本文主要是介绍(2)(2.12) Robsense SwarmLink,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
前言
1 规格(根据制造商提供)
2 EasySwarm
3 参数说明
前言
Robsense SwarmLink 遥测无线电可将多架无人机连接到一个地面站,而无需在地面站一侧安装多个无线电(即创建一个网状网络)。此外,还包括网络监控和配置软件。

Robsense SwarmLink 遥测无线电可将多架无人机连接到一个地面站,而无需在地面站一侧安装多个无线电(即创建一个网状网络)。此外,还包括网络监控和配置软件。
!Warning
开发团队无法与 Robsense 取得联系,因此我们认为制造商已不再支持该产品。
1 规格(根据制造商提供)
- MCU:ARM Cortex-M3;
- 频率:433Mhz;
- 通道带宽:500Khz;
- 调制:LoRa 扩频;
- 发射功率:20dBm;
- 接收灵敏度:-148dBm;
- 电压:5V;
- 电流:40mA;
- 接口:串行、微型 USB、局域网;
- 尺寸:83mm x 60mm x 20mm;
- 重量:65 克;
更多详情请点击此处(here)。
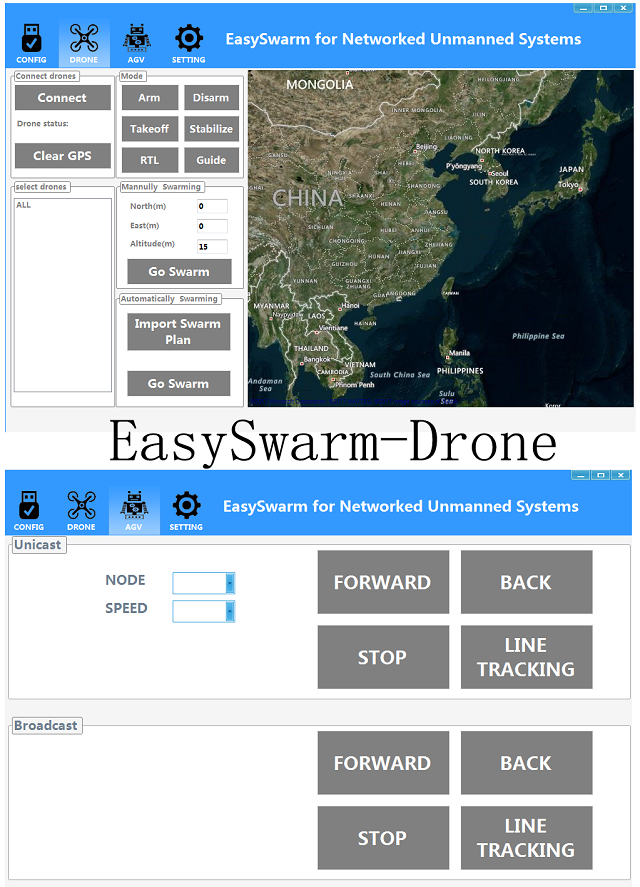
2 EasySwarm
EasySwarm 建立在 SwarmLink 硬件之上,是一款以开发人员为中心的地面站和开发工具包,旨在让蜂群工作变得更简单。这款免费开源软件可在 RobSense SwarmLink github repo 中找到。
其功能包括自定义蜂群策略、动态航点规划和实时跟踪所有飞行器。
3 参数说明
1. SERIAL1_OPTIONS: Telem1 options
注意:该参数适用于高级用户。
注意:更改后需要重启。
控制 UART 选项。InvertRX 选项控制接收引脚的反相。InvertTX 选项控制发送引脚的反转。HalfDuplex 选项控制半双工(单线)模式,即发送和接收都在发送线上完成。交换选项允许在基于 STM32F7 的电路板上交换 RX 和 TX 引脚。
| Bitmask | ||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
2. SERIAL1_BAUD: Telem1 Baud Rate
Telem1 端口使用的波特率。大多数基于 stm32 的电路板可支持高达 1500 的波特率。如果您设置了一个无法支持的波特率,然后无法连接到电路板,则应加载不同飞行器类型的固件。这将把所有参数重置为默认值。
| Values | ||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
这篇关于(2)(2.12) Robsense SwarmLink的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!