本文主要是介绍UAV123数据集下载、简介及配置,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
UAV123主要由91个无人机视频组成,其中有数个视频序列较长,拆分成三四个较短的片段,使用多次,所以有123个groundtruth,其中包含20个长视频即UAV20L,虽然不如OTB100出名,但不少文章都将UAV123的测试结果进行比较,可见其权威性。
由于在之前的博客详细写了OTB的数据集配置方法,所以,这里主要是介绍UAV123不同于OTB100的地方。如果是第一次配置,可以参阅我的上一篇博客。目标跟踪之OTB数据集下载及Visual Tracker Benchmark v1.0配置
一、数据集下载
UAV123下载地址:https://cemse.kaust.edu.sa/ivul/uav123
百度网盘:下载地址,提取码:7lwk
感谢博客【技术向】目标跟踪UAV123数据集下载及使用指南的分享
二、Visual Tracker Benchmark v1.1下载
下载地址链接:https://pan.baidu.com/s/1Xh3XwhvlyEOQFSkxhyZRtg
提取码:0m5l
三、main_running.m运行
3.1修改第八行,填上工具包的路径
下载地址:http://cvlab.hanyang.ac.kr/tracker_benchmark/benchmark_v10.html

3.2修改/util/文件夹底下的configseq.m文件,修改数据集的路径

3.3修改util/configTrackers.m,选择或添加自己想测试的跟踪器
3.4运行main_running.m,正常情况下打印信息如下,如果出现error,则有可能是接口函数没写好,解决思路在我的上一篇博客讲过,此处不再介绍了
四、UAV123和OTB100的差别
UAV的数据集没有img这一层目录,而OTB100得写到img这一层,其余没有明显的差别。
初次接触UAV数据集,在这里记录我对UAV和OTB两数据集差异的认识,能力有限,仅供参考!
UAV数据集难点:
- out of view:目标在画面完全消失,相比于OTB,UAV123存在不少目标从画面完全消失的情况,典型的比如bird1
- 小目标:从整个画面看,目标特别小,但由于UAV图片比较大,所以小目标的尺寸实际也不算小,但与后续画面相比,尺寸变化大。如下图,左边是原图,右边是我截取的目标位置,可以发现第一帧中,自行车相比于整个画面,特别小,小的肉眼都看不见

- 长视频:UAV的视频一般都是1000帧以上,模型容易退化
- 拍摄角度变化大:如下面三张图都截取于person20,前后角度变化大,这就需要跟踪器有较快的学习能力—提高学习率

整体来讲,UAV要难于OTB,一方面要使模型鲁棒,在完全遮挡后能再次跟住目标,另一方面又需要模型更新速度快,以适应拍摄角度的快速变化,不过从我目前看的几个算法,基本都是加快模型的学习,对于完全遮挡或者是目标从画面丢失,没有什么好方法来解决。
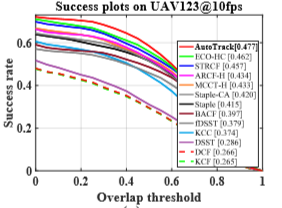
五、success、precision曲线简介
这两种曲线可以说是所有论文都在用的,在这里简要分享一下自己的理解,但因为那篇论文我也没阅读过,所以理解仅供参考
5.1success plot of OPE
这主要考察的是重叠率,跟踪器预测的目标包围框与人工标注的基准包围框的重叠面积占总面积的比例,横坐标主要是阈值。比如0.2意味着重叠面积超过总面积20%即认为跟踪成功,统计跟踪成功的帧数占总帧数的比例,并以该比例为纵坐标进行绘制曲线
如下图,红色为人工标注的基准包围框,绿色为跟踪器预测的包围框,黄色虚线的面积即重叠面积,与红色、绿色面积之和的比值大于某一阈值(0.2、0.4、0.6、0.8)即认为跟踪成功

5.2 precision of OPE
这主要是衡量预测目标包围框位置与人工标注的基准包围框的中心位置之间的距离,因此,该曲线的横坐标主要是像素,比如20意味着预测的位置和人工标注的位置之间距离小于20像素,认为是跟踪成功
如下图,预测的目标位置A和人工标注的位置B之间的距离(黄色线)小于一定阈值(20像素、40、50),则认为跟踪成功


这篇关于UAV123数据集下载、简介及配置的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







