本文主要是介绍东京大学最新研究成果!一种可实现陆空两栖的新型四足机器人SPIDAR,具备多模态运动能力,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
原创/文 BFT机器人
现实中,蜘蛛可以凭借飘荡的蛛丝在空中漂浮,让它们能够穿越复杂地形。普通蜘蛛长度只有几毫米,重量只有几十克,如何让比蜘蛛重数百倍的机器人实现多模态运动,是众多学者研究的热点。
具有多模态运动能力的机器人,几乎都是移动系统的大杂烩,不能真正实现协同工作。例如,通过给多足机器人装上一堆螺旋桨们,能够让机器人实现飞行,但在其他时间,足或者螺旋桨对机器人本身来说只是增添额外重量的物件。
近日,东京大学工学机械工学系的研究团队开发了一种新型四足机器人——既能爬又能飞的机器蜘蛛SPIDAR。SPIDAR没有腿部执行器,在各关节四肢上使用重量较轻的伺服装置,让机器人可以在没有喷气发动机的情况下获得升力,使整个机器人实现“空中飞行”。团队相关论文《Design, Modeling and Control of a Quadruped Robot SPIDAR: Spherically Vectorable and Distributed Rotors Assisted Air-Ground Amphibious Quadruped Robot》现已公布。

论文地址:https://arxiv.org/abs/2301.04050
“多模态运动能力”作为机器人领域的新兴研究方向一直备受关注,在过去的十余年中,具备多模态运动能力的机器人研究经历了广泛的发展,实现了在陆地和空中两个领域的机动。
什么是多模态运动?
自然界中,许多动物具备在不同环境中进行多种运动的能力(例如游泳、行走、奔跑、攀爬),从而极大地提升了自身的环境适应能力,我们称这种相同身体构造下能够实现不同模式运动的现象为多模态运动。
在这些机器人中,绝大多数仅仅是移动系统的大杂烩,有几种最先进的双足机器人能够实现复杂的行走+飞行运动。但由于中心化的转子布置,现阶段所研制的多模态运动机器人很难在半空中保持关节运动的稳定性。
对此难点,研究人员设计了一种名为SPIDAR的新型空陆两栖四足机器人,该机器人没有腿部执行器,而是由具有可移动腿部的矢量腿部推进器单独连接,并使整个机器人完全升空。

接着,研究人员展示了该混合机器人平台的建模方法,并进一步开发了一种具有关节运动的行走和飞行的集成控制策略。

最后,通过执行涉及静态行走和后续飞行的无缝运动实验,证明了所提出的混合四足机器人的可行性。

设计
SPIDAR 的每个肢体部分都附有一个球形矢量双推进器,这些推进器可以围绕肢体“滚动”并与其正交旋转,从而向任何方向提供推力。关节部分目前由小型伺服系统来驱动,主要是为了简化系统的动力学,但伺服系统的强度不足以支撑机器人的重量,它的机动性确实主要取决于推进器系统。
据悉,SPIDAR 总共有 8 个连杆和 16 个关节,重达 15公斤,其中包括分布在连杆上的 8 个电池,能够支撑总飞行时长为9 分钟,而机器人的步行距离是其两倍多。
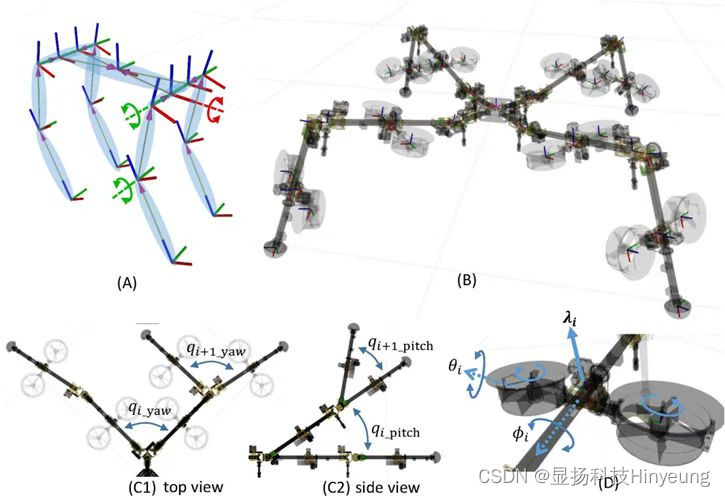
如图所示,模型是平面对称的,每条腿有三个DoF(两个在臀部,一个在膝盖)。然而,机器人不仅需要实现地面/空中混合运动,还需要实现半空中操纵,因此,全方位运动是骨架设计的关键特征。
接着,引入点对称结构,这类似于扩展型四足动物设计,该设计可以提供更宽的支撑多边形。根据这一设计理念,每个肢体由两个长度相同的连杆组成,并通过具有两个自由度(DoF)的关节模块连接到中心躯干。
鉴于轻量化设计对飞行性能非常重要,研究人员部署了一个紧凑的伺服电机,以牺牲扭矩为代价单独驱动每个关节,机器人中的转子推力可以弥补关节扭矩的不足。
建模
研究人员将建模分为了两部分:推力模型和整体动力学模型。

如图,整个动力学包括关节扭矩τj、每个肢端的接触力f c i、每个连杆的重力m i g和每个矢量转子的推力f i。{L i}和{F i}分别表示第i个连杆和转子的框架,而{CoG}是整个模型的CoG框架。对于行走过程中的自由腿,肢体末端的接触力f c i消失。
基于上述运动学模型,第i个转子模块产生的三维力fi可以写成:

实验
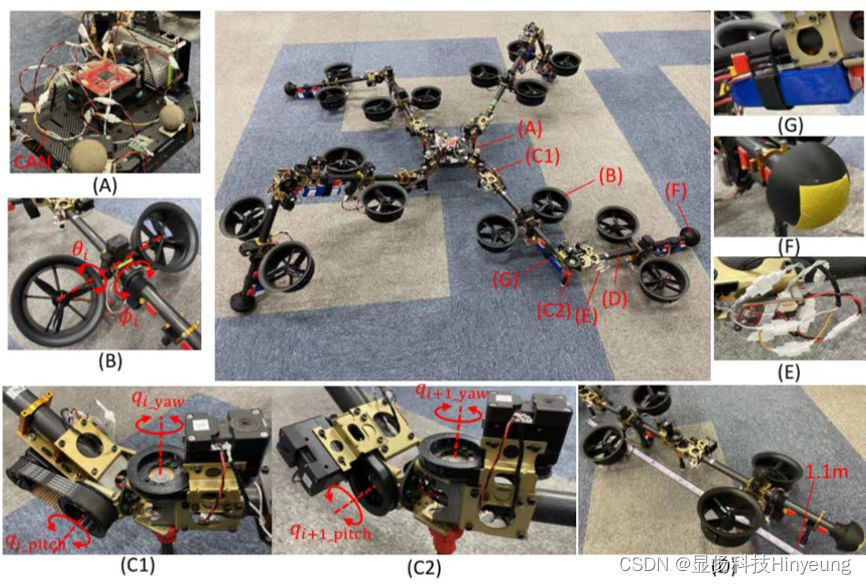
研究人员开发了一个SIDAR原型,鉴于轻量化设计,研究人员使用CFRP材料作为连杆,电缆可以穿过连杆;关节模块使用铝板连接连杆,而关节伺服是Dynamixel XH430-V350R,其扭矩由PLA制成的滑轮增强。将电池并联分布在每个连杆单元中,可提供长达9分钟的飞行时间和长达20分钟的更长步行时间,同时配备了带防滑带的半球足,以确保地面移动期间的稳定点接触。
这项工作中仍然存在的一个关键问题,即行走过程中基线姿势和关节角度的振荡和偏差。为了提高稳定性,转子推力应直接用于关节位置控制,以取代当前的简单PD控制。此外,步态规划还应通过添加反馈回路(如第V-C节所述)来抵抗漂移,再将研究动态行走和空中操纵,以增强该机器人在操纵和操纵方面的通用性。
最终,研究人员在SPIDAR样机上进行的无缝地面/空中混合运动实验验证了上述方法的可行性。
这篇关于东京大学最新研究成果!一种可实现陆空两栖的新型四足机器人SPIDAR,具备多模态运动能力的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






