本文主要是介绍(五)ROS2学习--创建调用其它包接口的一个发布者,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
这里写自定义目录标题
- 一、背景
- 二、构建步骤
- 1. 构建项目包
- 2. 创建消息接口
- 3. 修改“package.xml”
- 4. 修改"src/smart_car/CMakeLists.txt"
- 5. 创建发布者程序
- 三、编译及验证
- 1. 编译
- 2. 验证
一、背景
主机:Ubuntu20.04
介绍:基于上一篇(四)ROS2学习–第一个ROS2项目(创建一个客制化接口),本片教程将会在新的包里面创建新的发布者publisher,发布到上一篇文章创建的topic,另外创建新的接收者subscriber也可以参考本篇文章。
二、构建步骤
1. 构建项目包
- 首先打开上一篇文章所用到的源码目录
cd <Your project path>/ros2_01/src
- 创建ROS2项目包及msg
ros2 pkg create --build-type ament_cmake car_publish_test
mkdir car_publish_test/msg
创建完成后项目目录结构如下
.
├── build.sh
└── src├── car_publish_test│ ├── CMakeLists.txt│ ├── include│ │ └── car_publish_test│ ├── msg│ ├── package.xml│ └── src└── smart_car├── CMakeLists.txt├── include│ └── smart_car├── msg│ └── Car.msg├── package.xml└── src├── publish_car.cpp└── subscriber_car.cpp11 directories, 8 files
2. 创建消息接口
- 创建msg文件
既然要用到上一篇文章创建的接口,就必然与上一个包里的msg文件有所关联,所以我们在路径“ros2_01/src/car_publish_test/msg/”目录下创建一个.msg文件,命名为Car.msg,内容如下:
smart_car/Car[] car
3. 修改“package.xml”
在"package.xml"中添加项目编译时依赖rosidl_default_generators及运行时依赖rosidl_default_runtime及依赖所在的组别。同时,此包依赖上一篇文章中生成的"smart_car", 也要添加编译和运行依赖。添加后的文件内容如下(需要自行修改项目描述description,作者信息maintainer ,以及遵从的license) :
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3"><name>car_publish_test</name><version>0.0.0</version><description>TODO: Package description</description><maintainer email="your email address">Your name</maintainer><license>TODO: License declaration</license><buildtool_depend>ament_cmake</buildtool_depend><test_depend>ament_lint_auto</test_depend><test_depend>ament_lint_common</test_depend><buildtool_depend>rosidl_default_generators</buildtool_depend><exec_depend>rosidl_default_runtime</exec_depend><member_of_group>rosidl_interface_packages</member_of_group><build_depend>smart_cat</build_depend><exec_depend>smart_cat</exec_depend><export><build_type>ament_cmake</build_type></export>
</package>
4. 修改"src/smart_car/CMakeLists.txt"
将添加以下内容:
- 配置msg文件到保存 msg文件列表 的变量中。
- 添加编译对“smart_car” 包的依赖
- 通过配置的msg_files变量,rosidl_generate_interfaces接口 将消息列表添加到项目中
- 添加运行时依赖rosidl_default_runtime
find_package(rclcpp REQUIRED)查找编译发布者程序依赖的“rclcpp”包。- 最终添加发布者程序编译及安装操作,切记添加"rosidl_target_interfaces"的接口,确保可以使用自定义的接口
set(msg_files"msg/Car.msg"
)find_package(smart_car REQUIRED)rosidl_generate_interfaces(${PROJECT_NAME}${msg_files}DEPENDENCIES smart_car
)ament_export_dependencies(rosidl_default_runtime)find_package(rclcpp REQUIRED)add_executable(publish_car_test src/publish_car_test.cpp)
ament_target_dependencies(publish_car_test rclcpp)install(TARGETSpublish_car_test DESTINATION lib/${PROJECT_NAME})rosidl_target_interfaces(publish_car_test ${PROJECT_NAME} "rosidl_typesupport_cpp")
5. 创建发布者程序
发布者程序“ros2_01/src/car_publish_test/src/publish_car_test.cpp”。
示例代码内容如上篇文章中发布者程序一致:
#include <chrono>
#include <memory>#include "rclcpp/rclcpp.hpp"
#include "smart_car/msg/car.hpp" //包含信息列表的头文件, 规则举例Car.msg->car.h;CarAbc.msg->car_abc.husing namespace std::chrono_literals;
//以下创建一个节点及一个 smart_car TOPIC的发布者
class CarPublisher : public rclcpp::Node
{
public:CarPublisher(): Node("smart_car_publisher"){smart_car_publisher_ =this->create_publisher<smart_car::msg::Car>("smart_car", 100);//以下创建一个定时回调函数auto publish_msg = [this]() -> void {auto message = smart_car::msg::Car();message.direction = message.D_DOWN;message.note = "this is for test 2 ! ";RCLCPP_INFO(this->get_logger(), "Direction: '%d' note: '%s'", message.direction, message.note.c_str());this->smart_car_publisher_->publish(message);};//创建一个定时器,使每秒调用一次publish_msg函数timer_ = this->create_wall_timer(1s, publish_msg);}private://变量声明rclcpp::Publisher<smart_car::msg::Car>::SharedPtr smart_car_publisher_;rclcpp::TimerBase::SharedPtr timer_;
};int main(int argc, char * argv[])
{rclcpp::init(argc, argv);rclcpp::spin(std::make_shared<CarPublisher>());rclcpp::shutdown();return 0;
}
三、编译及验证
首先回到项目的根目录ros2_01
1. 编译
- 编译依赖包
注意,因为本篇所生成的包依赖上篇文章生成的"smart_car"的包,因此需要先编译及使能“smart_car”,但如果已经编译及使能则可以忽略
colcon build --packages-up-to smart_car
source install/local_setup.bash
- 编译 “car_publish_test”包
colcon build --packages-up-to car_publish_test
2. 验证
执行以下命令使发布者程序运行如下:
source install/local_setup.bash
ros2 run car_publish_test publish_car_test
结果如下:

在新的窗口打开上一篇文章"smart_car"包中的接收者节点,结果如下:

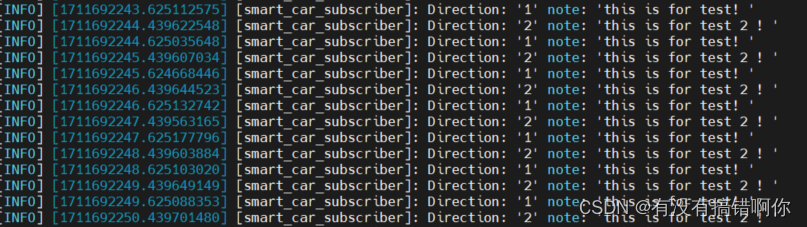
同时打开"smart_car"中的发布者程序和"car_publish_test"中的发布者程序结果会出现有意思的事情,接收者可以同时接收两个发布者所发布的不同信息如下:
代码已附
这篇关于(五)ROS2学习--创建调用其它包接口的一个发布者的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





