本文主要是介绍利用北斗BDS广播星历,进行卫星位置计算,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
一、北斗星历数据获取
1.1 计算卫星位置需要用到的星历数据:
1.2 计算卫星位置需要用到的常数
二、toc时刻计算
三、根据卫星发射时刻Tsv,计算卫星轨道参数
3.1 修正Tsv的卫星钟偏
3.2 计算规划时间
3.3 计算平近点角
3.4 迭代求解偏近点角
3.5 求解真近点角和升交点角距
3.6 轨道参数计算,并考虑摄动改正项
四、计算Tsv时刻的卫星位置
4.1 MEO/IGSO卫星位置计算
4.2 GEO卫星位置计算
五、计算Tsv时刻的卫星速度
六、计算卫星钟偏
七、MATLAB代码&运行示例
一、北斗星历数据获取
北斗广播星历获取途径:RINEX格式文件、导航电文解码。
下面以RINEX格式文件为例:
这里给出的北斗卫星分别是:C05 GEO卫星、C16 MEO/IGSO卫星。这是两种不同轨道的北斗卫星:GEO地球静止轨道卫星、MEO中圆地球轨道卫星、IGSO倾斜地球同步轨道卫星。其GEO卫星位置的计算方法与MEO/IGSO卫星不同,下面过程注意区分。
3.05 N: GNSS NAV DATA C: BDS RINEX VERSION / TYPE
BNC 2.13.0 BKG Frankfurt 20231102 101016 UTC PGM / RUN BY / DATE
Concatenated RINEX files (8) COMMENTEND OF HEADER
C05 23 11 02 08 00 00.0 1.385881332680e-04-6.030731469760e-11 0.000000000000e+001.000000000000e+00-2.278125000000e+02-5.663093033410e-09-6.708219322780e-01-7.327646017070e-06 7.320673903450e-04-1.202011480930e-05 6.493444162370e+033.744000000000e+05-5.634501576420e-08-6.255581541050e-01 3.259629011150e-089.409420036110e-02 3.626718750000e+02-1.792511645600e+00 6.869929017260e-092.378670509750e-10 9.300000000000e+02 2.000000000000e+00 0.000000000000e+00 2.999999970670e-10-9.100000000000e-093.779100000000e+05 0.000000000000e+00
C16 23 11 02 08 00 00.0-1.551879104230e-04-1.854782993860e-11 0.000000000000e+001.000000000000e+00-3.535937500000e+01 1.561493613910e-09-2.192800555490e+00-1.096632331610e-06 6.275521009230e-03 8.363742381330e-06 6.493531814580e+033.744000000000e+05-2.700835466380e-08 2.343958791130e+00 5.215406417850e-089.618269834520e-01-8.421875000000e+00-2.286522345190e+00-1.925437345050e-09-7.286017777600e-11 9.300000000000e+02 2.000000000000e+00 0.000000000000e+00-2.499999984810e-09 4.800000000000e-093.744000000000e+05 0.000000000000e+00
1.1 计算卫星位置需要用到的星历数据:
1、星历参考时刻 toc:第一行第一个数据 23 11 02 08 00 00.0
2、卫星钟差 af0:第一行第二个数据 1.385881332680e-04
3、卫星钟偏 af1:第一行第三个数据 -6.030731469760e-11
4、卫星钟偏移 af2:第一行第四个数据 0.000000000000e+00
5、轨道半径改正项 Crs:第二行第二个数据 -2.278125000000e+02
6、角速度改正项 deltan:第二行第三个数据 -5.663093033410e-09
7、平近点角 M0:第二行第四个数据 -6.708219322780e-01
8、升交点角距改正 Cuc:第三行第一个数据 -7.327646017070e-06
9、偏心率 e:第三行第二个数据 7.320673903450e-04
10、升交点角距改正 Cus:第三行第三个数据 -1.202011480930e-05
11、轨道长半轴 sqrtA:第三行第四个数据 6.493444162370e+03
12、周内秒 toe:第四行第一个数据 3.744000000000e+05
13、轨道倾角改正项 Cic:第四行第二个数据 -5.634501576420e-08
14、升交点赤经 omega0:第四行第三个数据 -6.255581541050e-01
15、轨道倾角改正项 Cis:第四行第四个数据 3.259629011150e-08
16、轨道倾角 i0:第五行第一个数据 9.409420036110e-02
17、轨道半径改正项 Crc:第五行第二个数据 3.626718750000e+02
18、近地点角距 omega:第五行第三个数据 -1.792511645600e+00
19、赤经变化 omegaDot:第五行第四个数据 6.869929017260e-09
20、轨道倾角变率 IDOT:第六行第一个数据 2.378670509750e-10
21、卫星设备时延 TGD1:第七行第三个数据 2.999999970670e-10
1.2 计算卫星位置需要用到的常数
1、圆周率 pi:3.1415926535898
2、地球自转角速度 radv:7.2921151467e-5
3、地球标准引力常数 GM:3.986005e14
4、地球引力常数 F:-4.442807633e-10
二、toc时刻计算
从RINEX文件中获取到的toc时刻是年月日时分秒的形式,toc时刻要将其化成周内秒的形式。比如:23 11 02 08 00 00.0代表的是2023年11月2日即周四的 8:00,其周内秒 toc = 4*24*3600+8*3600,toc = 374400s。我们发现 toc = toe,toc时刻与toe时刻是同步的。
三、根据卫星发射时刻Tsv,计算卫星轨道参数
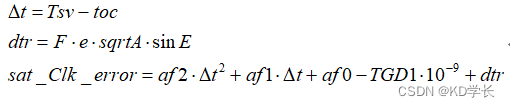
3.1 修正Tsv的卫星钟偏
卫星的真实发射时刻Tsv由初始Tsv修正卫星钟偏和卫星设备时延后得到,并且这里的Tsv也是周内秒的形式:
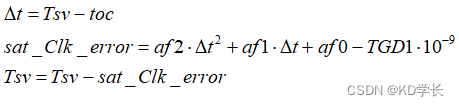
其中sat_Clk_error表示卫星钟偏。
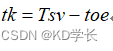
3.2 计算规划时间
星历中的toe时刻,表示星历中的所有卫星数据是toe时刻瞬间的。发射时间Tsv的卫星数据,需要通过 Tsv-toe 的差值进行计算,这个差就叫规划时间tk。
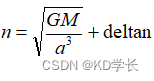
3.3 计算平近点角
轨道长半轴:

平均角速度:
平近点角:
![]()
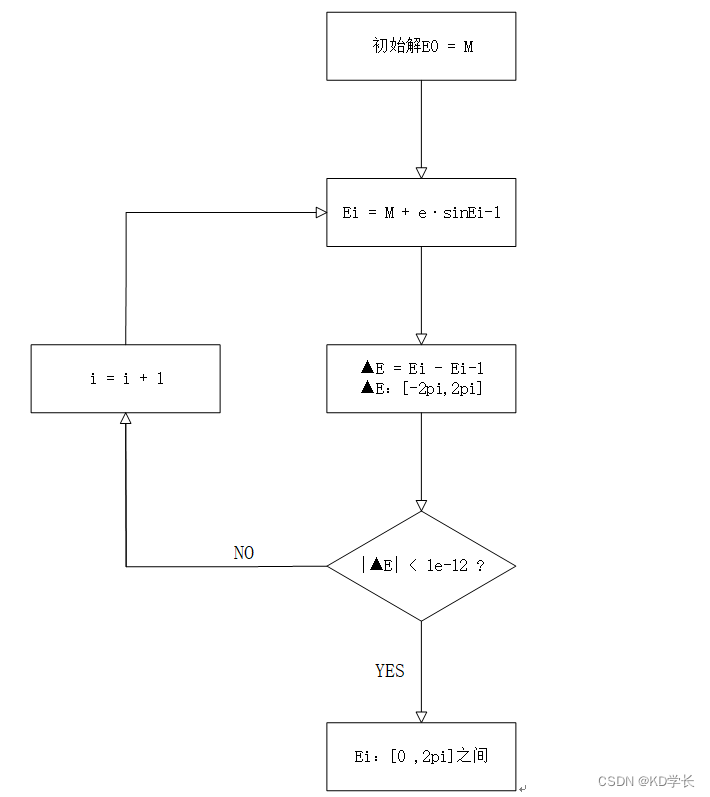
3.4 迭代求解偏近点角
偏近点角的计算公式:
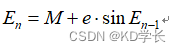
为了偏近点角的准确性,采用迭代的过程求解。
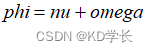
3.5 求解真近点角和升交点角距
真近点角:

升交点角距:
3.6 轨道参数计算,并考虑摄动改正项
升交点角距改正项:

轨道半径改正项:

轨道倾角改正项:
![]()
升交点角距:
![]()
轨道半径:
![]()
轨道倾角:
![]()
升交点赤经:
如果是GEO卫星升交点赤经计算公式如下:

如果是MEO/IGSO卫星升交点赤经计算公式如下:

四、计算Tsv时刻的卫星位置
根据上面的计算,已经得到了Tsv时刻的卫星轨道参数:升交点角距、轨道半径、轨道倾角、升交点赤经。
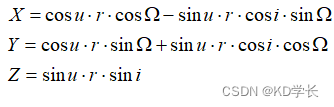
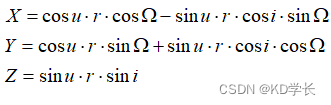
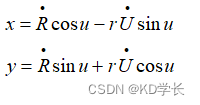
4.1 MEO/IGSO卫星位置计算
MEO/IGSO卫星位置的ECEF坐标,可由下面公式计算得到:
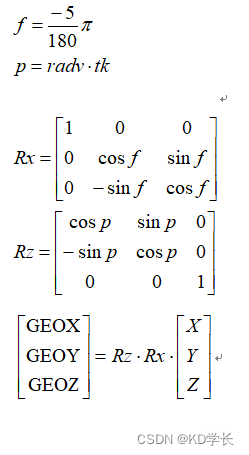
4.2 GEO卫星位置计算
GEO卫星位置的ECEF坐标,可由下面公式计算得到:
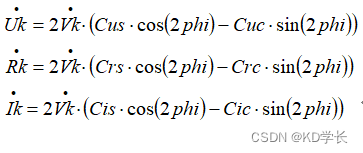
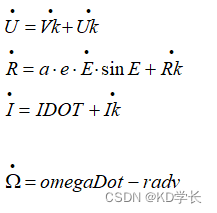
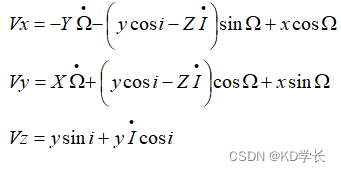
五、计算Tsv时刻的卫星速度
根据上面的计算,已经得到了Tsv时刻的卫星轨道速度参数:平均角速度 n、偏近点角 E、偏心率 e、升交点角距 phi 等。
卫星 (X,Y,Z) 三个方向上的速度,可根据下面公式得到:

六、计算卫星钟偏
七、MATLAB代码&运行示例
主程序 main.m:
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% 计算BD卫星的位置和速度
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
clear;
clc;% 卫星发射时刻
tsv = 3.744000000000e+05 + 20;% MEO卫星的星历参数
MEO_eph.toc = 3.744000000000e+05;
MEO_eph.af2 = 0.000000000000e+00;
MEO_eph.af1 = -1.854782993860e-11;
MEO_eph.af0 = -1.551879104230e-04;
MEO_eph.TGD1 = -2.499999984810e-09;
MEO_eph.sqrtA = 6.493531814580e+03;
MEO_eph.toe = 3.744000000000e+05;
MEO_eph.deltan = 1.561493613910e-09;
MEO_eph.M0 = -2.192800555490e+00;
MEO_eph.e = 6.275521009230e-03;
MEO_eph.i0 = 9.618269834520e-01;
MEO_eph.IDOT = -7.286017777600e-11;
MEO_eph.omega = -2.286522345190e+00;
MEO_eph.Cuc = -1.096632331610e-06;
MEO_eph.Cus = 8.363742381330e-06;
MEO_eph.Crc = -8.421875000000e+00;
MEO_eph.Crs = -3.535937500000e+01;
MEO_eph.Cic = -2.700835466380e-08;
MEO_eph.Cis = 5.215406417850e-08;
MEO_eph.omega0 = 2.343958791130e+00;
MEO_eph.omegaDot = -1.925437345050e-09;% GEO卫星的星历参数
GEO_eph.toc = 3.744000000000e+05;
GEO_eph.af2 = 0.000000000000e+00;
GEO_eph.af1 = -6.030731469760e-11;
GEO_eph.af0 = 1.385881332680e-04;
GEO_eph.TGD1 = 2.999999970670e-10;
GEO_eph.sqrtA = 6.493444162370e+03;
GEO_eph.toe = 3.744000000000e+05;
GEO_eph.deltan = -5.663093033410e-09;
GEO_eph.M0 = -6.708219322780e-01;
GEO_eph.e = 7.320673903450e-04;
GEO_eph.i0 = 9.409420036110e-02;
GEO_eph.IDOT = 2.378670509750e-10;
GEO_eph.omega = -1.792511645600e+00;
GEO_eph.Cuc = -7.327646017070e-06;
GEO_eph.Cus = -1.202011480930e-05;
GEO_eph.Crc = 3.626718750000e+02;
GEO_eph.Crs = -2.278125000000e+02;
GEO_eph.Cic = -5.634501576420e-08;
GEO_eph.Cis = 3.259629011150e-08;
GEO_eph.omega0 = -6.255581541050e-01;
GEO_eph.omegaDot = 6.869929017260e-09;% 分别计算GEO、MEO卫星位置
[MEO_positionX, MEO_positionY, MEO_positionZ, MEO_Vx, MEO_Vy, MEO_Vz, MEO_sat_Clk_error] = MEO_state_tsv(tsv,MEO_eph);
[GEO_positionX, GEO_positionY, GEO_positionZ, GEO_sat_Clk_error] = GEO_state_tsv(tsv,GEO_eph);% 打印输出
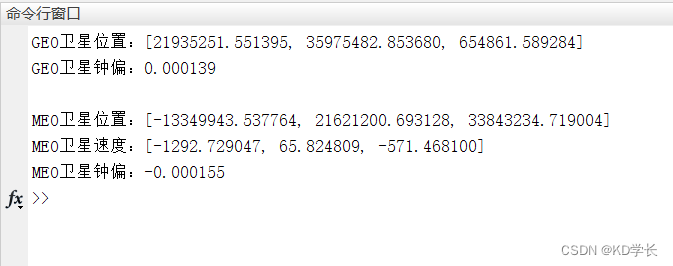
fprintf('GEO卫星位置:[%f, %f, %f]\n',GEO_positionX,GEO_positionY,GEO_positionZ);
fprintf('GEO卫星钟偏:%f\n',GEO_sat_Clk_error);
fprintf('\n');
fprintf('MEO卫星位置:[%f, %f, %f]\n',MEO_positionX,MEO_positionY,MEO_positionZ);
fprintf('MEO卫星速度:[%f, %f, %f]\n',MEO_Vx,MEO_Vy,MEO_Vz);
fprintf('MEO卫星钟偏:%f\n',MEO_sat_Clk_error);函数 MEO_state_tsv.m:
function [positionX,positionY,positionZ,Vx,Vy,Vz,sat_Clk_error] = MEO_state_tsv(tsv,EPH)
%计算MEO卫星的位置%%%%%%%%%%%%%%%%
%数据准备
%%%%%%%%%%%%%%%%
radv = 7.2921151467e-5;
GM = 3.986005e14;
F = -4.442807633e-10;
toc = EPH.toc;
Tsv = tsv;
af0 = EPH.af0;
af1 = EPH.af1;
af2 = EPH.af2;
TGD1 = EPH.TGD1;
sqrtA = EPH.sqrtA;
toe = EPH.toe;
deltan = EPH.deltan;
M0 = EPH.M0;
e = EPH.e;
i0 = EPH.i0;
IDOT = EPH.IDOT;
omega = EPH.omega;
Cuc = EPH.Cuc;
Cus = EPH.Cus;
Crc = EPH.Crc;
Crs = EPH.Crs;
Cic = EPH.Cic;
Cis = EPH.Cis;
omega0 = EPH.omega0;
omegaDot = EPH.omegaDot;%计算卫星信号发射时间
delt = Tsv - toc;
sat_Clk_error = af2*delt^2 + af1*delt + af0 - TGD1*1e-9;
Tsv = Tsv - sat_Clk_error;%计算规划时间
tk = Tsv - toe;%计算平近点角
a = sqrtA^2;
n = sqrt(GM/(a^3)) + deltan;
M = M0 + n*tk;
M = mod(M,2*pi);%迭代求解偏近点角
E0 = M;
while 1Ei = M + e*sin(E0);delt_E = Ei - E0;delt_E = rem(delt_E,2*pi);if abs(delt_E) < 1e-12E = Ei;break;elseE0 = Ei;end
end%求解真近点角和升交点角距
nu = atan2(sqrt(1-e^2)*sin(E),cos(E)-e);
phi = nu + omega;
phi = rem(phi,2*pi);%考虑摄动改正项
delt_u = Cuc*cos(2*phi) + Cus*sin(2*phi);
delt_r = Crc*cos(2*phi) + Crs*sin(2*phi);
delt_i = Cic*cos(2*phi) + Cis*sin(2*phi);
u = phi + delt_u;
r = a*(1-e*cos(E))+delt_r;
i = i0+IDOT*tk+delt_i;%计算升交点赤经
OMEGA = omega0+(omegaDot-radv)*tk-radv*toe;
OMEGA = mod(OMEGA,2*pi);%卫星坐标WGS-84
positionX = cos(u)*r*cos(OMEGA) - sin(u)*r*cos(i)*sin(OMEGA);
positionY = cos(u)*r*sin(OMEGA) + sin(u)*r*cos(i)*cos(OMEGA);
positionZ = sin(u)*r*sin(i);%计算卫星速度
E_dot = n/(1-e*cos(E));
Vk_dot = (sqrt(1-e^2)*E_dot)/(1-e*cos(E));Uk_dot = 2*Vk_dot*(Cus*cos(2*phi)-Cuc*sin(2*phi));
Rk_dot = 2*Vk_dot*(Crs*cos(2*phi)-Crc*sin(2*phi));
Ik_dot = 2*Vk_dot*(Cis*cos(2*phi)-Cic*sin(2*phi));U_dot = Vk_dot + Uk_dot;
R_dot = a*e*E_dot*sin(E) + Rk_dot;
I_dot = IDOT + Ik_dot;OMEGA_dot = omegaDot - radv;x = R_dot*cos(u) - r*U_dot*sin(u);
y = R_dot*sin(u) + r*U_dot*cos(u);Vx = -positionY*OMEGA_dot - (y*cos(i)-positionZ*I_dot)*sin(OMEGA) + x*cos(OMEGA);
Vy = positionX*OMEGA_dot + (y*cos(i)-positionZ*I_dot)*cos(OMEGA) + x*sin(OMEGA);
Vz = y*sin(i) + y*I_dot*cos(i);%更新卫星钟偏
dtr = F*e*sqrtA*sin(E);
sat_Clk_error = af2*delt^2 + af1*delt + af0 - TGD1*1e-9 + dtr;end函数 GEO_state_tsv.m:
function [positionX,positionY,positionZ,sat_Clk_error] = GEO_state_tsv(tsv,EPH)
%计算GEO卫星的位置%%%%%%%%%%%%%%%%
%数据准备
%%%%%%%%%%%%%%%%
radv = 7.2921151467e-5;
GM = 3.986005e14;
F = -4.442807633e-10;
toc = EPH.toc;
Tsv = tsv;
af0 = EPH.af0;
af1 = EPH.af1;
af2 = EPH.af2;
TGD1 = EPH.TGD1;
sqrtA = EPH.sqrtA;
toe = EPH.toe;
deltan = EPH.deltan;
M0 = EPH.M0;
e = EPH.e;
i0 = EPH.i0;
IDOT = EPH.IDOT;
omega = EPH.omega;
Cuc = EPH.Cuc;
Cus = EPH.Cus;
Crc = EPH.Crc;
Crs = EPH.Crs;
Cic = EPH.Cic;
Cis = EPH.Cis;
omega0 = EPH.omega0;
omegaDot = EPH.omegaDot;%计算卫星信号发射时间
delt = Tsv - toc;
sat_Clk_error = af2*delt^2 + af1*delt + af0 - TGD1*1e-9;
Tsv = Tsv - sat_Clk_error;%计算规划时间
tk = Tsv - toe;%计算平近点角
a = sqrtA^2;
n = sqrt(GM/(a^3)) + deltan;
M = M0 + n*tk;
M = mod(M,2*pi);%迭代求解偏近点角
E0 = M;
while 1Ei = M + e*sin(E0);delt_E = Ei - E0;delt_E = rem(delt_E,2*pi);if abs(delt_E) < 1e-12E = Ei;break;elseE0 = Ei;end
end%求解真近点角和升交点角距
nu = atan2(sqrt(1-e^2)*sin(E),cos(E)-e);
phi = nu + omega;
phi = rem(phi,2*pi);%考虑摄动改正项
delt_u = Cuc*cos(2*phi) + Cus*sin(2*phi);
delt_r = Crc*cos(2*phi) + Crs*sin(2*phi);
delt_i = Cic*cos(2*phi) + Cis*sin(2*phi);
u = phi + delt_u;
r = a*(1-e*cos(E))+delt_r;
i = i0+IDOT*tk+delt_i;%计算升交点赤经
OMEGA = omega0+omegaDot*tk-radv*toe;
OMEGA = mod(OMEGA,2*pi);%卫星坐标WGS-84
X = cos(u)*r*cos(OMEGA) - sin(u)*r*cos(i)*sin(OMEGA);
Y = cos(u)*r*sin(OMEGA) + sin(u)*r*cos(i)*cos(OMEGA);
Z = sin(u)*r*sin(i);%GEO卫星的位置
f = -5/180*pi;
p = radv*tk;
Rx = [1 0 0; 0 cos(f) sin(f); 0 -sin(f) cos(f)];
Rz = [cos(p) sin(p) 0; -sin(p) cos(p) 0; 0 0 1];
position = Rz*Rx*[X;Y;Z];
positionX = position(1);
positionY = position(2);
positionZ = position(3);%更新卫星钟偏
dtr = F*e*sqrtA*sin(E);
sat_Clk_error = af2*delt^2 + af1*delt + af0 - TGD1*1e-9 + dtr;end运行结果:
这篇关于利用北斗BDS广播星历,进行卫星位置计算的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






