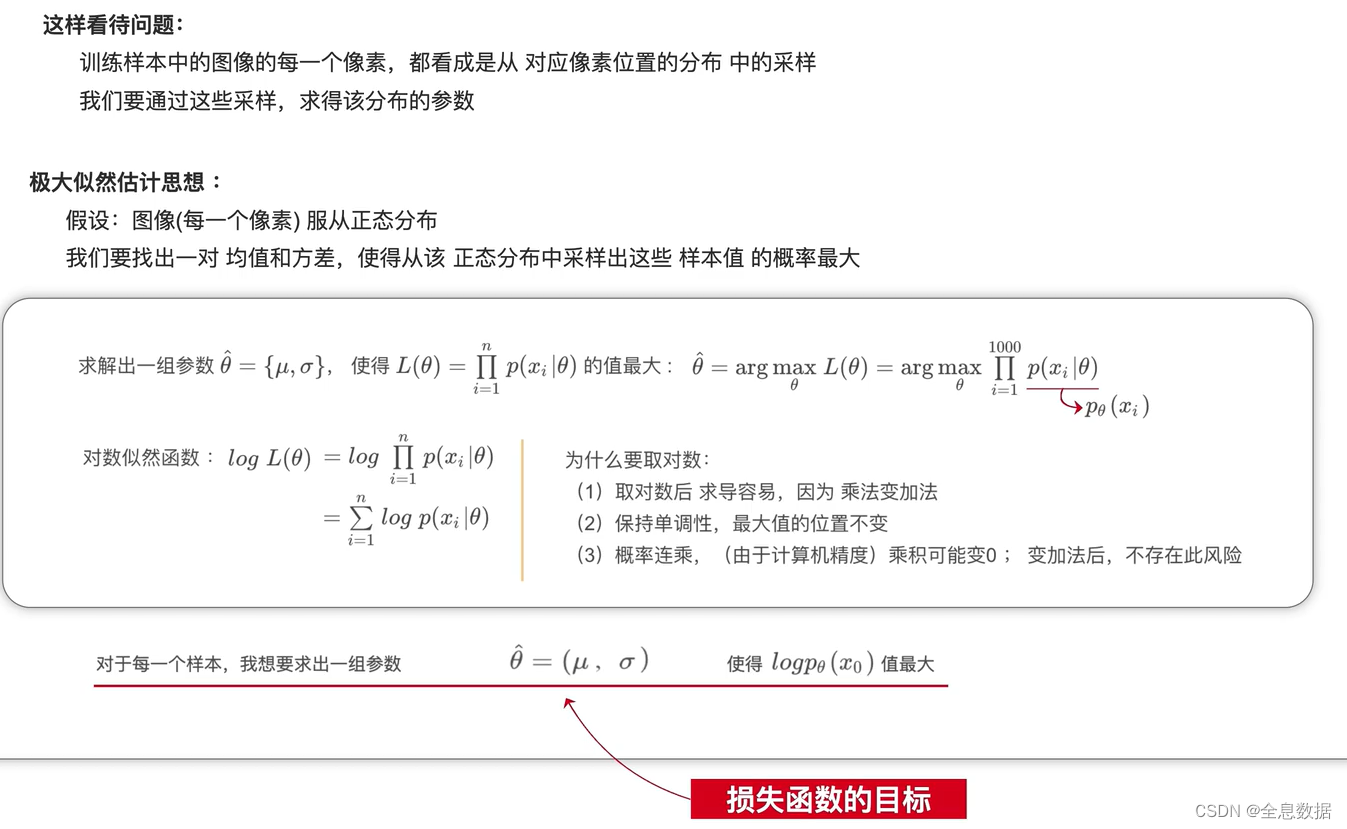
假设数据集中有100张图片,每张图片的shape是4x4x3,假设每张图片的每个channel的每个像素点都服从正态分布, x t − 1 x_{t-1} xt−1的正态分布的均值 μ \mu μ 和方差 σ 2 \sigma^2 σ2 只和 x t x_t xt有关,已知在t时刻的图像,求t-1时刻的图像,

1、因为均值和方差 μ ( x t ) \mu(x_t) μ(xt), σ 2 ( x t ) \sigma^2(x_t) σ2(xt) 无法求出,所以我们决定让网络来帮我们预测均值和方差,
2、因为每一个像素都有自己的分布,都要预测出一个均值和方差,所以网络输出的尺寸需要和图像尺寸一致,所以我们选用 Unet 网络,
3、作者在论文中表示,方差并不会影响结果,所以网络只要预测均值就可以了,
4、损失函数
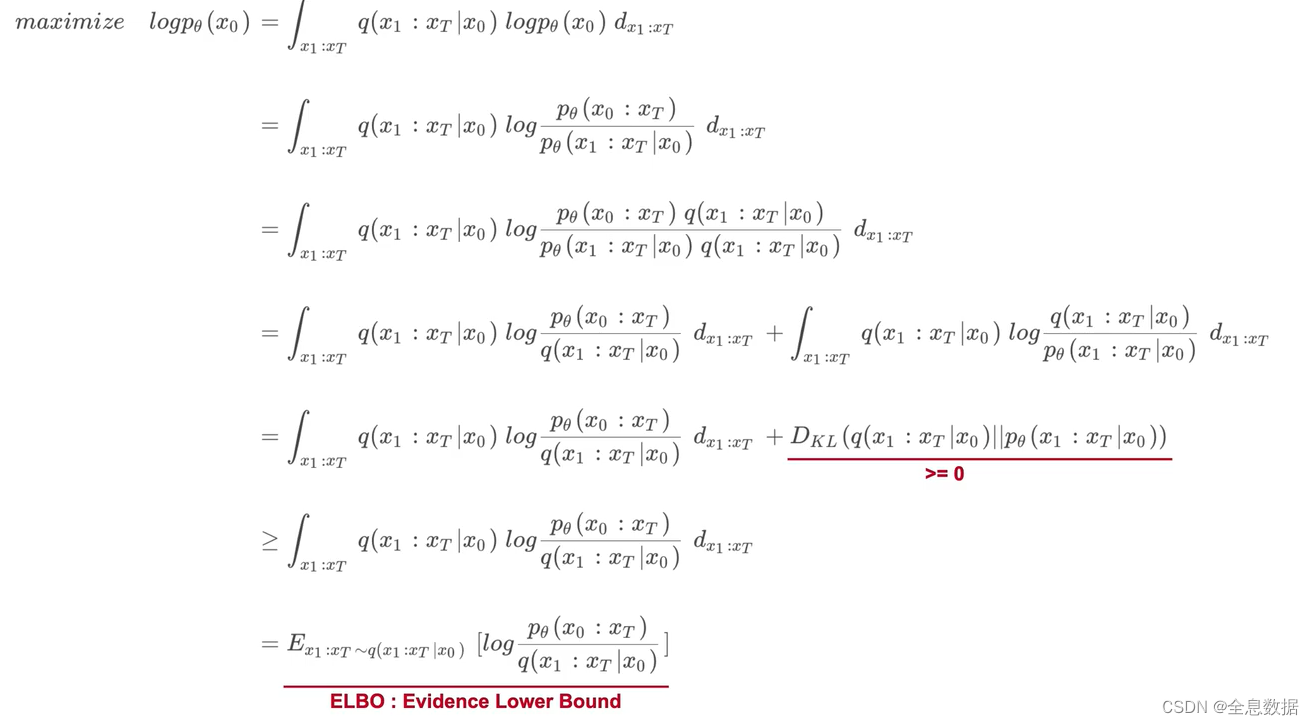
我们要求极大似然的最大值,需要对 μ \mu μ和 σ \sigma σ求导,但是对于扩散的过程是不可行的,如下面的公式无法求出,因为 x 1 : x T x_1:x_T x1:xT的不同组合所求出的 x 0 x_0 x0的值也不同,
p ( x 0 ) = ∫ x 1 : x T p ( x 0 ∣ x 1 : x T ) d x 1 : x T p(x_0)=\int_{x_1:x_T}p(x_0|x_1:x_T)d_{x_1:x_T} p(x0)=∫x1:xTp(x0∣x1:xT)dx1:xT
为了实现对极大似然函数的求导,把对极大似然求导的问题转换为ELBO :Evidence Lower Bound
对ELBO的公式继续进行化简,
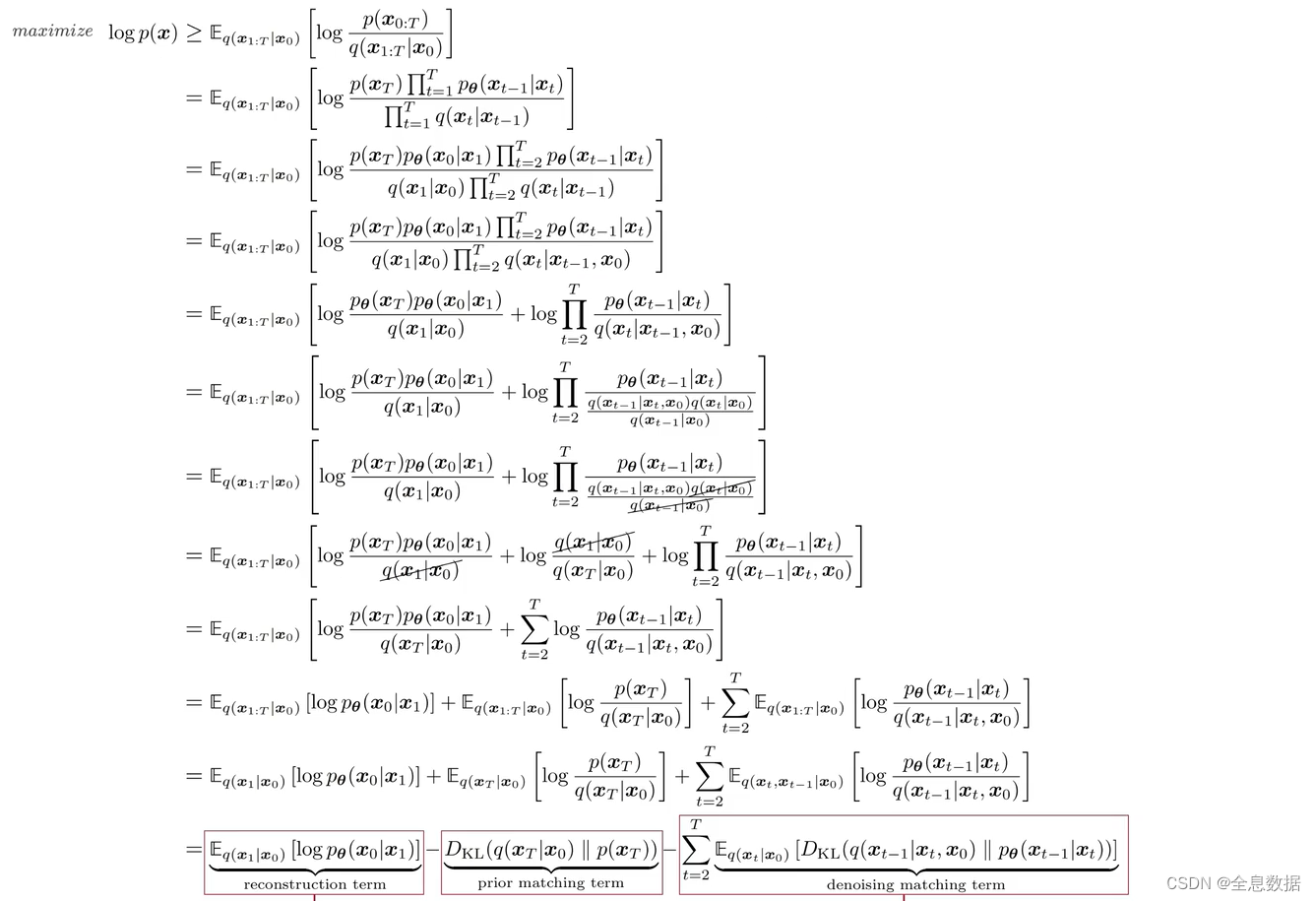
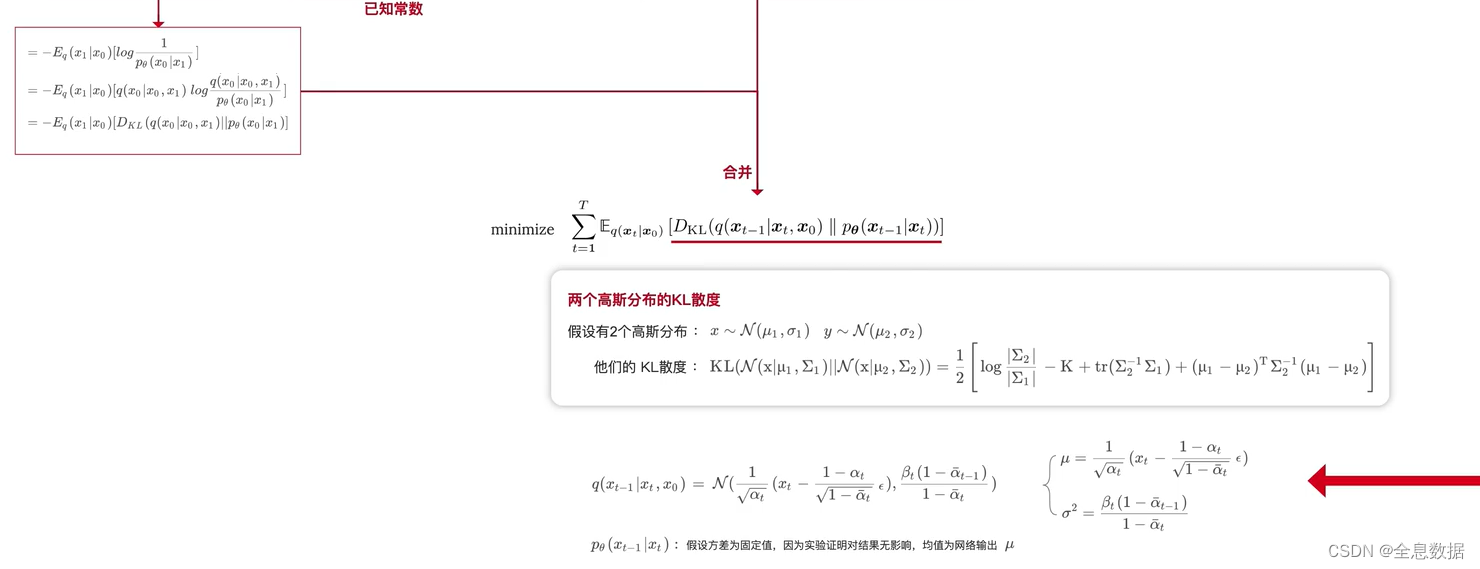
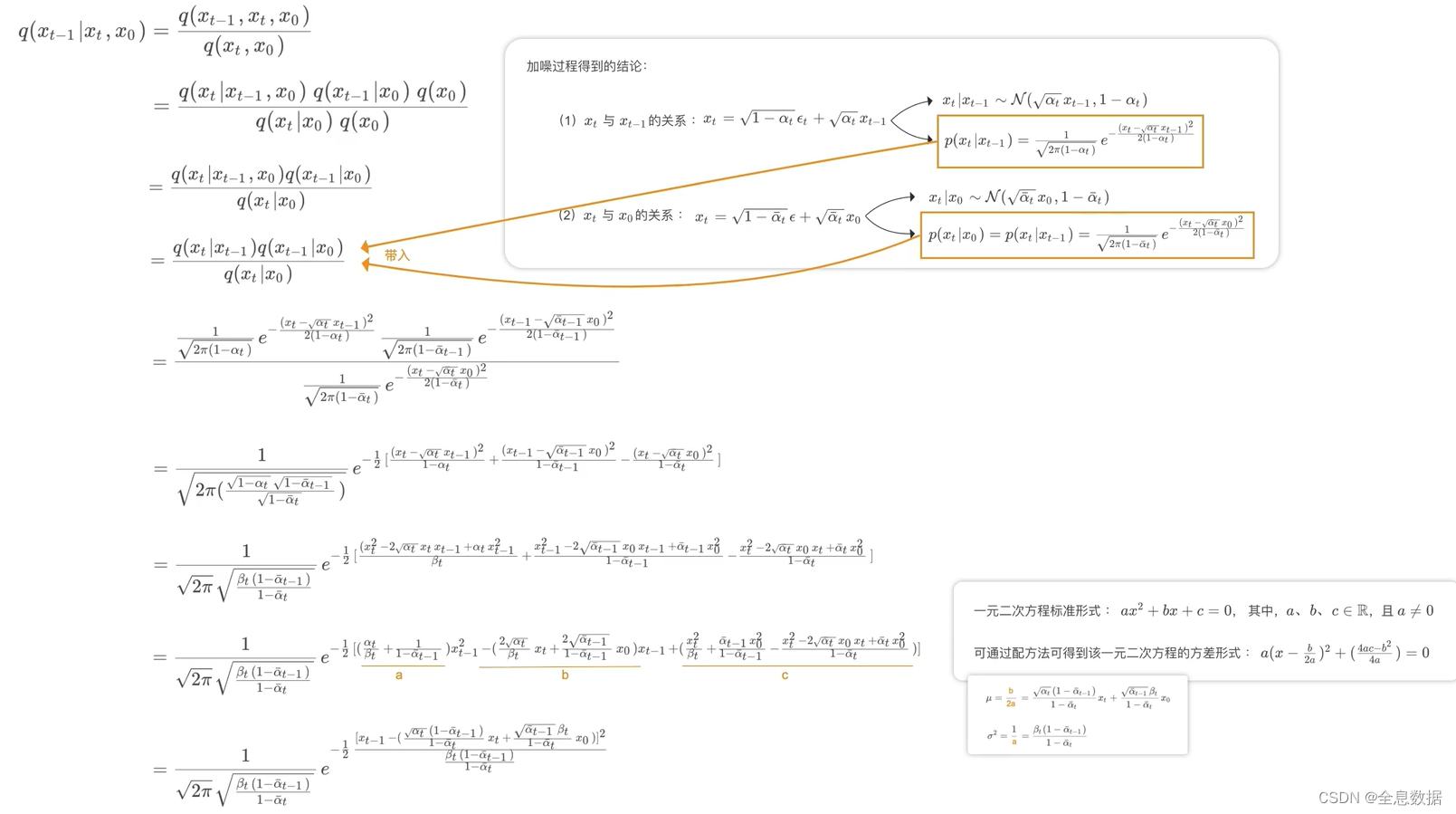
首先来看 q ( x t − 1 ∣ x t , x 0 ) q(x_{t-1}|x_t,x_0) q(xt−1∣xt,x0)表示已知 x 0 x_0 x0和 x t x_t xt的情况下推导 x t − 1 x_{t-1} xt−1,这个公式是可以求解的,如上图公式推导; p θ ( x t − 1 ∣ x t ) p_{\theta}(x_{t-1}|x_t) pθ(xt−1∣xt)需要使用 Unet 预测出该分布的均值,
q ( x t − 1 ∣ x t , x 0 ) q(x_{t-1}|x_t,x_0) q(xt−1∣xt,x0)公式的推导如下:
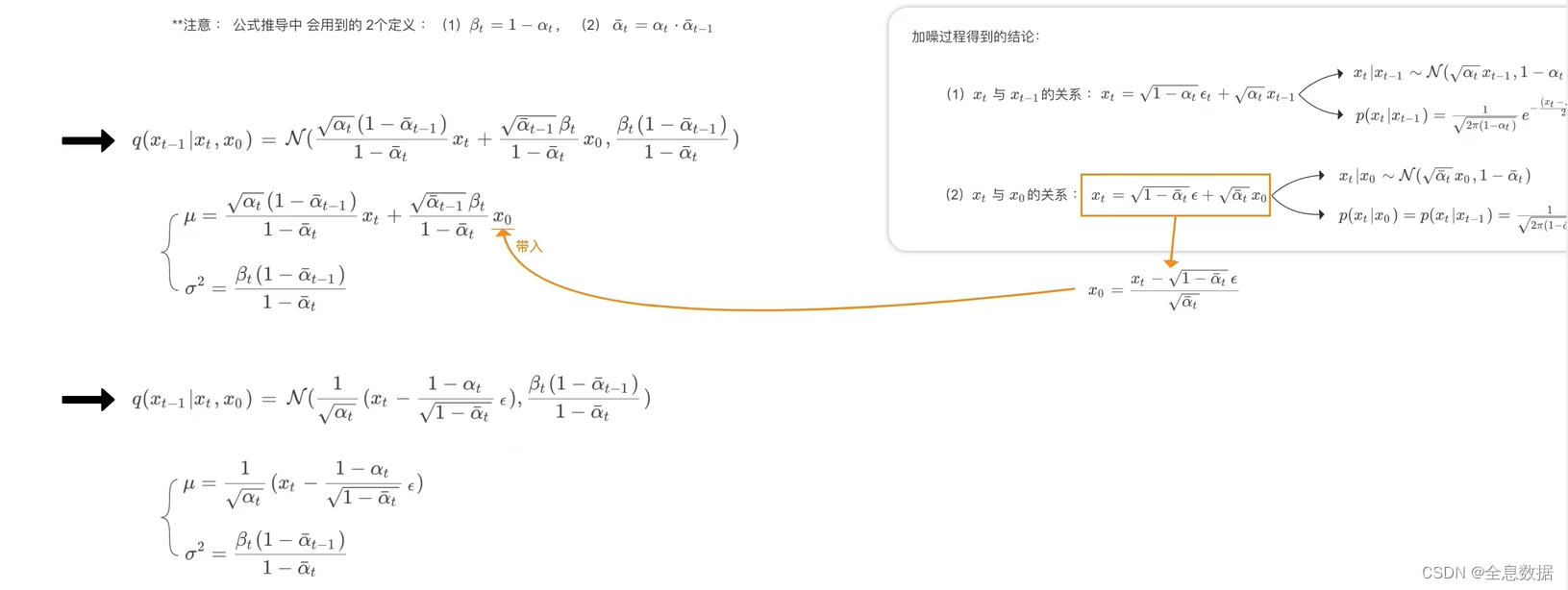
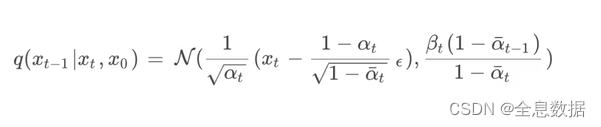
综上可知,UNet是在预测下面的公式,下面的公式中除了 ϵ \epsilon ϵ之外都是已知量,所以UNet网络实际预测的就是 ϵ \epsilon ϵ,
5、 伪代码过程
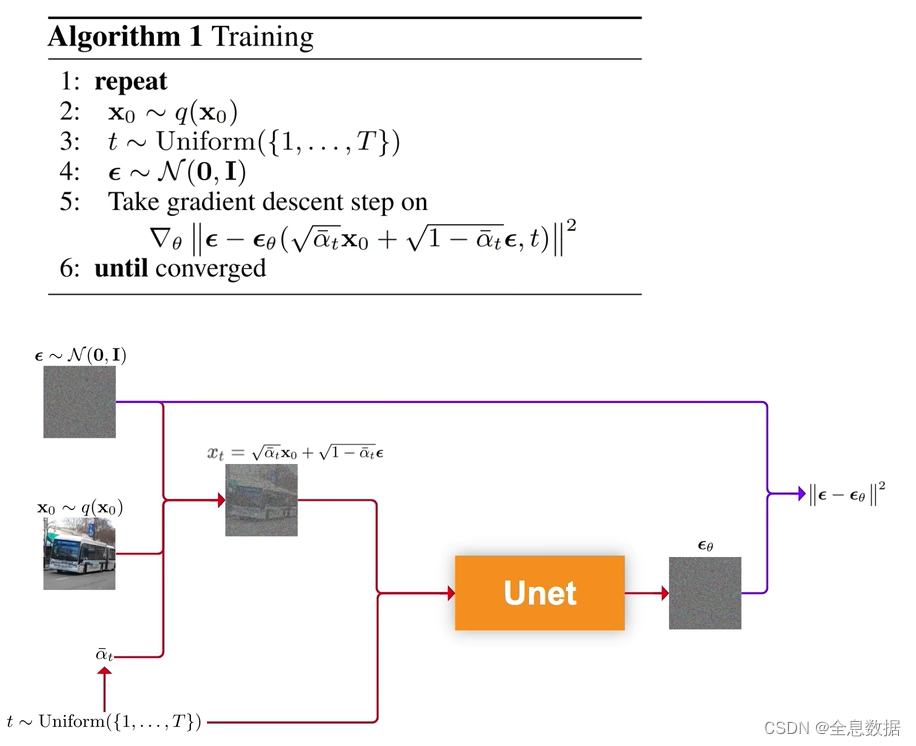
下图是训练阶段的伪代码,第1行和第6行表示第2行到第5行的代码一直在循环,
第2行:从数据集中筛选出一张图像,即为 x 0 \bf{x}_0 x0,
第3行:从0到 T T T的均匀分布中筛选出 t t t,源码中 T T T的范围设为1000,
第4行:从均值为0,方差为1的标准正态分布中采样出 ϵ \epsilon ϵ, ϵ \epsilon ϵ的size和 x 0 \bf{x}_0 x0的size是相同的,
第5行: x t x_t xt和从0到 T T T的均匀分布中筛选出 t t t喂给Unet,输出 ϵ θ \epsilon_\theta ϵθ,和第4行代码采样出的 ϵ \epsilon ϵ, ∣ ∣ ϵ − ϵ θ ( . . . ) ∣ ∣ 2 ||\epsilon-\epsilon_\theta(...)||^2 ∣∣ϵ−ϵθ(...)∣∣2的均方差作为损失函数,对这个损失函数求梯度进行参数更新,参数是Unet所有参数的集合 θ \theta θ,
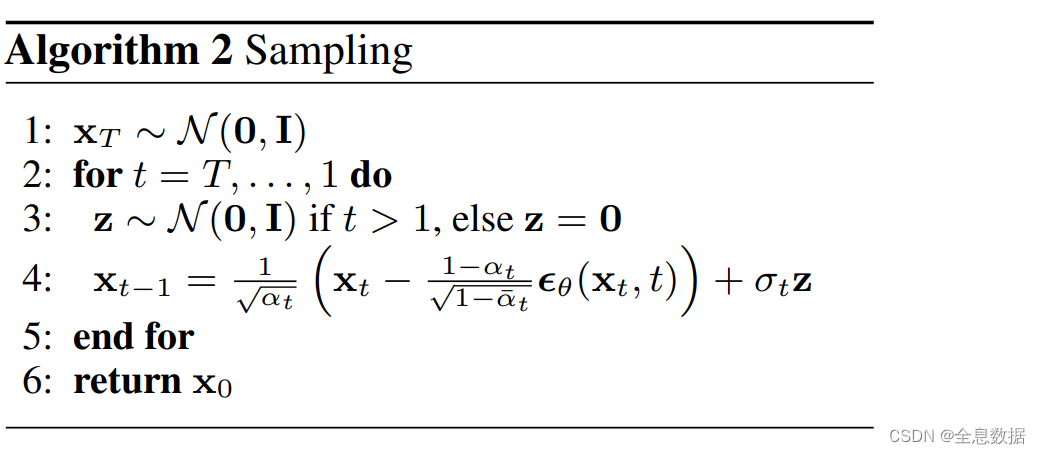
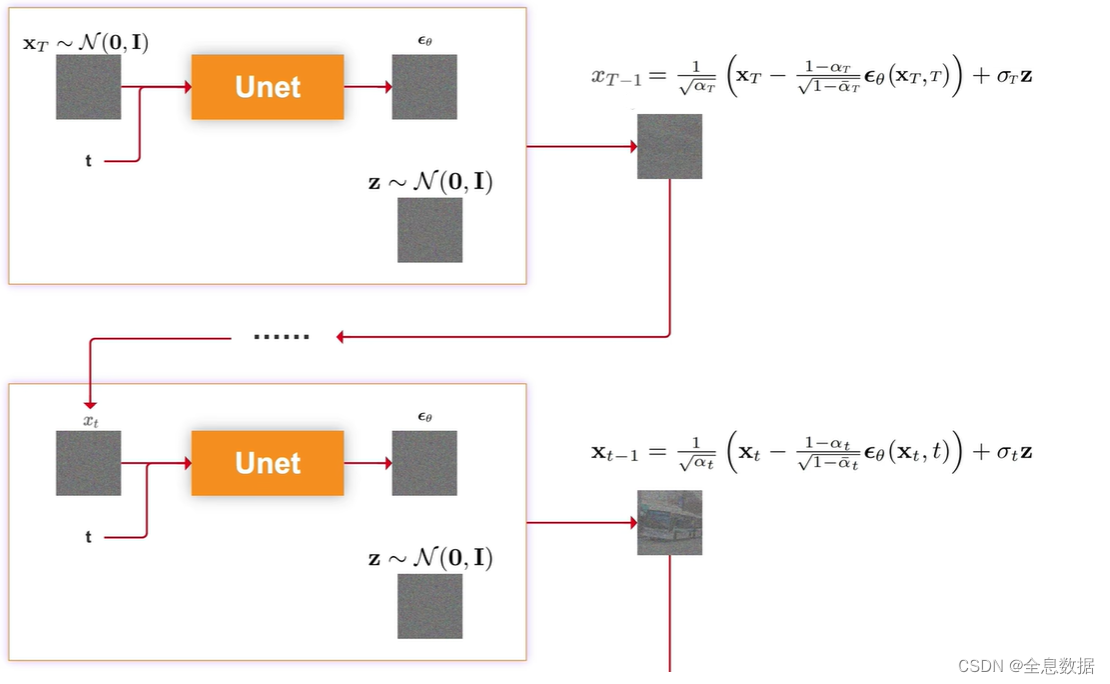
下图是推导/采样/生成图片阶段的伪代码,
第1行:从随机分布中采样一个 x T {\bf x}_T xT,
第2行:遍历从 T T T到1,
第3行:从随机分布中采样一个 z \bf{z} z,
第4行:已知 z \bf{z} z、 α t \alpha_t αt、 σ t \sigma_t σt, ϵ θ \epsilon_\theta ϵθ是Unet网络生成的,就可以得到 x t − 1 {\bf x}_{t-1} xt−1
循环2-4行代码,
参考:
1、CSDN链接:链接
2、哔哩视频:https://www.bilibili.com/video/BV1ju4y1x7L4/?p=5&spm_id_from=pageDriver
3、论文Denoising Diffusion Probabilistic Models:https://arxiv.org/pdf/2006.11239.pdf
这篇关于Stable Diffusion扩散模型【详解】小白也能看懂!!的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





