本文主要是介绍【algorithm】自动驾驶常见常考的几个模型和推导,顺便总结自己遇到的考题经验不断更新之———控制版,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
写在前面
本来快达成目标了,没想到公司遭受了问题,公司和同事我感觉还是挺好的,有国企的正规也有小企业的灵活,大家都很有学习欲望。
作为本次再次复习回忆如下:
把之前面试准备的 机器学习(基本搬运到CSDN平台了)、规划(基于之前的公司同事教导和常见算法轨迹 lattice em 路径 diji a star rrt rrt*)、控制(控制器和模型),工具链(matlab ide repo git anaconda ros linux操作)其他(frenet 、大地车辆坐标转换、点到线距离、找投影、插值、离散点求曲率(以及各种几何问题)、卡尔曼 三次道路多项式 地图参考平滑处理 滤波 轨迹优化)最小二乘:正规方程梯度下降、线性化刷题和有cpp相关的作为小白接触到的知识都总结成了word。 本文先总结搬运模型相关,希望大佬们给点方向提建议,渴望进步,其实对于经典现代控制论本身,很多东西都忘记了,只能作为笔记和考试记录存在了,实践中感觉一直用不上或者不需要再推导了。 现在的烦恼是:其中有很多新东西和非规划控制的内容由于工作方向我只能自己demo,最希望讨论和接触的是实践中积累的问题处理办法,还有能实际在工作中部署最新论文的东西,可惜工作就是工作,同时被专业方向卡住,只能积累再积累。
outline
- stanley pp
- 动力学 运动学 简单推导
- mpc
- pid
- acado 和osqp求解 见另外两篇文章
Acado:https://blog.csdn.net/weixin_46479223/article/details/133743263的实例中展示了acado如何求解mpc问题,
另一篇是osqposqp:https://blog.csdn.net/weixin_46479223/article/details/135107257 - 临时简略EM planner 信息
- 车辆动力和运动模型推导
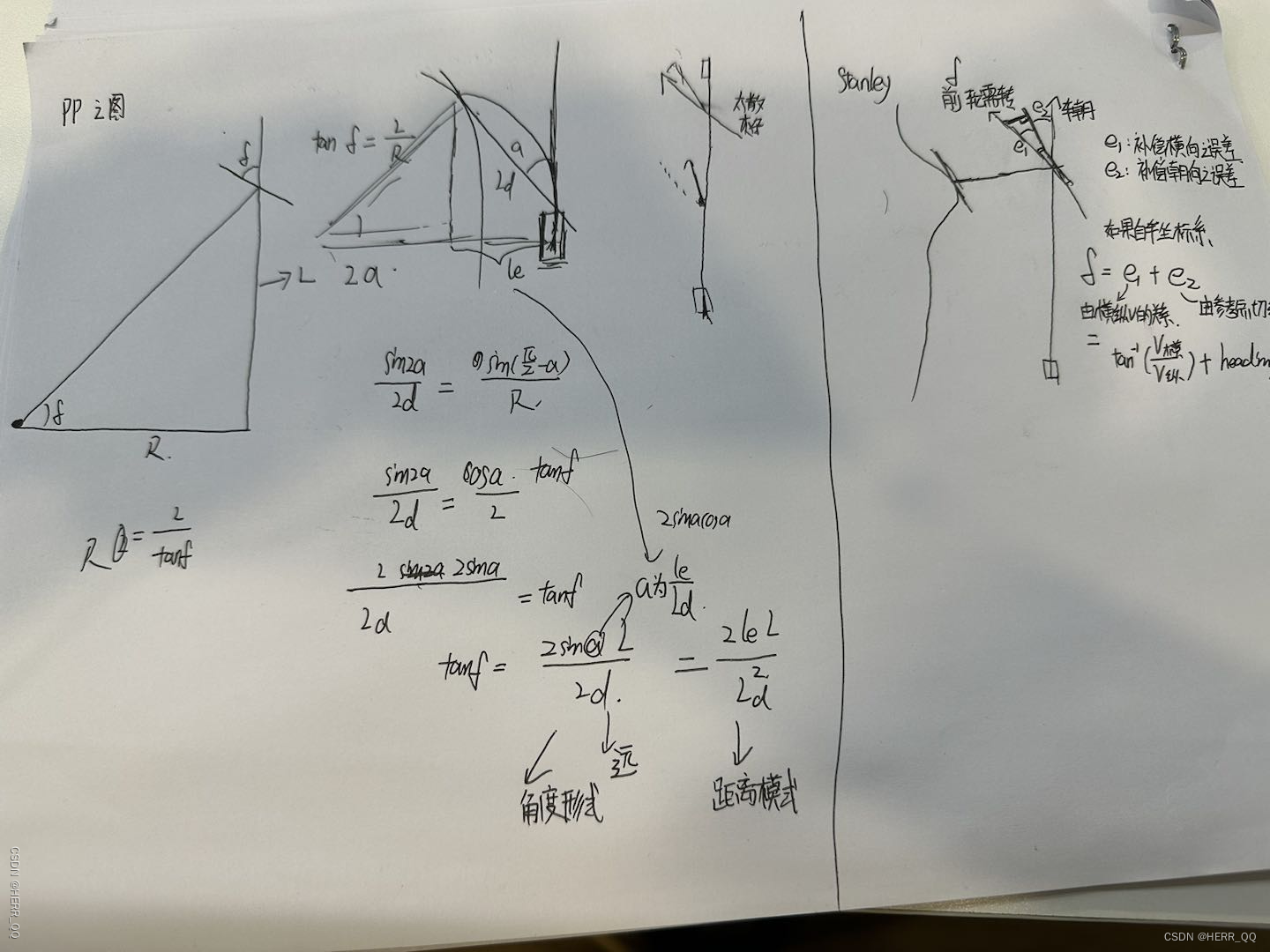
Stanley and pure pursuit
运动学
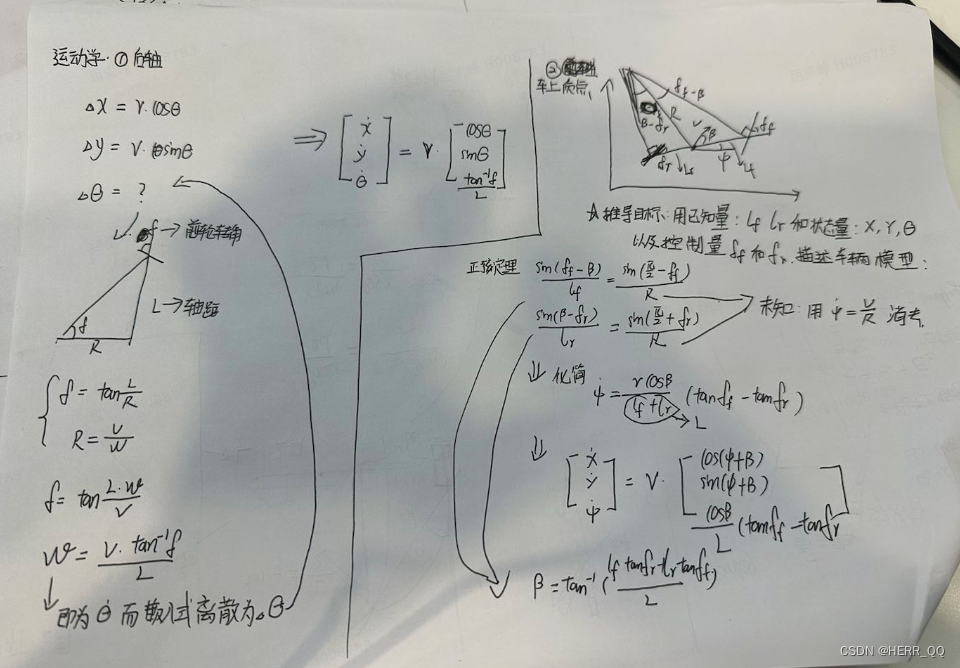
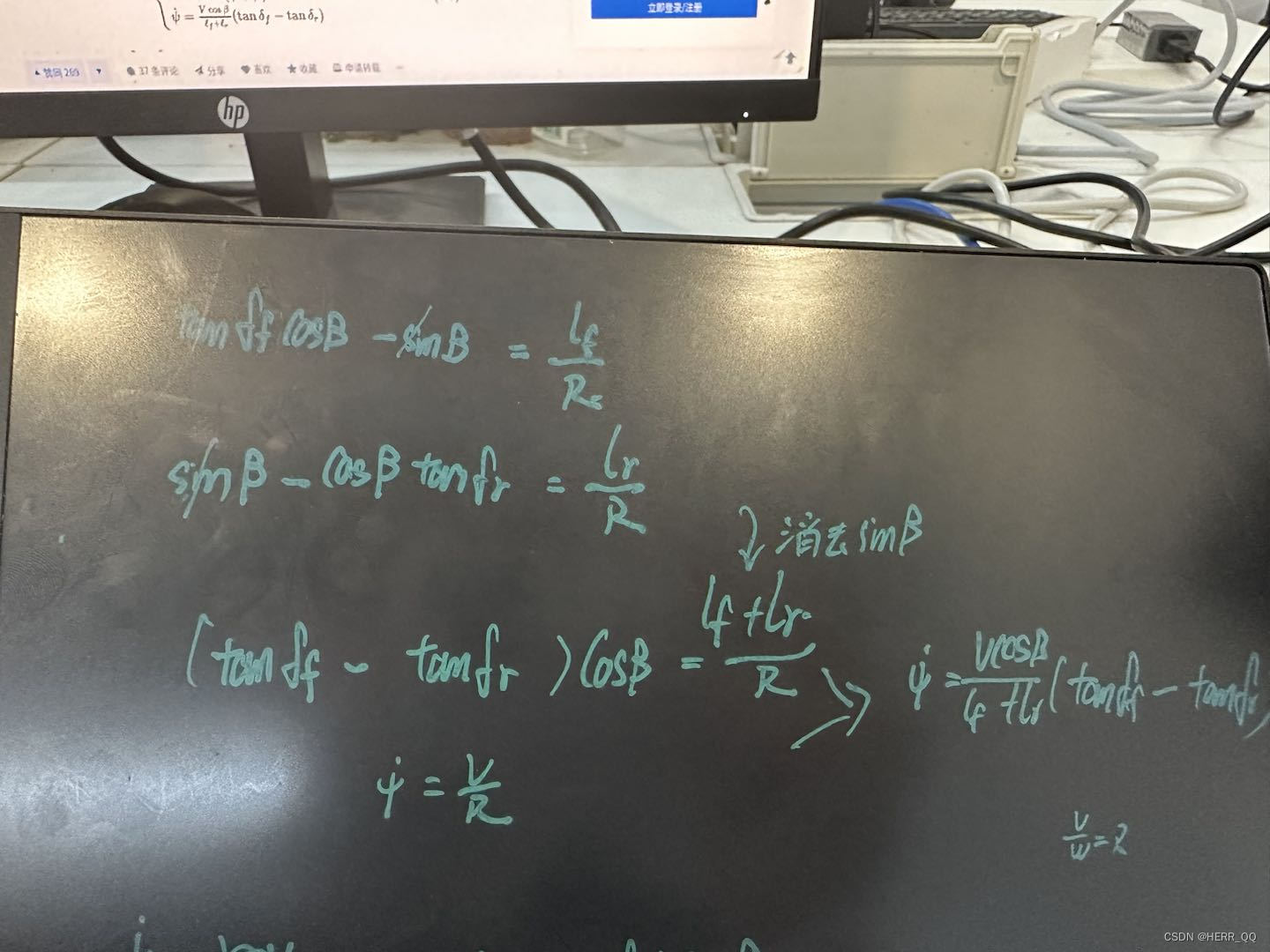
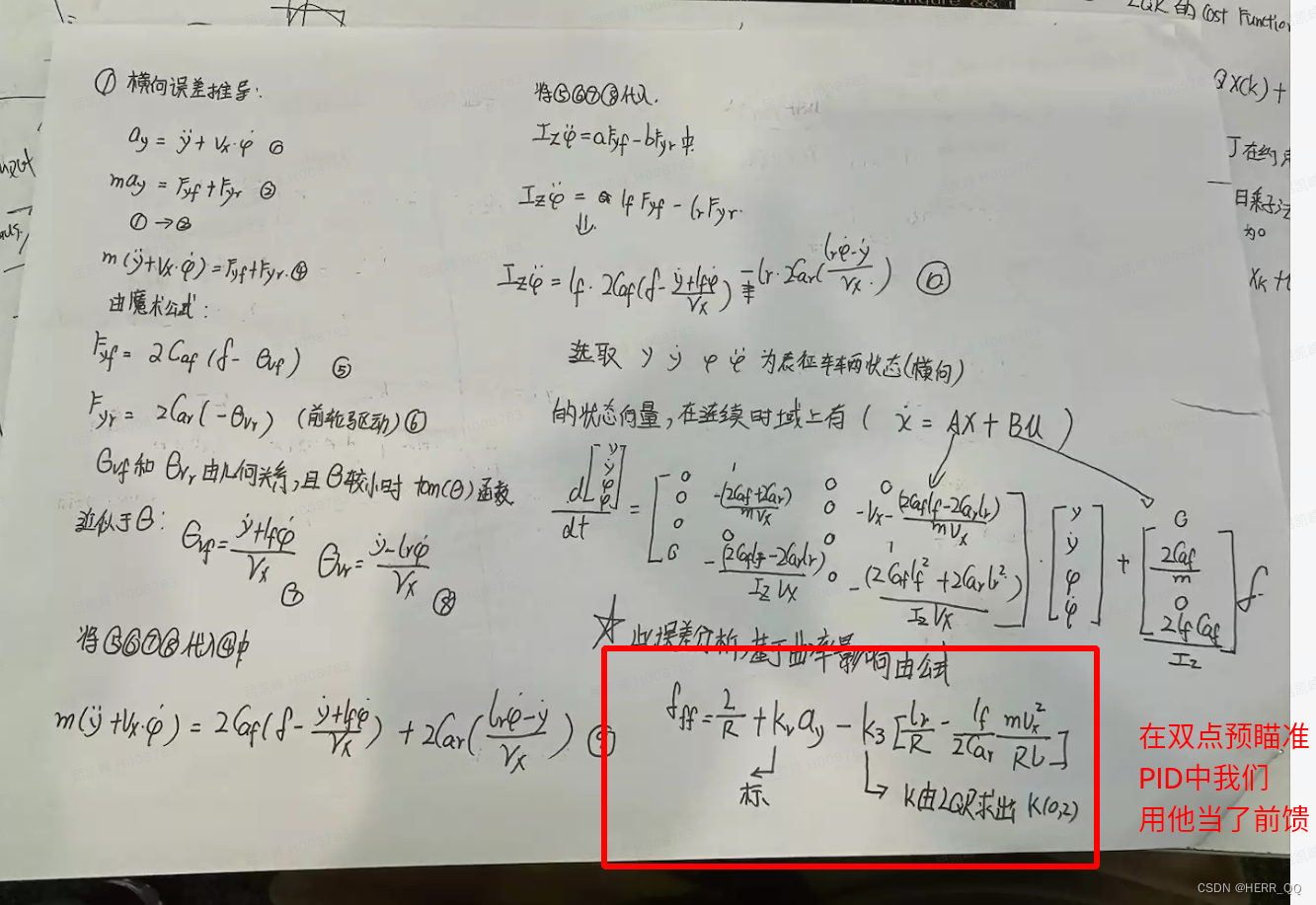
动力学
并联pid
- 预瞄 2个点 近:lateraldisdiff lateraldisdiffrate 远headingdiff headingdiffrate
- yawrate 要稳 pd要控制好
- 找瞄准点用几何法
串联pid
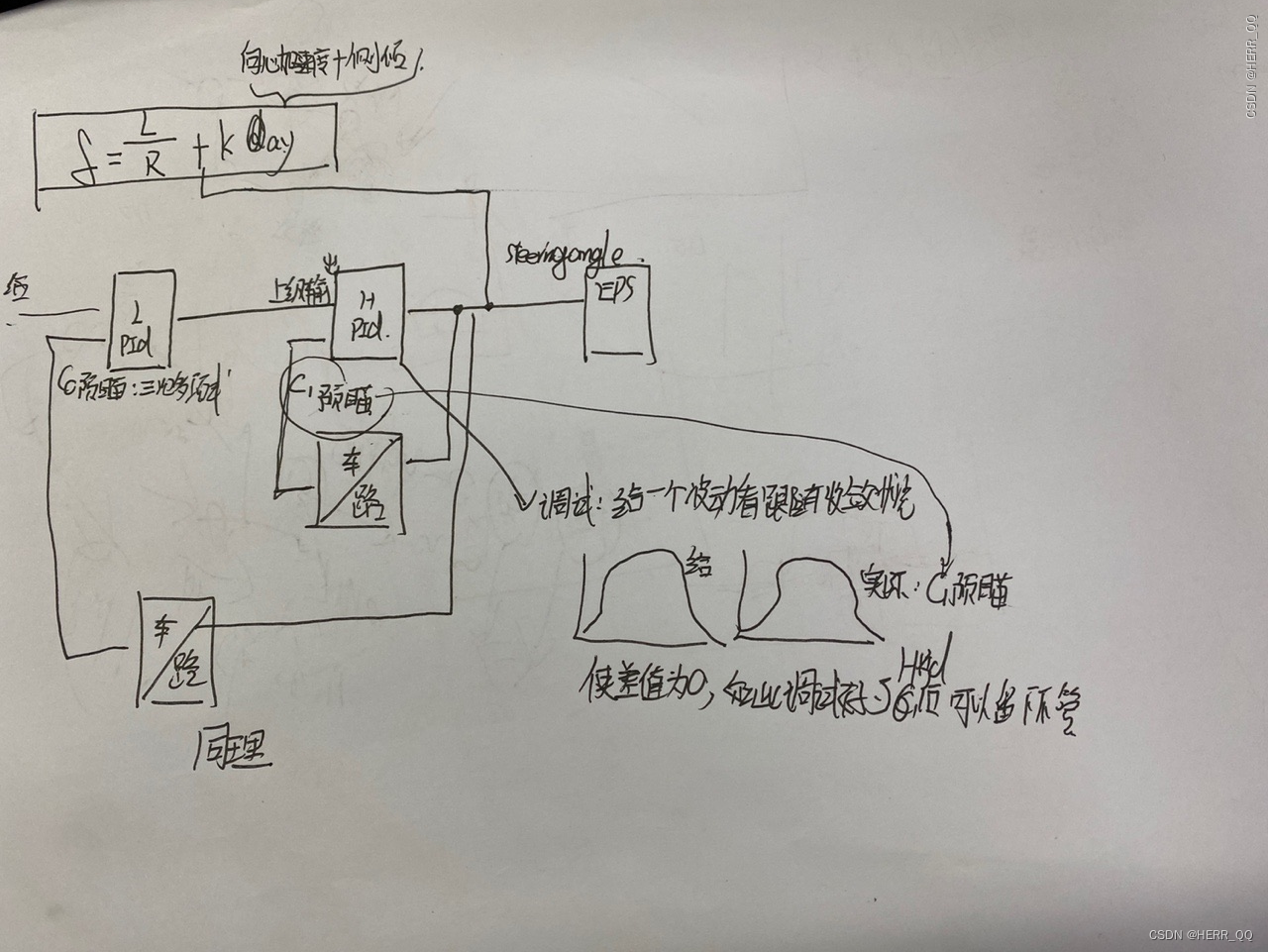
MPC控制横向 pid纵向
(纵向mpc osqp见另一篇文章的demo)https://blog.csdn.net/weixin_46479223/article/details/135107257
会找投影点 预瞄要选好 用acado osqp ,具体模型一会更新
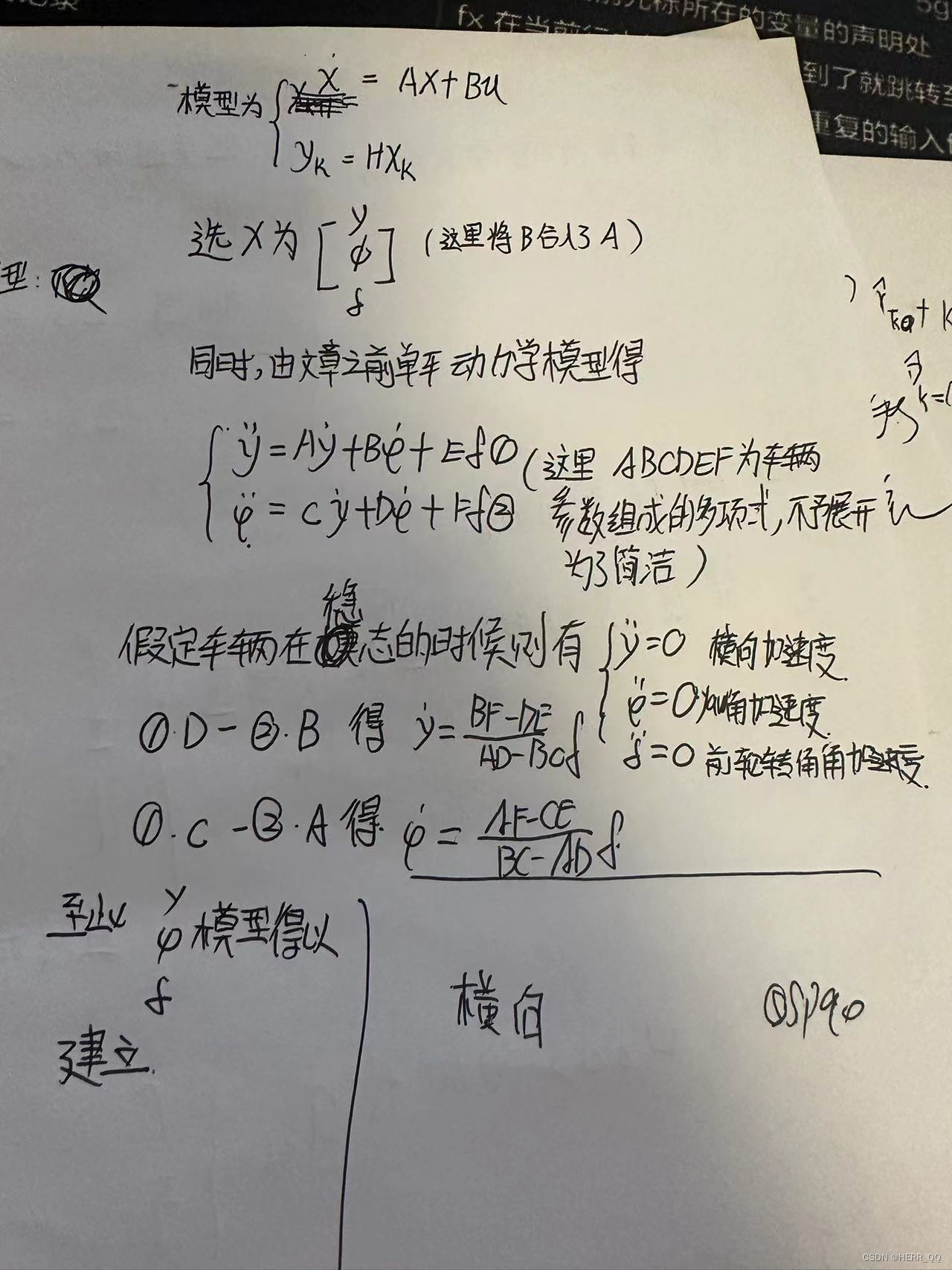
模型推导
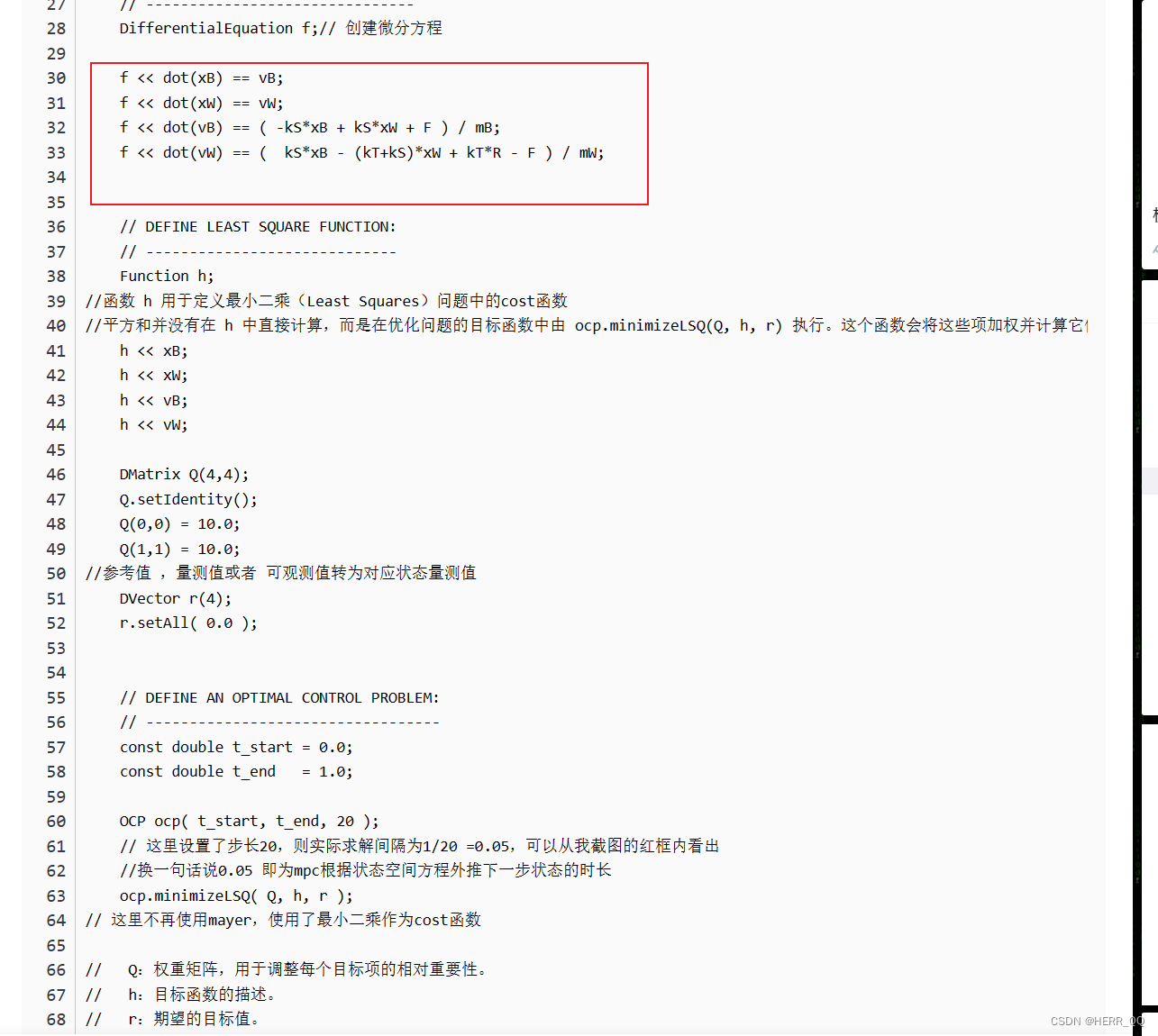
在我的文章Acado:https://blog.csdn.net/weixin_46479223/article/details/133743263的实例中展示了acado如何求解mpc问题
可见acado很方便,直接给出车辆模型的微分方程,以及求解时域(步长)、约束、和目标函数就可以生成相关代码。
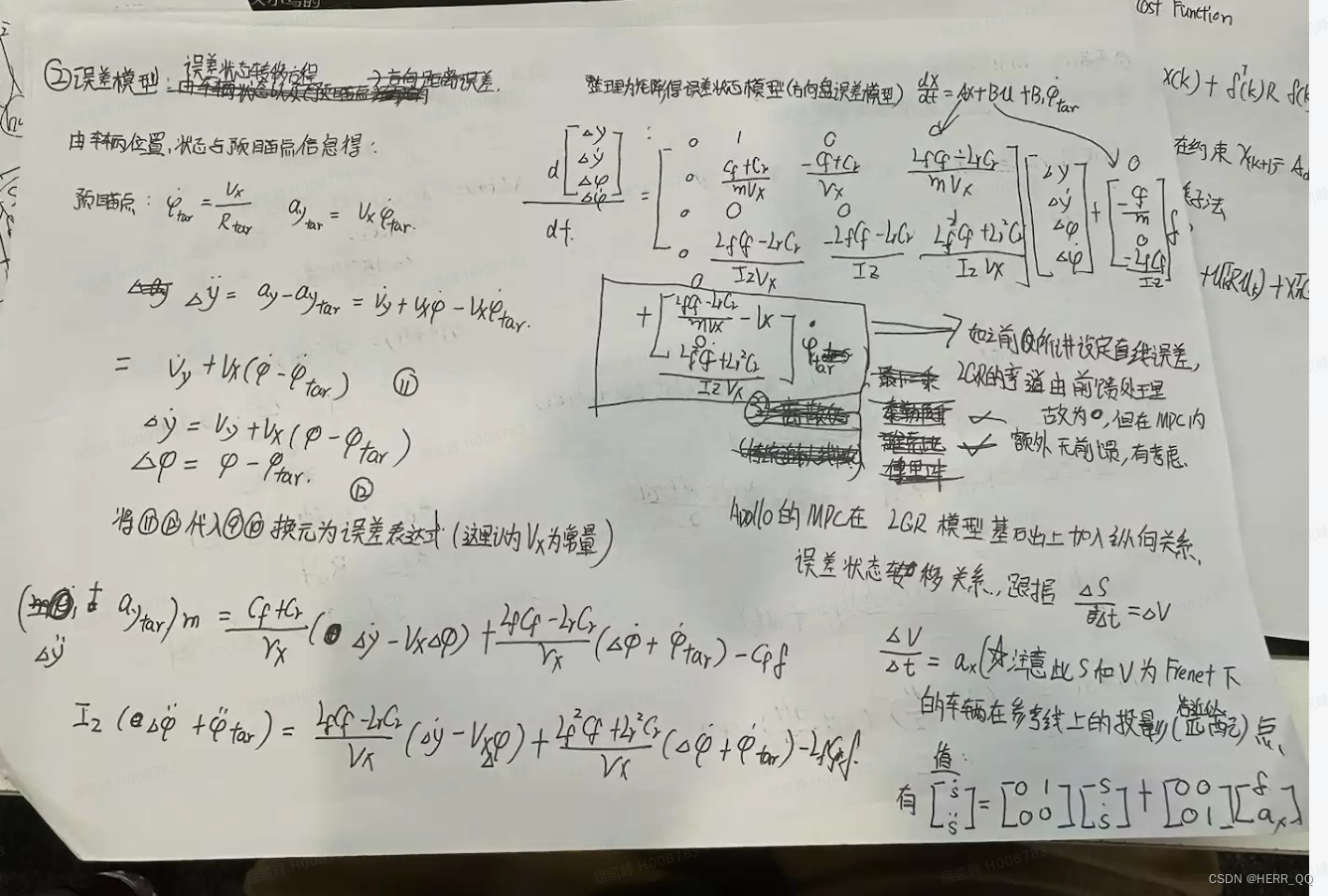
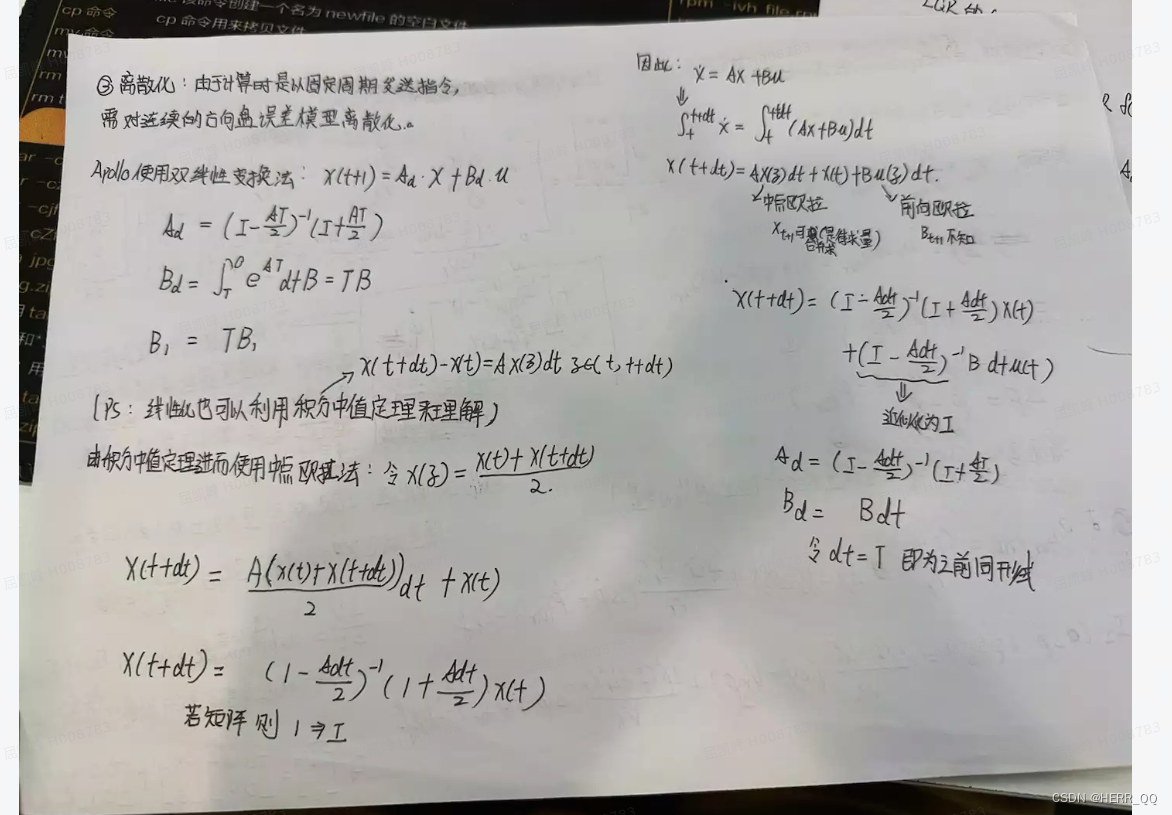
因此我们直接得出状态量之间的递推表达关系即可(状态转移方程),推导如下(当然也可以使用之前的动力学和运动学的推导来建立mpc,这里展示使用的另一种横向模型)
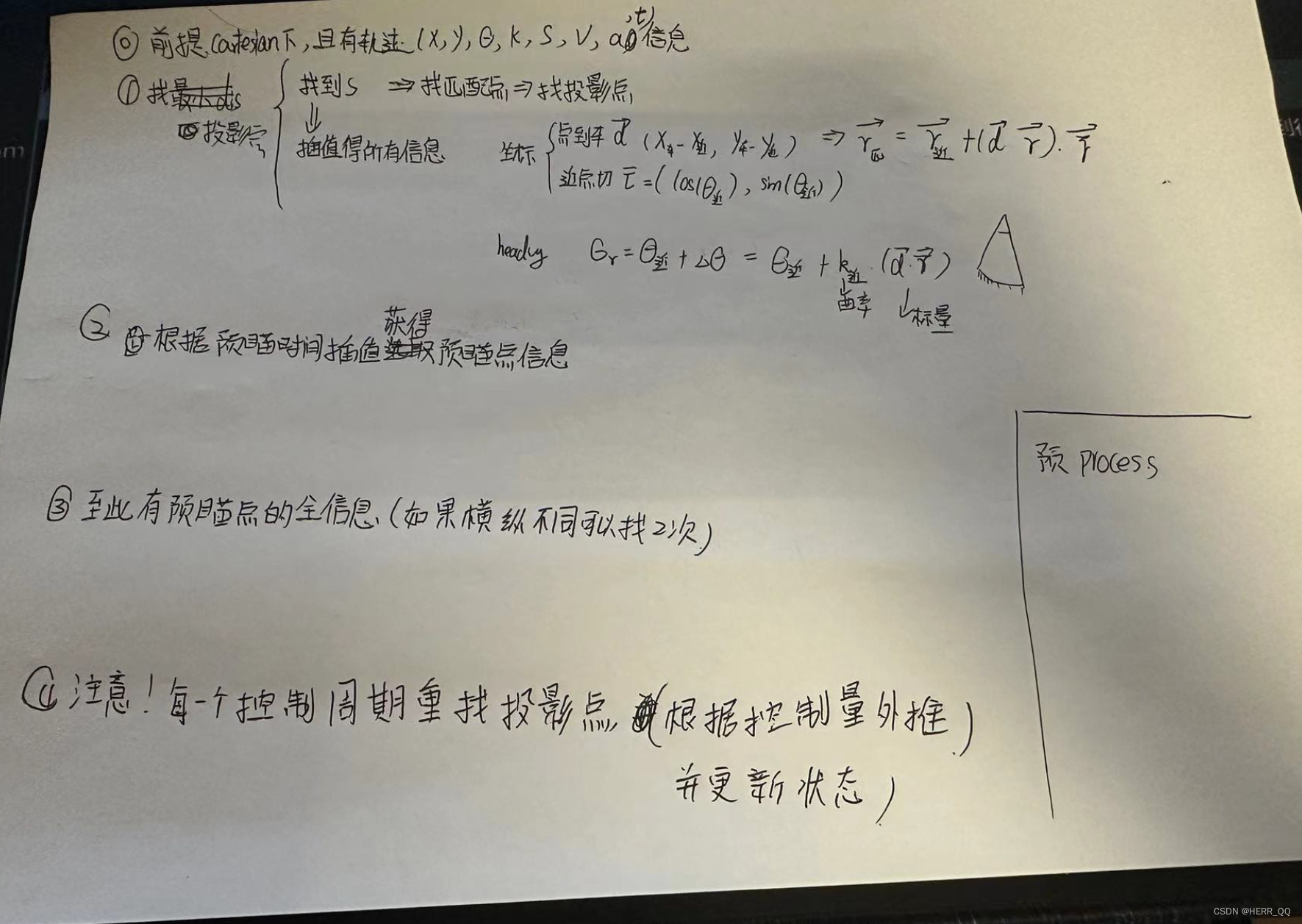
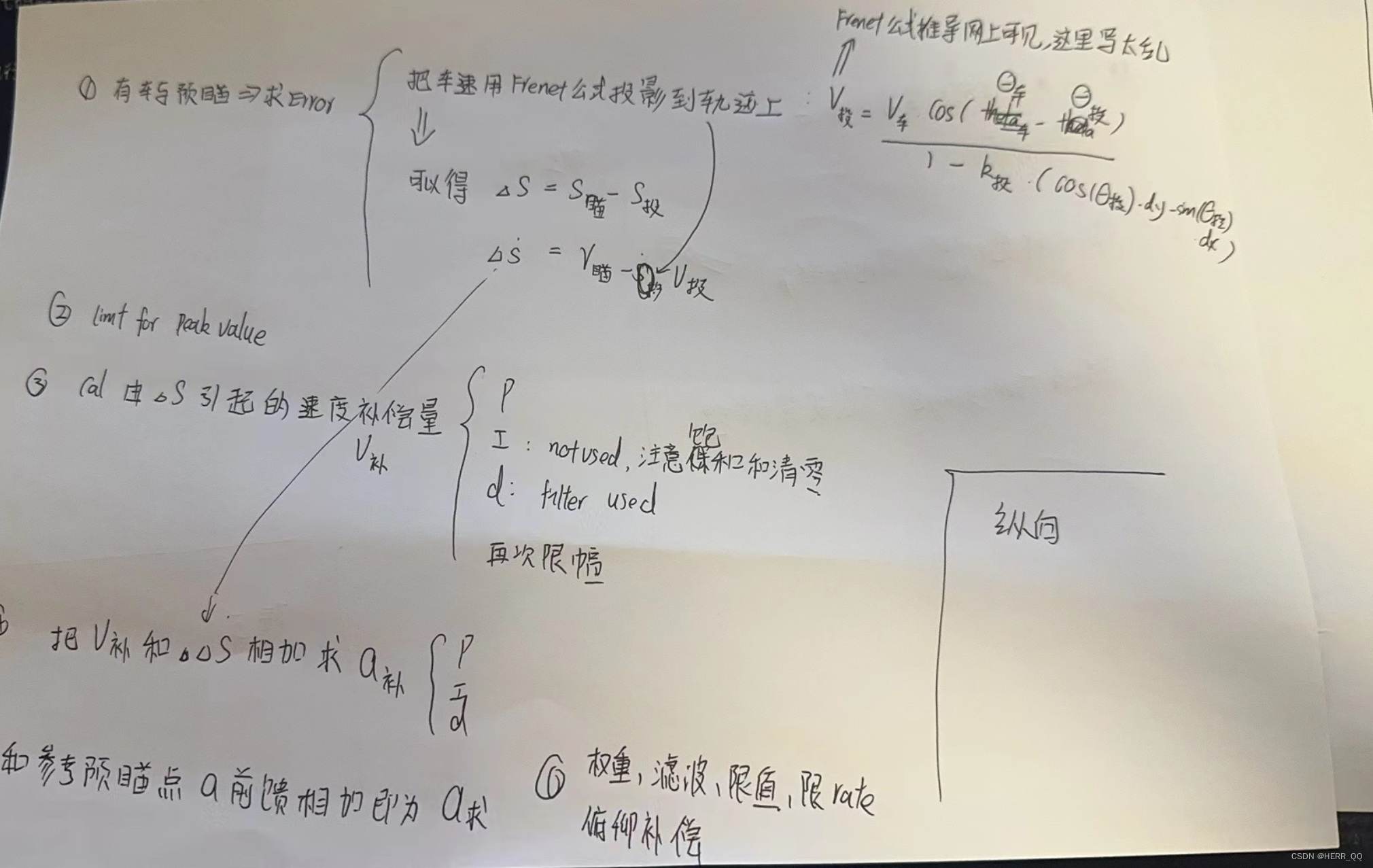
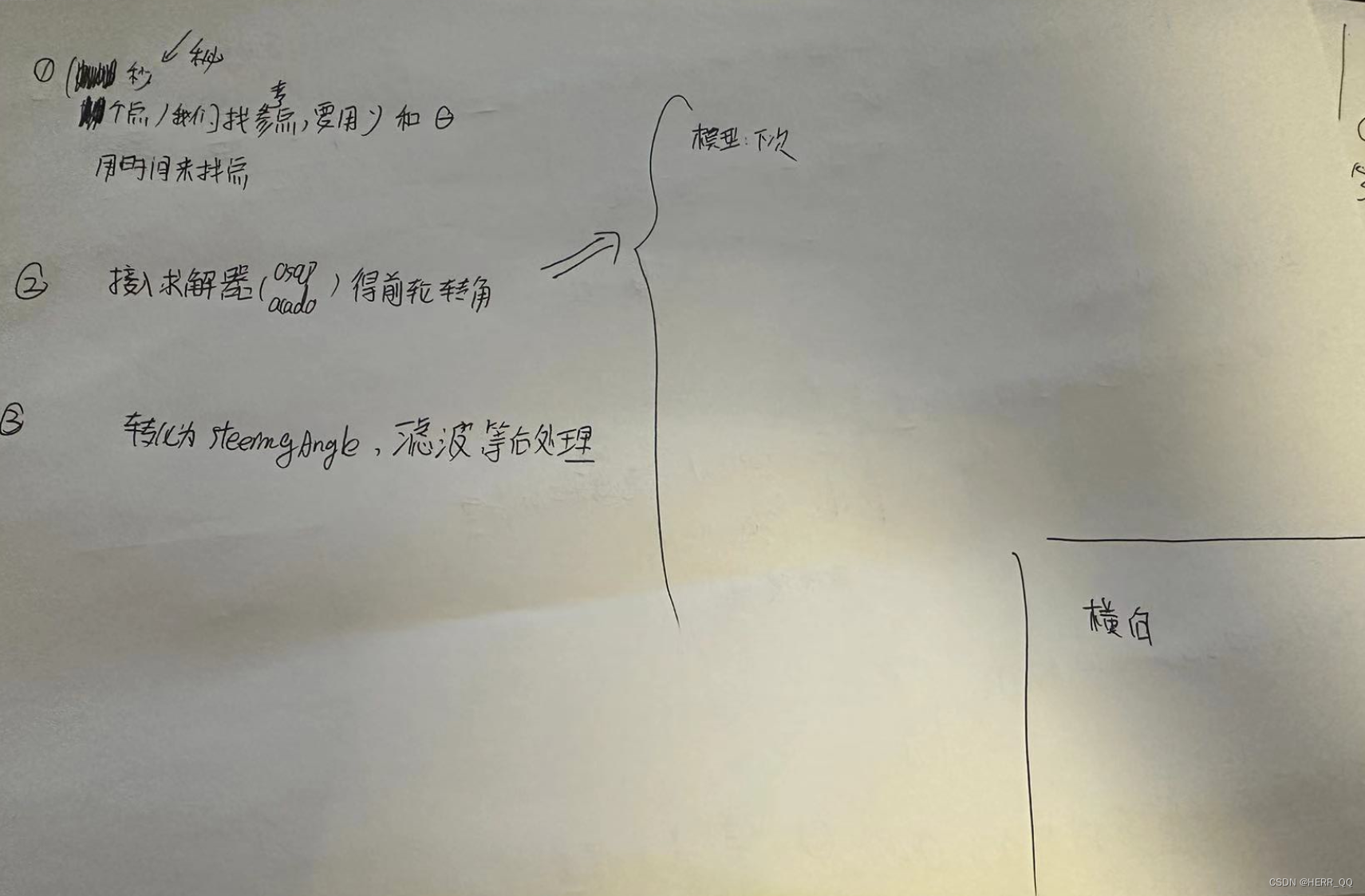
以下是除了模型之外的,mpc控制部分的处理(找投影点,预瞄点),以及纵向pid的设置
其他:
-颠簸
-手力
-控制接口转化
-握手
-滤波
-限幅
-限rate
-侧倾
-前置车道线处理
-激活退方向盘稳定渐入渐出
-canoe ape分析
-matlab回放 ros回放
-线性化方法
- usw.
- pid传递函数根轨迹和Nyquist图(工程中直接调参) 现代控制状态空间方法
- 最小二乘正规方程梯度下降
- 找点 向量法:https://zhuanlan.zhihu.com/p/429676544
- 点线距离
- kkt
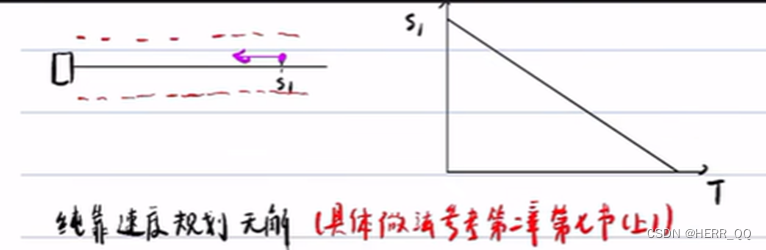
临时EM planner
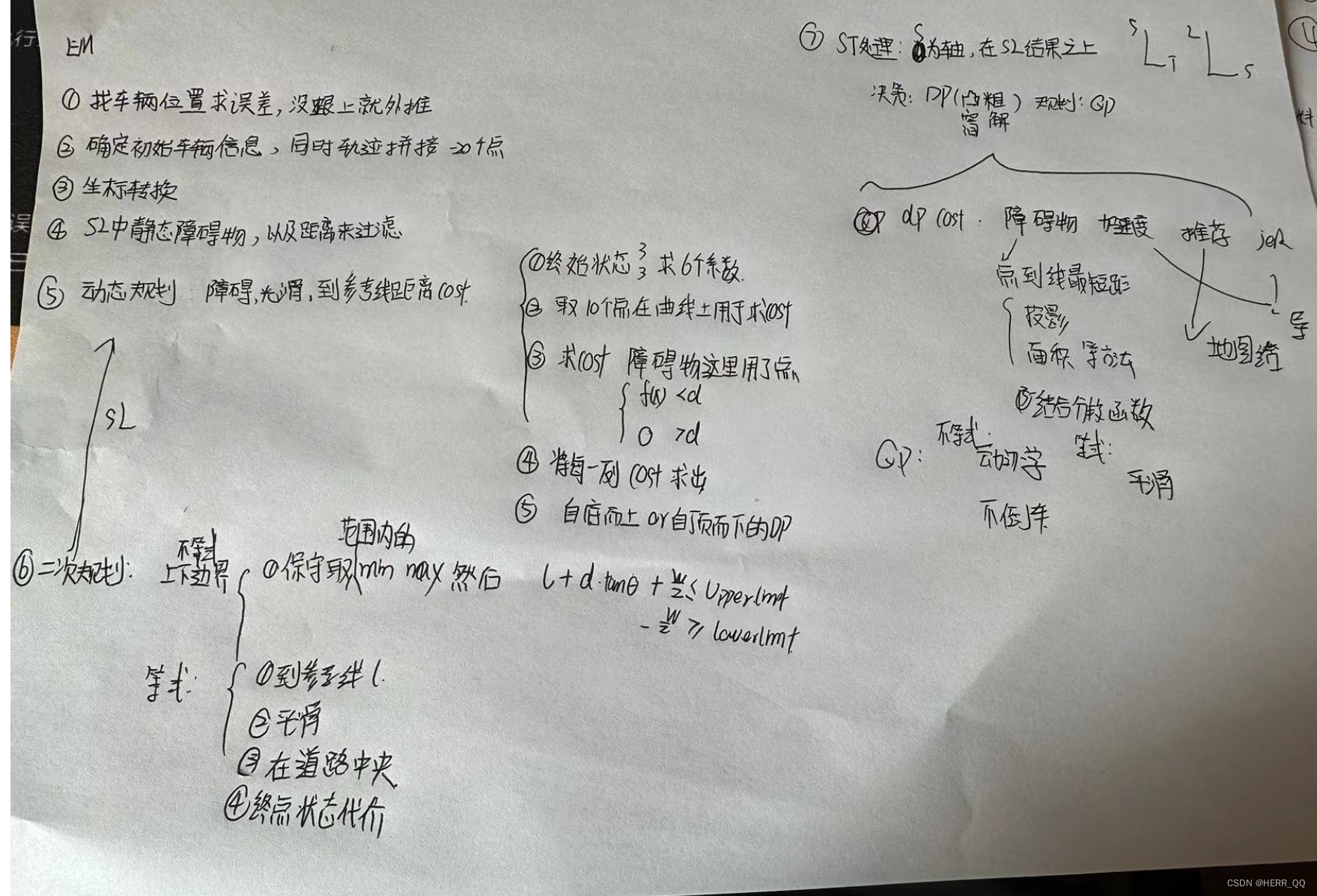
补充:找起点时间要顺延一个planning cycle
- 轨迹筛选、碰撞检测
- 巡航为四次多项式 没有终点s
- frenet下的平滑不代表卡迪尔下平滑
注意 以下图片均出自于老王 bilibili

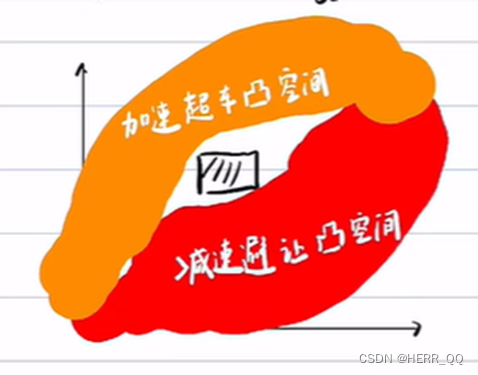
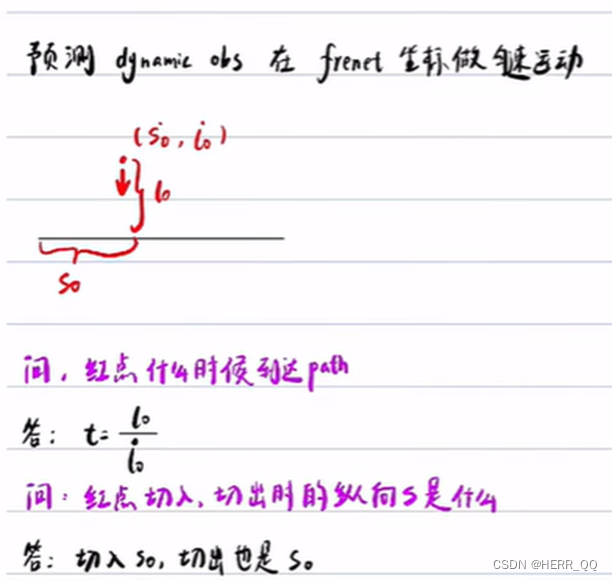
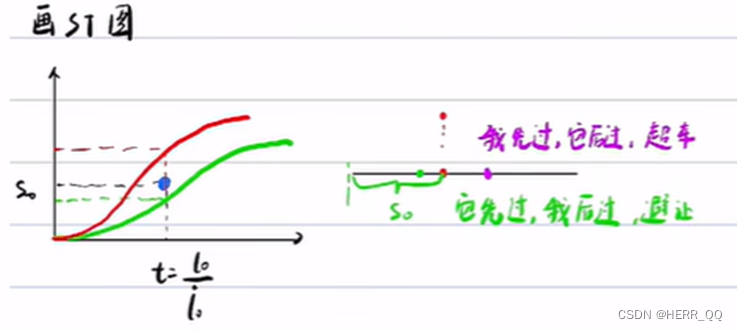
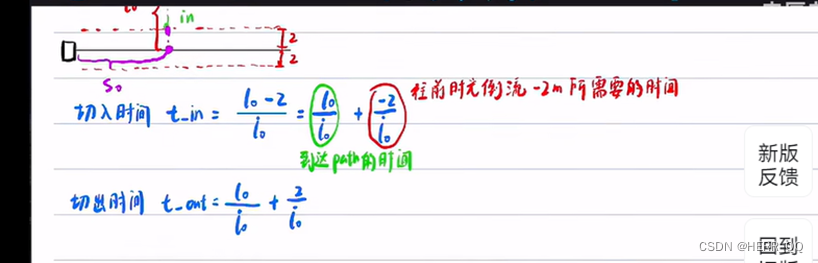
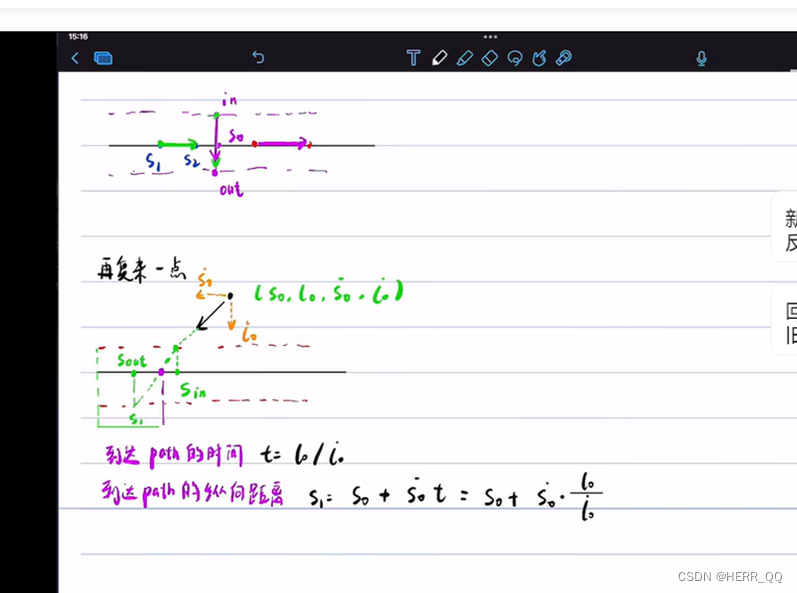
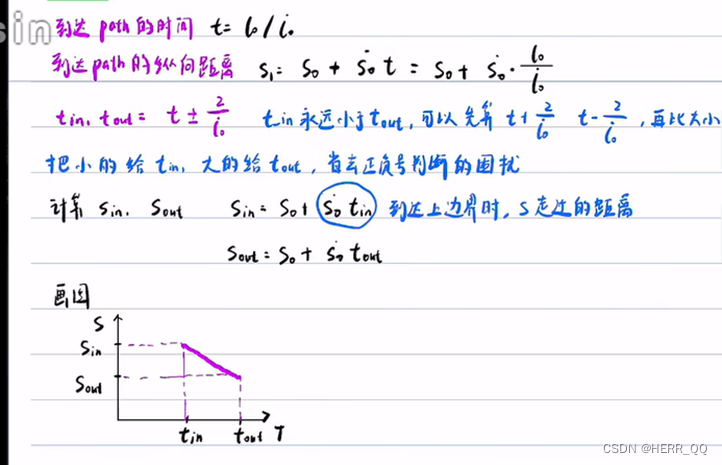
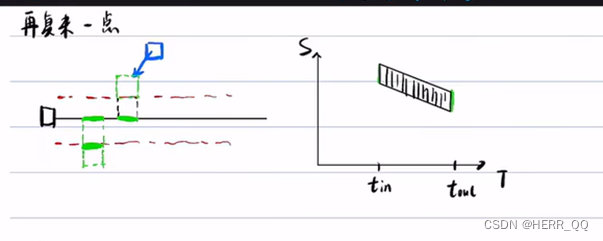
特殊情况

以前的杂乱总结版本
最后听讲(自己看)
临时 cpp gpt d 算法简易版本
之前理解 d就是带有权重的bfs问题,所以一直没有去认真实现代码,后来做了很多网格问题,但发现和真的图bfs还有使用优先队列的d还有细节要注意,见和gpt的问答,注意这段代码没有记录父节点
#include <iostream>
#include <vector>
#include <queue>
#include <limits>using namespace std;#define INF numeric_limits<int>::max()// 定义图的邻接矩阵表示法
typedef vector<vector<int>> Graph;// Dijkstra算法
void dijkstra(const Graph& graph, int start, vector<int>& distances, vector<int>& parents) {int n = graph.size(); // 图的节点数distances.resize(n, INF); // 初始化距离数组,全部设置为无穷大parents.resize(n, -1); // 初始化父节点数组,全部设置为-1vector<bool> visited(n, false); // 记录节点是否已被访问distances[start] = 0; // 起始节点到自身的距离为0// 创建优先队列,用于按照距离排序节点priority_queue<pair<int, int>, vector<pair<int, int>>, greater<pair<int, int>>> pq;pq.push({0, start}); // 将起始节点加入优先队列while (!pq.empty()) {// 从优先队列中取出当前距离最小的节点int curr_dist = pq.top().first;int curr_node = pq.top().second;pq.pop();// 如果该节点已被访问,则跳过if (visited[curr_node]) continue;// 将该节点标记为已访问visited[curr_node] = true;// 遍历当前节点的所有邻居节点for (int neighbor = 0; neighbor < n; ++neighbor) {// 如果当前节点到邻居节点的距离更短,则更新距离数组、父节点数组并将邻居节点加入优先队列if (graph[curr_node][neighbor] != 0 && distances[curr_node] + graph[curr_node][neighbor] < distances[neighbor]) {distances[neighbor] = distances[curr_node] + graph[curr_node][neighbor];parents[neighbor] = curr_node; // 更新邻居节点的父节点pq.push({distances[neighbor], neighbor});}}}
}// 输出最短路径
void printShortestPath(const vector<int>& parents, int node) {if (parents[node] == -1) {cout << node;return;}printShortestPath(parents, parents[node]);cout << " -> " << node;
}int main() {// 定义图的邻接矩阵Graph graph = {{0, 4, 0, 0, 0, 0, 0, 8, 0},{4, 0, 8, 0, 0, 0, 0, 11, 0},{0, 8, 0, 7, 0, 4, 0, 0, 2},{0, 0, 7, 0, 9, 14, 0, 0, 0},{0, 0, 0, 9, 0, 10, 0, 0, 0},{0, 0, 4, 14, 10, 0, 2, 0, 0},{0, 0, 0, 0, 0, 2, 0, 1, 6},{8, 11, 0, 0, 0, 0, 1, 0, 7},{0, 0, 2, 0, 0, 0, 6, 7, 0}};int start_node = 0; // 设置起始节点// 使用Dijkstra算法计算起始节点到所有节点的最短距离和记录父节点vector<int> distances;vector<int> parents;dijkstra(graph, start_node, distances, parents);// 输出最短路径cout << "Shortest paths from node " << start_node << ":\n";for (int i = 0; i < graph.size(); ++i) {cout << "Node " << start_node << " to Node " << i << ": ";printShortestPath(parents, i);cout << " (distance: " << distances[i] << ")" << endl;}return 0;
}//QKF:如果每次向qp里面push相邻的节点 ,那么qp 里面可能存在相同的节点 是通过 if (visited[curr_node]) continue;跳过去的嘛//GPT:是的,如果每次向优先队列 pq 中 push 相邻的节点,可能会导致 pq 中存在相同的节点。在这种情况下,通过 if (visited[curr_node]) continue; 来跳过已经访问过的节点是有必要的。//在 Dijkstra 算法中,如果不跳过已经访问过的节点,可能会导致多次将相同节点加入优先队列,并且每次加入的节点可能会有不同的距离值。这样会导致算法不断重新考虑相同的节点,从而增加了计算的开销,而且可能会导致错误的最短路径结果。//通过在代码中添加 if (visited[curr_node]) continue; 这样的语句,可以确保在每次迭代中只处理未被访问过的节点,避免了重复处理相同节点的情况,从而提高了算法的效率。
这篇关于【algorithm】自动驾驶常见常考的几个模型和推导,顺便总结自己遇到的考题经验不断更新之———控制版的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








