本文主要是介绍随机森林 bagging袋装法(基于bootstrap重抽样自举法)的原理与python实现——机器学习笔记之集成学习 Part 1,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
* * * The Machine Learning Noting Series * * *
导航
1 Bootstrap重抽样自举法
2 袋装法(Bagging)
3 随机森林
4 python实现——一个实例
⚫袋装法和随机森林过程基本一样,都是根据bootstrap的一系列样本分别建立决策树,然后用这些决策树投票出结果。最大区别,也就是随机森林更好的原因在于:随机森林在建立决策树时的分组变量存在随机性。
⚫建立大量模型进行投票得出的估计为真值的无偏及一致估计,由此得到的测试误差也是泛化误差真值的无偏估计。

1 Bootstrap重抽样自举法
🍿🍿🍿Bootstrap重抽样自举法的原理与python实现的详细说明,点击参考我的这篇文章。简单介绍:
概念:重抽样自举法(Bootstrap)也叫做自助抽样法或者0.632自举法。
方法:对N个样本,进行B次有放回的重抽样形成B个样本,每个样本包含N个数据。
0.632?:每个样本,每次抽样被抽到的概率为1/N,抽不到的概率为1-1/N,因此N次均未被抽到的概率为,故整体上也有1-36.8%=63.2%的样本可作为自举样本。
作用:用于估计统计量的标准误(srandard error),比如回归中回归系数的标准误。
2 袋装法(Bagging)
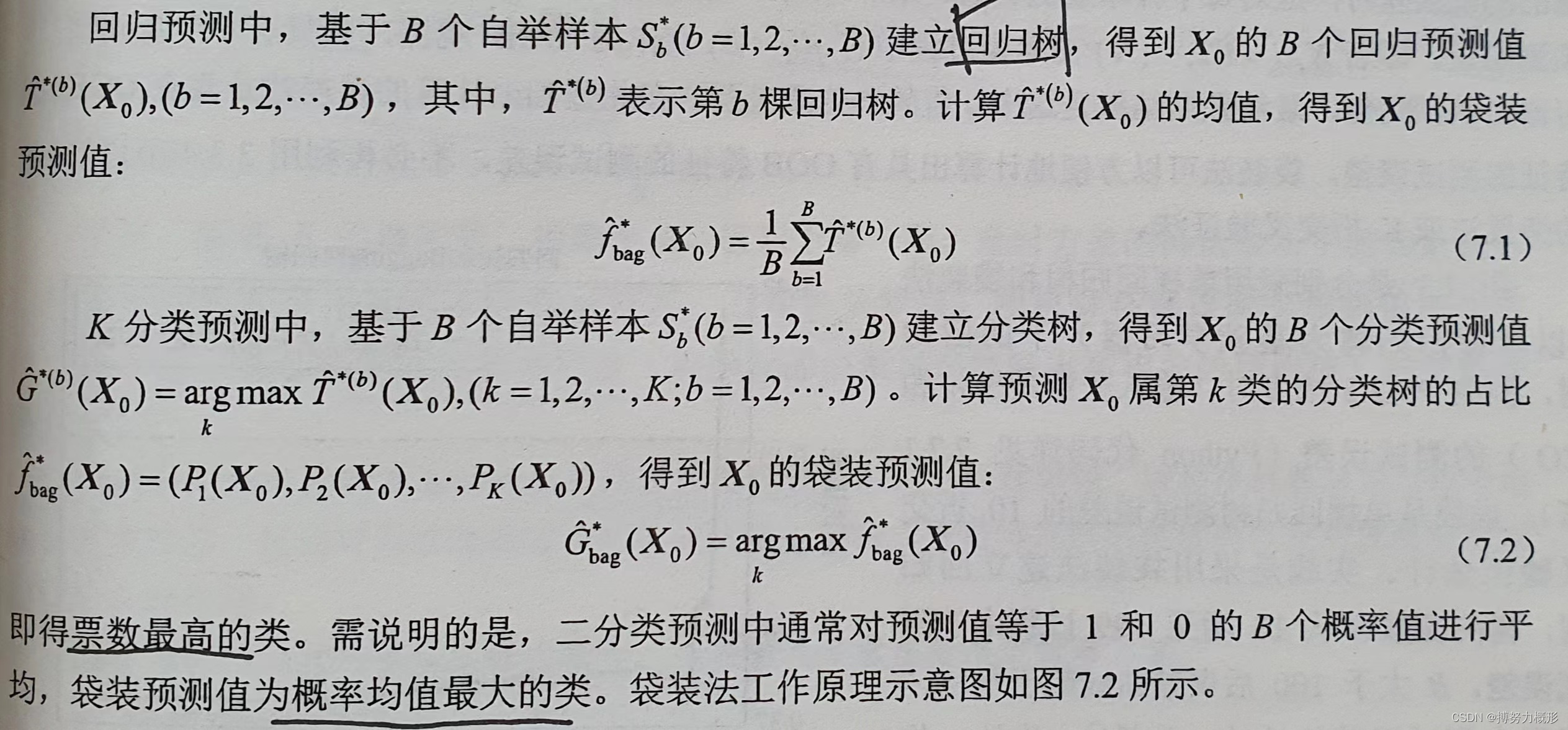
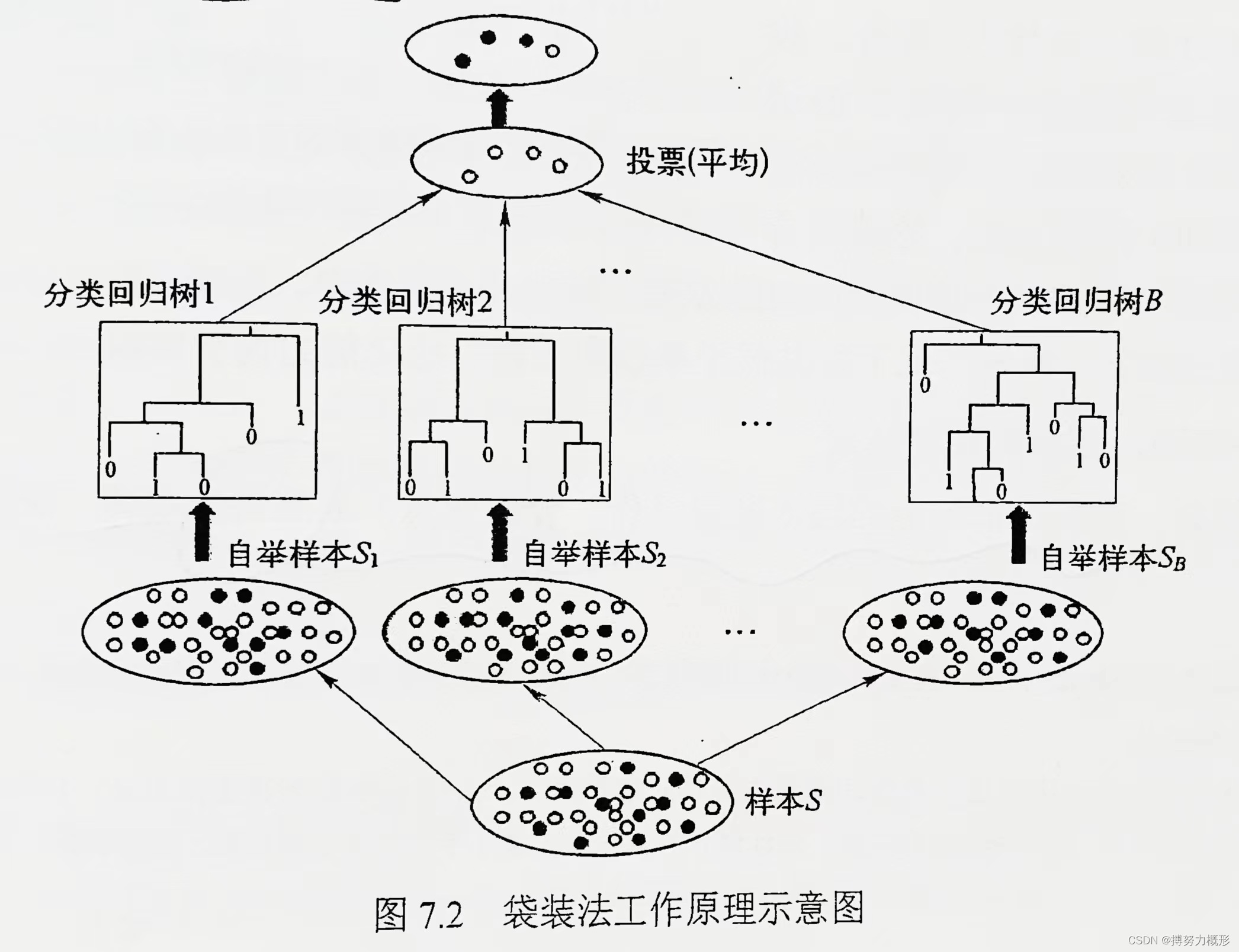
说明:袋装法Bagging 为Bootstrap Aggregating 的缩写,在单个学习器(基于单个bootstrap样本构建的模型,这里是决策树,也可以是贝叶斯分类器,K-邻近等模型)具有高方差和低偏差时很有效。
方法:
测试误差的估计:
- 应对每个样本观测,得到其作为OOB时基础学习器所给出的预测结果。即若样本观测在建模过程中有q次作为OOB观测,则只有q个基础学习器提供预测值,最终预测结果是这个q值的均值或投票。
- 袋装法可方便的计算出OOB测试误差,而不必再用其他样本划分方法。
- 自举次数越多,即建立的估计模型越多,越有助于降低方差,消除测试误差计算结果的随机性。
输入变量重要性的度量:
基于多棵树计算输入变量重要性:计算B棵树异质性下降总和,总和的最大值对应的输入变量重要性最高。
3 随机森林
原理:独立同分布的B个预测值(由上文的B个学习器产生),若其方差为
,两两相关系数为
,那么投票结果,即Z的均值的方差为:
袋装法通过增加B来减少方差(上式结果后半部分),在此次基础上,随机森林则进一步通过减少相关性(降低树间的相似性)来降低方差(上式结果前半部分)。
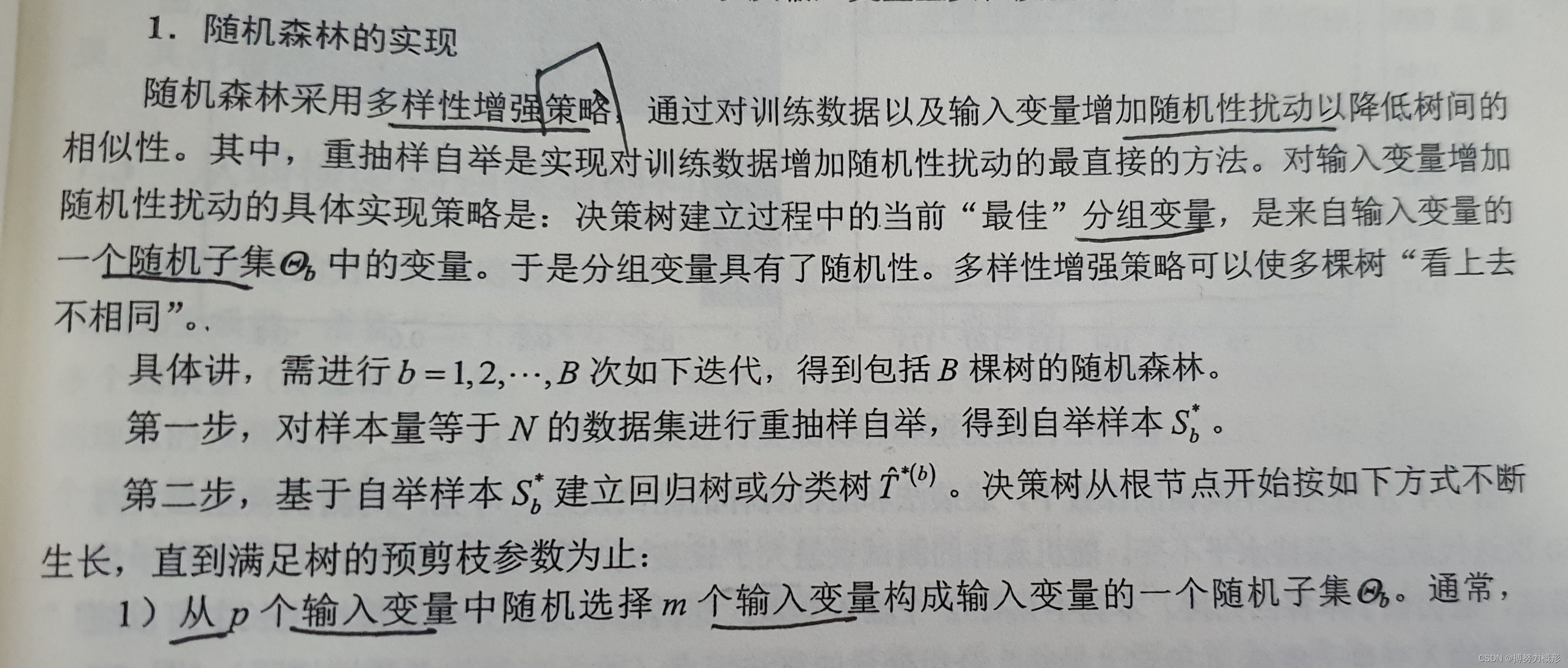
随机森林的随机体现在:①样本随机性,来自于Bootstrap的随机抽样;②属性随机性,树的生成随机选择分类属性。
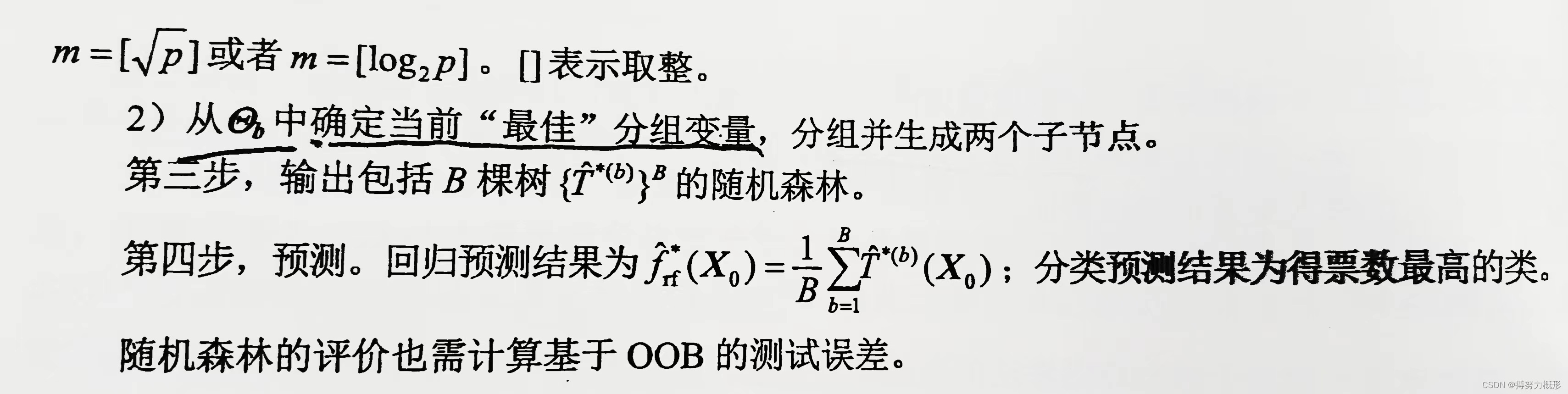
方法:
输入变量重要性的度量:
基本思路是,若某个变量影响力大,那么同样的随机噪声,该变量随模型OBB结果影响更大。为了测度重要性,首先计算的OOB测试误差,记为
。为了测度第j个输入变量对输出变量的重要性:
1) 随机打乱的OOB在第j个输入变量上的取值顺序,重新计算
基于OOB的测试误差,记为
.
2) 计算第j个输入变量添加噪声后的OOB误差的变化:
.
重复上述步骤B次,得到B个,计算其均值
,这就是第j个输入变量添加噪声后随机森林的OOB误差的变化,该误差值越大,表明变量越重要。
随机森林和袋装法的比较:
在输入变量较多的情况下,随机森林的优势会更加明显。下图为4个输入变量时不同方法的测试误差变化情况,可以看出随着树数的增加,随机森林的误差最小。具体可见下面的python实例。
4 python实现——一个实例
下面的例子同时实现袋装法和随机森林,并比较其性能。该例子为PM2.5浓度的回归预测,需要数据可向我索要。
#本章需导入的模块
import numpy as np
import pandas as pd
import warnings
warnings.filterwarnings(action = 'ignore')
import matplotlib.pyplot as plt
%matplotlib inline
plt.rcParams['font.sans-serif']=['SimHei'] #解决中文显示乱码问题
plt.rcParams['axes.unicode_minus']=False
from sklearn.model_selection import train_test_split,KFold,cross_val_score
from sklearn import tree
import sklearn.linear_model as LM
from sklearn import ensemble
from sklearn.datasets import make_classification,make_circles,make_regression
from sklearn.metrics import zero_one_loss,r2_score,mean_squared_error
import xgboost as xgb# 准备数据
data=pd.read_excel('北京市空气质量数据.xlsx')
data=data.replace(0,np.NaN)
data=data.dropna()
data=data.loc[(data['PM2.5']<=200) & (data['SO2']<=20)]
X=data[['SO2','CO']]
Y=data['PM2.5']
X0=np.array(X.mean()).reshape(1,-1)# 运行袋装法和随机森林
modelDTC = tree.DecisionTreeRegressor(max_depth=5,random_state=123)
dtrErr=1-cross_val_score(modelDTC,X,Y,cv=10,scoring='r2')
BagY0=[]
bagErr=[]
rfErr=[]
rfY0=[]
for b in np.arange(10,200):Bag=ensemble.BaggingRegressor(base_estimator=modelDTC,n_estimators=b,oob_score=True,random_state=123,bootstrap=True)Bag.fit(X,Y)bagErr.append(1-Bag.oob_score_)BagY0.append(float(Bag.predict(X0)))RF=ensemble.RandomForestRegressor(n_estimators=b,oob_score=True,random_state=123,bootstrap=True,max_features="sqrt")RF.fit(X,Y) rfErr.append(1-RF.oob_score_) rfY0.append(float(RF.predict(X0)))# 可视化结果
fig,axes=plt.subplots(nrows=1,ncols=2,figsize=(12,4))
axes[0].axhline(y=dtrErr.mean(),linestyle='-.',label='回归树')
axes[0].plot(np.arange(10,200),bagErr,linestyle='-',label='Bagging回归树(方差=%.3f)'%np.var(BagY0))
axes[0].plot(np.arange(10,200),rfErr,linestyle='--',label='随机森林(方差=%.3f)'%np.var(rfY0))
axes[0].set_title("回归树、Bagging回归树和随机森林")
axes[0].set_xlabel("树的棵树B")
axes[0].set_ylabel("测试误差")
axes[0].legend()axes[1].barh(y=(1,2,3,4),width=RF.feature_importances_,tick_label=X.columns)
axes[1].set_title("输入变量的重要性")
for x,y in enumerate(RF.feature_importances_): axes[1].text(y+0.01,x+1,'%s' %round(y,3),ha='center')结果如下图所示,可以看出,当输入变量较多时,随着树数的增加,随机森林的优势逐渐显现,测试误差更低。

这篇关于随机森林 bagging袋装法(基于bootstrap重抽样自举法)的原理与python实现——机器学习笔记之集成学习 Part 1的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




