本文主要是介绍智能芯时代 | 极海扫地机器人主控+通信模块方案,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
据中研产业研究院《2023-2028年中国扫地机器人行业投资战略研究报告》数据显示,目前国内扫地机器人市场渗透率不足5%。扫地机器人作为具有高端智能制造和消费属性的产品,随着互联网以及人工智能技术的不断发展,市场化程度将逐渐提高。预计2024年我国扫地机器人零售量将达724万台,零售额将达129亿元,市场发展潜力巨大。
近年来,随着生活、商务场景的行为变化,新一代消费者对智能家居替代体力劳动的需求日趋迫切;另外在国家技术产业政策的积极推动下,智能扫地机器人将迎来更加智能化、自动化的技术变革,这也意味起着核心作用的主控芯片也将迎来性能的革新换代。
智能扫地机器人应用方案
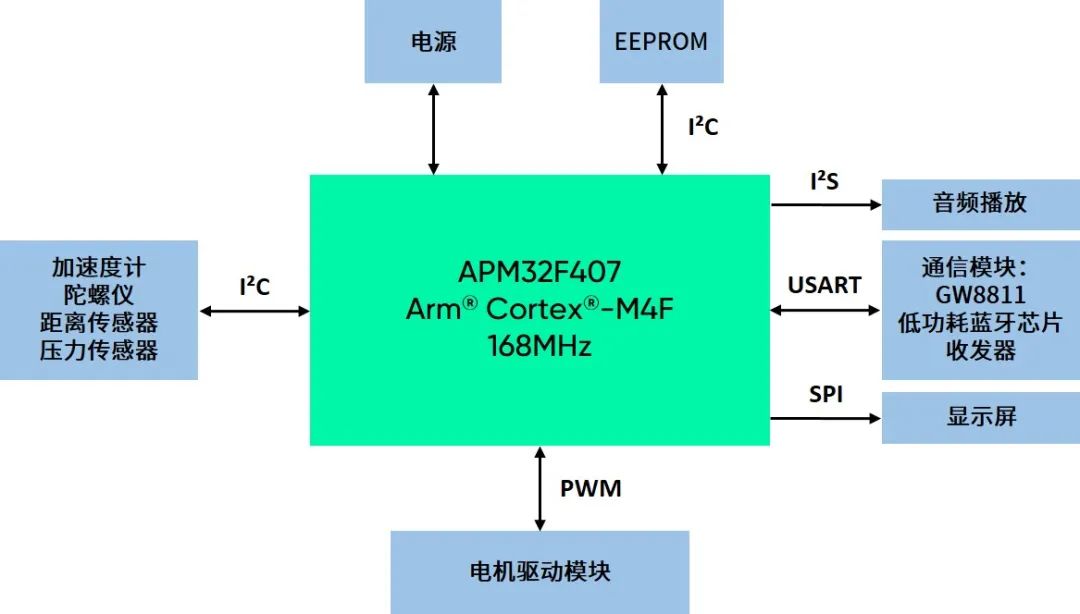
极海智能扫地机器人应用方案,主控模块采用了APM32F407系列高性能MCU,该系列芯片拥有高主频、高性能、高集成、外设资源丰富等特点,结合GW8811系列低功耗蓝牙4.2芯片,可实现丰富、精准且高效的家居定位清扫功能。
高性能 · 高效核芯保障
APM32F407基于Arm® Cortex®-M4F内核,主频达168MHz,内置16通道DMA、CRC计算模块和FPU浮点运算单元,提供强大运算处理能力,在信号速度与精度上更具优势;Flash高达1MB,可存入大量地图数据,节省客户硬件成本;拥有192+4KB SRAM,且支持外挂SDRAM,满足扫地机的软件运行需求。内置12位高速ADC和高精度PWM,有助于提升扫地机运行的灵敏性和精准度,保障扫地机对指令的及时处理以及对路线的精准规划。
丰富外设 · 功能自由拓展
APM32F407集成RTC、PWM、SDIO等数字外设,提供丰富的信号连接功能,如RTC支持定时预约唤醒工作,双PWM输出可用于控制不同的直流电机以实现高效的吸尘清扫功能;SDIO供系统建立双向通讯连接等。内置CAN,U(S)ART,I2C,SPI,USB_OTG,以太网,DCI等多种通信接口,可供系统架设丰富的传感器与功能硬件,实现更全面的自动控制功能。
此外,通信模块采用GW8811系列低功耗蓝牙4.2芯片,集成高性能2.4GHz射频收发机、Flash 512KB,最大发射功率可达+4dBm,接收灵敏度-94dBm,集成UART,I2C,SPI,PWM等丰富的数字接口,支持外部蓝牙设备与内部MCU的实时通信,实现远程控制扫地机的开关;内置Balun及高效率DC-DC降压转换器,有利于缩小模块尺寸,降低产品成本;提供48位加密密钥并支持AES加密,保障产品通信安全。
低功耗 · 实现持久待机
APM32F407采用低功耗工艺,支持运行、待机、休眠三种超低功耗模式,可有效延长电池的使用寿命,实现持久待机,适应电池供电产品的低功耗应用需求。GW8811具有睡眠和深度睡眠两种模式,深度睡眠模式下电流低至1uA,在主控待机时自动切换模式,可有效优化智能扫地机器人的运行功耗。
这篇关于智能芯时代 | 极海扫地机器人主控+通信模块方案的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





