本文主要是介绍Apache IoTDB 查询引擎源码阅读——DataNode 上 DriverTask 调度与执行,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
背景
Apache IoTDB 查询引擎目前采用 MPP 架构,一条查询 SQL 大致会经历下图几个阶段:
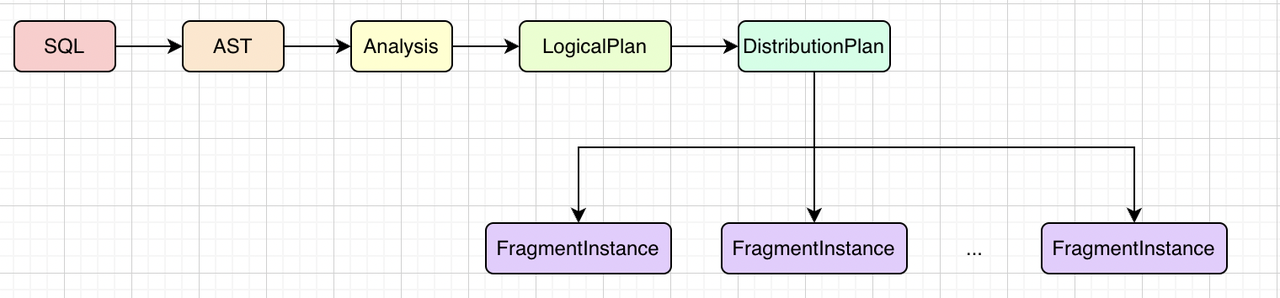
FragmentInstance 是分布式计划被拆分后实际分发到各个节点进行执行的实例。由于每个节点会同时接收来自于多个并发 Query 的多个 FragmentInstance,这些 FragmentInstance 在执行时可能由于等待上游数据而处于阻塞状态、或者数据就绪可以执行、或者超时需要被取消。因此,需要一个较为合理的调度策略,保证在分配给 FragmentInstance 的有限资源内,能够满足高并发的查询需求,同时尽可能避免出现饿死或者死锁情况。
在具体实现中,查询引擎里真正执行查询计算的算子树 Operator Tree 是类 Driver 的一个成员变量,Driver 负责控制Operator 的运行。DriverTask 是 Driver 的一层封装,也是调度模块真正调度的对象。一个 FragmentInstance 可能对应多个 Driver,而 Driver 与 DriverTask 是一一对应的。
本文主要介绍 Apache IoTDB 查询引擎在 DataNode 上如何调度和执行 DriverTask。相关代码位于包 org.apache.iotdb.db.mpp.execution.schedule
DriverTask 调度与执行
调度模块维护了两个队列:
ReadyQueue:处于 Ready 状态的 DriverTask 队列
TimeoutQueue:所有当前节点未结束的 DriverTask 按照超时时间排序的队列
同时处于 Blocked 状态的 DriverTask 会被放入集合 blockedTasks 进行记录。
总体而言,DriverTask 的调度执行参考了协程思想和操作系统任务调度机制。分配给查询引擎调度模块的线程数是固定的,可以通过配置项更改。来自于不同节点的 FragmentInstance 的 DriverTask 在 init 时会被加入 ReadyQueue。执行线程会不断拉取 ReadyQueue 队头的任务进行执行,每次只执行一个时间片,然后根据 DriverTask 的状态决定是否要将 DriverTask 重新放回 ReadyQueue。可以结合下图帮助理解:

DriverTask 完整的生命周期与状态
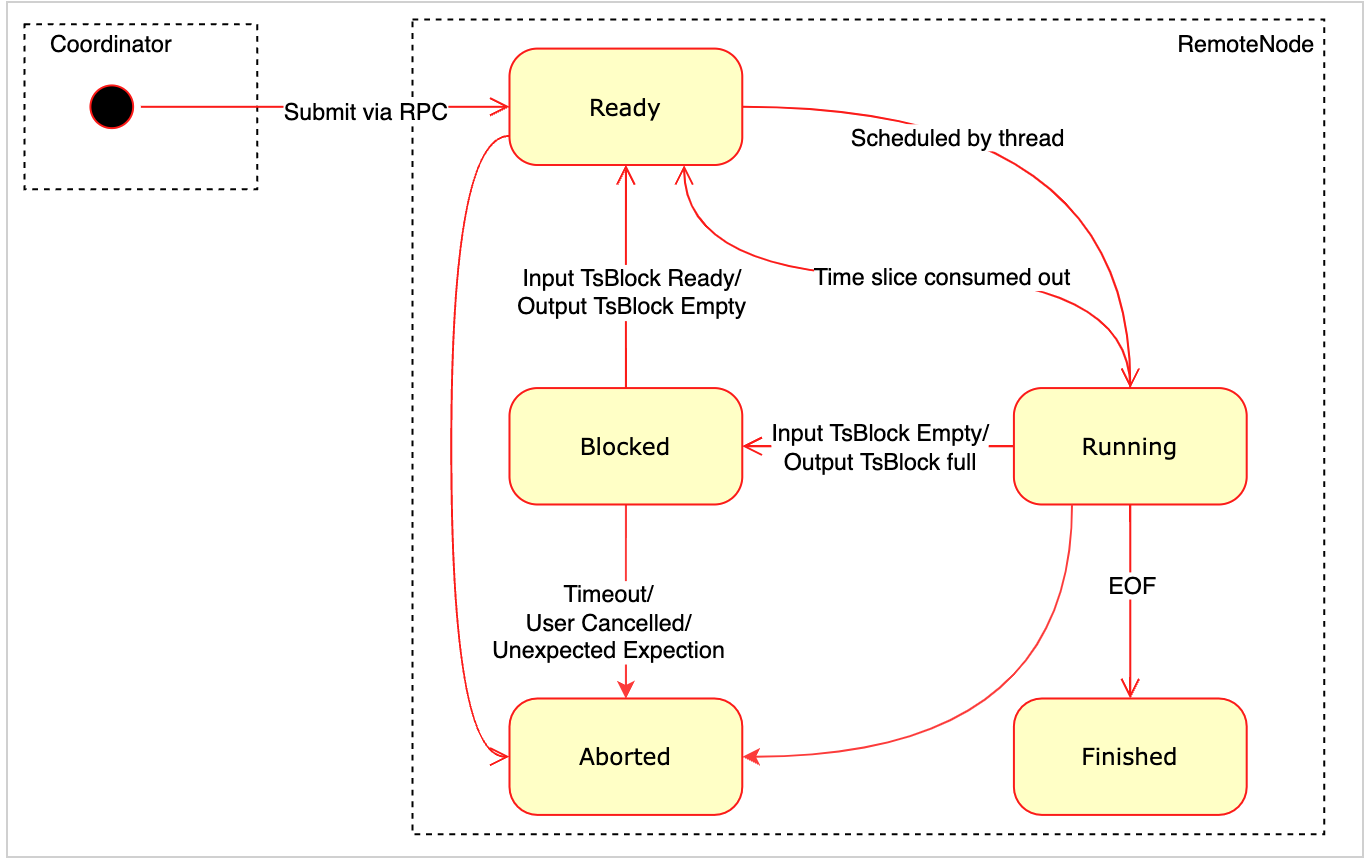
如上图所示,目前 DriverTask 的状态包括:
Ready:就绪状态。在以下场景,DriverTask 会处于 Ready 状态:
新建 DriverTask 时,状态会被设置为 Ready,然后加入到 ReadyQueue 中。
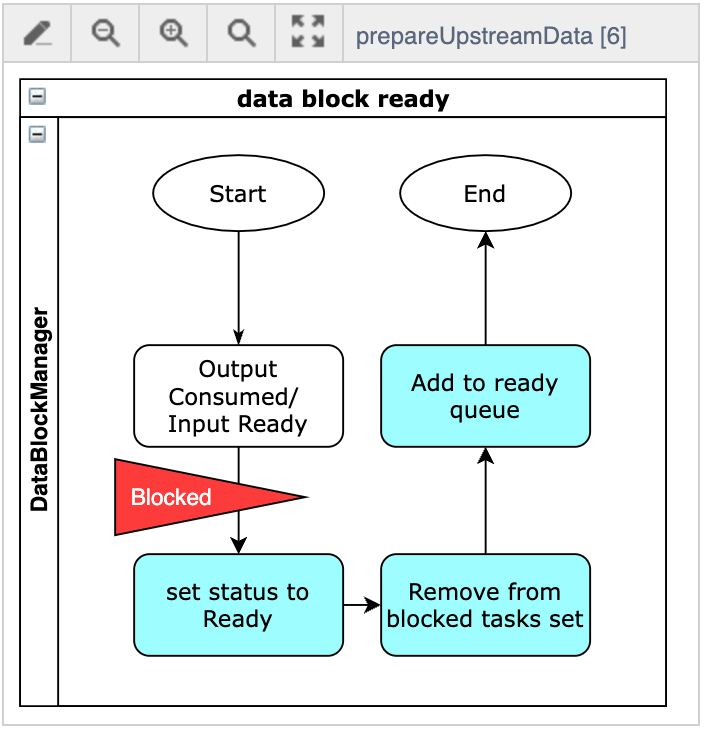
当 DriverTask 依赖的上游数据就绪时,DataBlockManager 会调用回调接口,将其状态从 Blocked 改为 Ready,并从 blockedTasks 中移除。
分配的时间片用完,会进入 ReadyQueue,并且状态从 Running 转换成 Ready。
Blocked:阻塞状态。在以下场景,DriverTask 会处于阻塞状态:
依赖的上游数据为空,需要等待上游数据时,会从 Running 状态改为 Blocked,并放入 blockedTasks。
向下游输出数据的 buffer 已满暂时无法发送数据,会从 Running 状态改为 Blocked。
Running:执行中状态。当处于 Ready 的 DriverTask 被线程调度时,从 ReadyQueue 中移除,状态变为 Running。
Finished:完成状态。DriverTask 变为完成状态后,调度模块会清理此 DriverTask 的信息。
Aborted:终止状态。在任何情况下,出现以下情况,DriverTask 会立即进入终止状态,并释放所有申请的资源。
执行超时
用户中断了查询
不可恢复的 Exception
调度模块重要组件
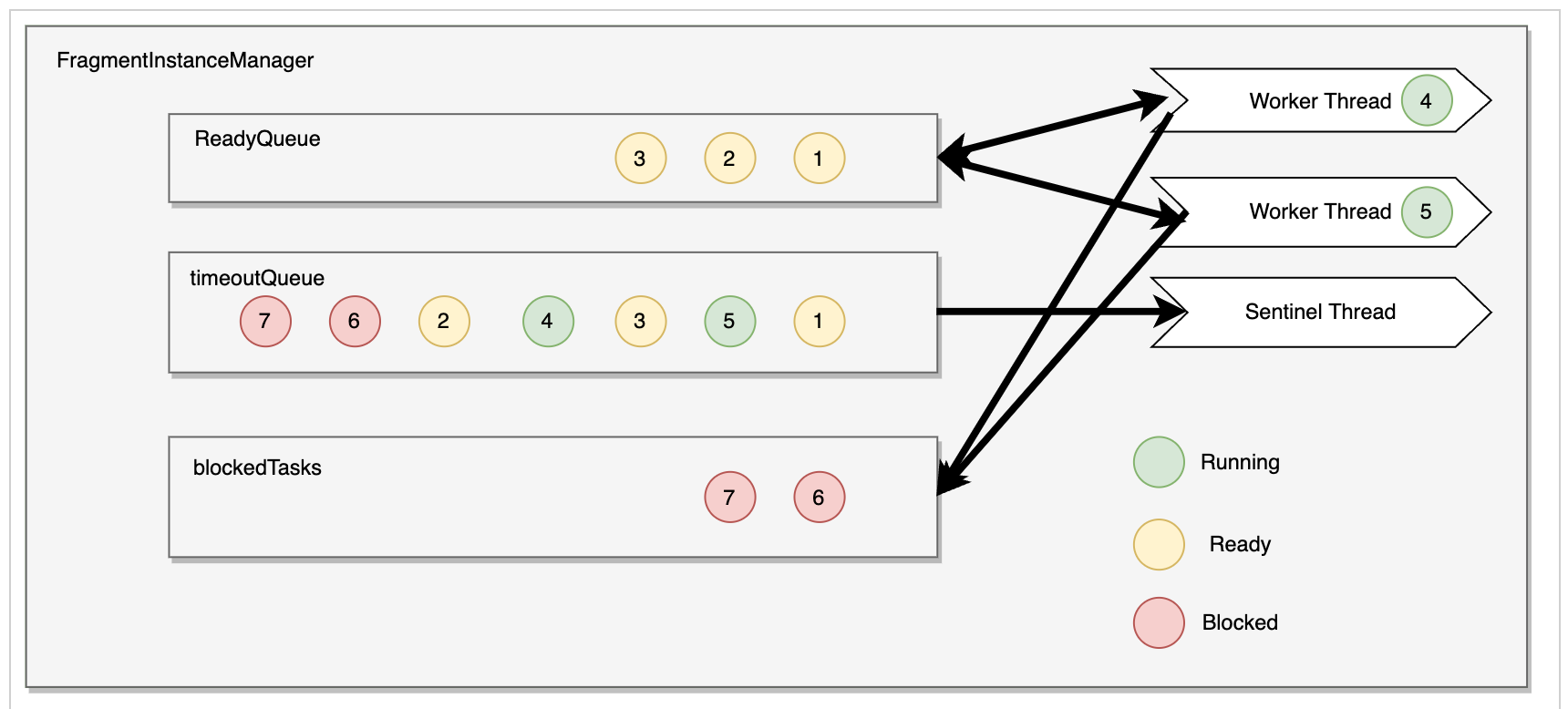
上图包含了调度模块的一些重要组件,下面对调度模块重要组件进行介绍,理解这些组件的作用可以帮助您更好地阅读源码。
Worker Thread
真正负责执行 DriverTask 的物理线程,具体实现类为 DriverSchedulerThread。数量可通过配置参数进行配置,实例启动后不可改变。
DriverSchedulerThread 的实现:
生命周期和查询引擎一致。
内部主体为无限循环,只通过 InterruptedException 中断(当服务停止时会发送 InterruptedException)。
循环会尝试去 ReadyQueue 拉取队头的 DriverTask。若队列为空,则 Worker Thread 进入阻塞状态。
Worker Thread 在执行 DriverTask 时,会调用 DriverTask.processFor(),然后返回 ListenableFuture。为了保证 Worker Thread 不会因为某个执行时间较长的 DriverTask 导致其他 DriverTask 饿死,引入了时间片机制。当 Driver#processFor 方法会接收一个时间片长度作为参数,processFor 会运行时间片长度的时间,执行时间超过时间片长度时,processFor() 方法会结束运行,然后返回一个 Future。(目前的时间片为代码内置的常量: 100ms。后续可能会考虑变成用户可配置的项。但是需要有范围值保护。过大的时间片会使得此机制失效,过小的则会频繁触发 DriverTask 的状态切换,影响执行效率。)
根据返回的 Future,会有如下操作:
若 Future 被 cancel,则终止当前 DriverTask 的执行,将其设置为 Aborted 状态。
若执行完成,则将 DriverTask 置为 Finished 状态。
若时间片用完,则将 DriverTask 置为 Ready 状态,计算并更新调度权重,将 DriverTask 加入到 ReadyQueue。
若是因阻塞导致执行权让出,则将 DriverTask 置为 Blocked 状态,并注册 Blocked → Ready 的回调逻辑。
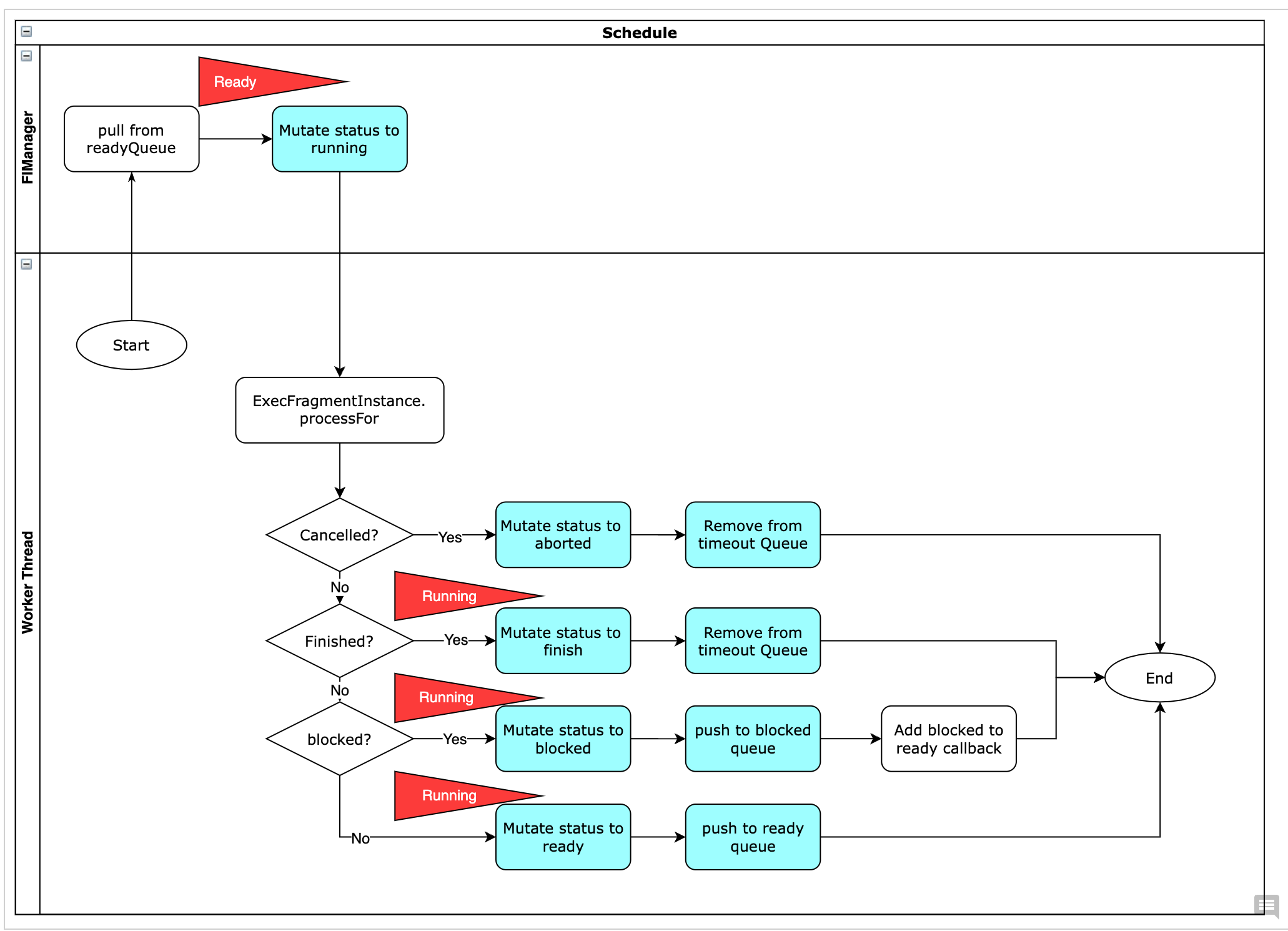
具体流程可以结合下图进行理解:
代码实现为:
public void execute(DriverTask task) throws InterruptedException {long startNanos = ticker.read();// try to switch it to RUNNINGif (!scheduler.readyToRunning(task)) {return;}IDriver driver = task.getDriver();CpuTimer timer = new CpuTimer();ListenableFuture<?> future = driver.processFor(EXECUTION_TIME_SLICE);CpuTimer.CpuDuration duration = timer.elapsedTime();// If the future is cancelled, the task is in an error and should be thrown.if (future.isCancelled()) {task.setAbortCause(DriverTaskAbortedException.BY_ALREADY_BEING_CANCELLED);scheduler.toAborted(task);return;}long quantaScheduledNanos = ticker.read() - startNanos;ExecutionContext context = new ExecutionContext();context.setCpuDuration(duration);context.setScheduledTimeInNanos(quantaScheduledNanos);context.setTimeSlice(EXECUTION_TIME_SLICE);if (driver.isFinished()) {scheduler.runningToFinished(task, context);return;}if (future.isDone()) {scheduler.runningToReady(task, context);} else {scheduler.runningToBlocked(task, context);future.addListener(() -> {try (SetThreadName driverTaskName2 =new SetThreadName(task.getDriver().getDriverTaskId().getFullId())) {scheduler.blockedToReady(task);}},listeningExecutor);}}
}Sentinel Thread
负责监控 DriverTask 超时的物理线程,全局唯一,具体实现类为 DriverTaskTimeoutSentinelThread。
DriverTaskTimeoutSentinelThread 的实现:
内部主体为无限循环,只通过 InterruptedException 中断(当服务停止时会发送 InterruptedException)。
尝试去 timeoutQueue 拉取队头的 DriverTask。若队列为空,则 Sentinel Thread 进入睡眠状态。
Sentinel 在拉取 DriverTask 时,会判断当前系统时间是否超过了超时时间:
若超时,则将状态置为 Aborted 状态,走超时处理逻辑。
若未超时,则睡眠至超时时间,将状态置为 Aborted 状态,走超时处理逻辑。
可以结合下图进行理解:

优先调度队列 ReadyQueue
目前实现参考了 Trino 的 MultilevelSplitQueue,在 IoTDB 里的实现类为 MultilevelPriorityQueue,设计思路可以参考博客 Trino 源码阅读 —— MultiLevelSplitQueue 调度机制。
该队列特点:
线程安全。
是一个阻塞队列,有最大长度限制。
存在任务降级机制,设计初衷是避免任务出现饿死,提升 CPU 利用率。
超时队列 TimeoutQueue
根据 DriverTask 的超时 deadline 排序的最大堆,超时时间越早的 DriverTask 就会被先做超时检查。
该队列长度应该有最大限制。
该队列特点:
线程安全。
按照 DriverTask 的调度权重排序,在 O(lgn) 的时间复杂度内完成队列元素的 pull 和 push。
有根据 DriverTask 的 id 做索引查询的能力,能够在 O(lgn) 的时间复杂度内完成随机元素的删除。
阻塞任务集合 BlockedTasks
处于 Blocked 状态的 DriverTask 的集合,线程安全,在 O(1) 的时间复杂度内完成元素的读取。
调度器 DriverScheduler
调度模块的核心,持有线程资源,即之前提到的 WorkerThread 和 SentinelThread。维护了 ReadyQueue 和 TimeoutQueue,FragmentInstance 可以通过 DriverScheduler 提交 Driver,DriverScheduler 负责将 Driver 封装成 DriverTask 并进一步执行。
DriverScheduler 负责切换 DriverTask 的状态,主要通过内部类 Scheduler 完成。ITaskScheduler 定义了切换 DriverTask 状态的接口,Scheduler 实现了这些接口。接口定义如下:
/** the scheduler interface of {@link DriverTask} */
public interface ITaskScheduler {/*** Switch a task from {@link DriverTaskStatus#BLOCKED} to {@link DriverTaskStatus#READY}.** @param task the task to be switched.*/void blockedToReady(DriverTask task);/*** Switch a task from {@link DriverTaskStatus#READY} to {@link DriverTaskStatus#RUNNING}.** @param task the task to be switched.* @return true if it's switched to the target status successfully, otherwise false.*/boolean readyToRunning(DriverTask task);/*** Switch a task from {@link DriverTaskStatus#RUNNING} to {@link DriverTaskStatus#READY}.** @param task the task to be switched.* @param context the execution context of last running.*/void runningToReady(DriverTask task, ExecutionContext context);/*** Switch a task from {@link DriverTaskStatus#RUNNING} to {@link DriverTaskStatus#BLOCKED}.** @param task the task to be switched.* @param context the execution context of last running.*/void runningToBlocked(DriverTask task, ExecutionContext context);/*** Switch a task from {@link DriverTaskStatus#RUNNING} to {@link DriverTaskStatus#FINISHED}.** @param task the task to be switched.* @param context the execution context of last running.*/void runningToFinished(DriverTask task, ExecutionContext context);/*** Switch a task to {@link DriverTaskStatus#ABORTED}.** @param task the task to be switched.*/void toAborted(DriverTask task);Blocked→ Ready
总体流程可以参考下图:
红色三角处表示,当获取到锁之后,还需要再次确认 DriverTask 状态是否符合预期(在排队等锁时可能被 SentinelThread 改为 Aborted 状态)。若为 Aborted 状态,则后续流程全部跳过。
代码实现为:
@Override
public void blockedToReady(DriverTask task) {task.lock();try {if (task.getStatus() != DriverTaskStatus.BLOCKED) {return;}task.setStatus(DriverTaskStatus.READY);QUERY_METRICS.recordTaskQueueTime(BLOCK_QUEUED_TIME, System.nanoTime() - task.getLastEnterBlockQueueTime());task.setLastEnterReadyQueueTime(System.nanoTime());task.resetLevelScheduledTime();readyQueue.push(task);blockedTasks.remove(task);} finally {task.unlock();}
}Running -> Ready
计算并更新调度权重,将 DriverTask 加入到 ReadyQueue。
@Override
public void runningToReady(DriverTask task, ExecutionContext context) {task.lock();try {if (task.getStatus() != DriverTaskStatus.RUNNING) {return;}task.updateSchedulePriority(context);task.setStatus(DriverTaskStatus.READY);task.setLastEnterReadyQueueTime(System.nanoTime());readyQueue.push(task);} finally {task.unlock();}
}Running -> Blocked
更新调度权重,然后将 DriverTask 加入 blockedTasks。
@Override
public void runningToBlocked(DriverTask task, ExecutionContext context) {task.lock();try {if (task.getStatus() != DriverTaskStatus.RUNNING) {return;}task.updateSchedulePriority(context);task.setStatus(DriverTaskStatus.BLOCKED);task.setLastEnterBlockQueueTime(System.nanoTime());blockedTasks.add(task);} finally {task.unlock();}
}Running -> Finished
更新调度权重,清理 DriverTask 相关信息。
@Override
public void runningToFinished(DriverTask task, ExecutionContext context) {task.lock();try {if (task.getStatus() != DriverTaskStatus.RUNNING) {return;}task.updateSchedulePriority(context);task.setStatus(DriverTaskStatus.FINISHED);clearDriverTask(task);} finally {task.unlock();}
}toAborted
由于同一个 FragmentInstance 的 DriverTask 之间有依赖性,一个 DriverTask 被置为 Aborted,其余相关的 DriverTask 也应该被置为 Aborted。
@Override
public void toAborted(DriverTask task) {try (SetThreadName driverTaskName =new SetThreadName(task.getDriver().getDriverTaskId().getFullId())) {task.lock();try {// If a task is already in an end state, it indicates that the task is finalized in other// threads.if (task.isEndState()) {return;}logger.warn("The task {} is aborted. All other tasks in the same query will be cancelled",task.getDriverTaskId());clearDriverTask(task);} finally {task.unlock();}QueryId queryId = task.getDriverTaskId().getQueryId();Map<FragmentInstanceId, Set<DriverTask>> queryRelatedTasks = queryMap.get(queryId);if (queryRelatedTasks != null) {for (Set<DriverTask> fragmentRelatedTasks : queryRelatedTasks.values()) {if (fragmentRelatedTasks != null) {for (DriverTask otherTask : fragmentRelatedTasks) {if (task.equals(otherTask)) {continue;}otherTask.lock();try {otherTask.setAbortCause(DriverTaskAbortedException.BY_QUERY_CASCADING_ABORTED);clearDriverTask(otherTask);} finally {otherTask.unlock();}}}}}}
}这篇关于Apache IoTDB 查询引擎源码阅读——DataNode 上 DriverTask 调度与执行的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




