本文主要是介绍IEEE最新!基于激光SLAM的移动机器人导航算法,实现在未知环境下的精确定位,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
作者:小柠檬 | 来源:3DCV
在公众号「3DCV」后台,回复「原论文」获取论文
添加微信:dddvision,备注:机器人导航,拉你入群。文末附行业细分群
导读
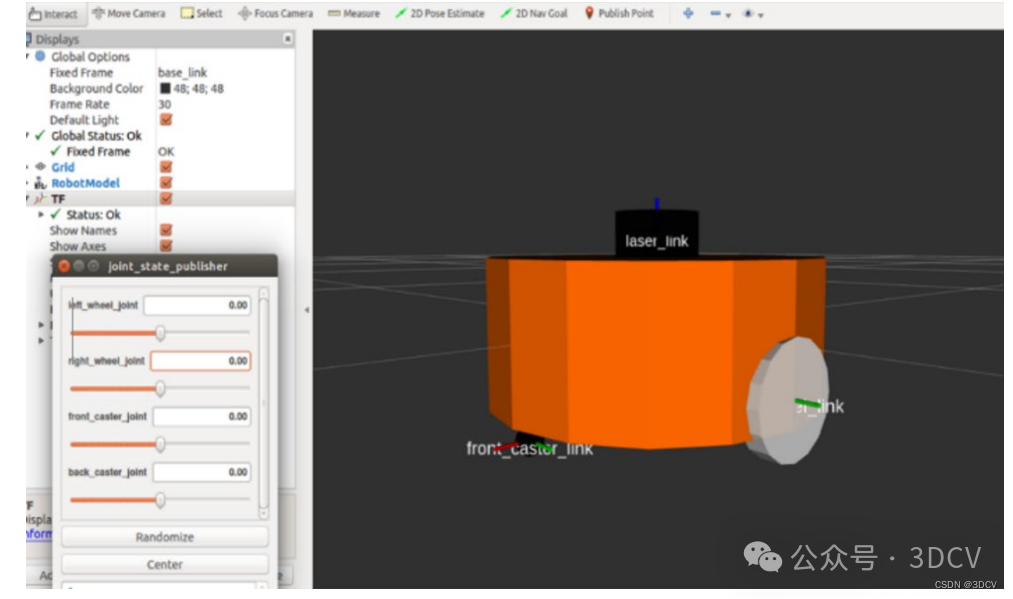
定位技术是机器人技术中的一个关键问题,包括导航控制和路径规划。传统的定位方法涉及使用全球定位系统(GPS),这在实现精确定位和导航方面提出了重大挑战。因此,非基于GPS的定位和导航方法已成为机器人领域的研究热点。该文提出一种基于激光雷达数据采集的点云信息帧匹配方法。它结合了一种改进的激光点云数据位姿估计算法,并将其与非线性优化技术相结合进行标定和优化,从而实现移动机器人在未知环境下的精确定位。利用ROS机器人操作系统构建仿真实验平台,对程序进行设计,并验证改进算法的验证。实验结果表明,改进的帧匹配算法在映射和定位效果方面表现出更好的鲁棒性和定位精度。同时,既能满足工程要求,又能基于光栅地图完成移动机器人的自主导航。
原文链接:IEEE最新!基于激光SLAM的移动机器人导航算法,实现在未知环境下的精确定位
专业!3D视觉视频课程
3D视觉工坊精品课程官网:3dcver.com
我们的3D视觉学习平台包含:相位偏折术、面结构光高阶、结构光、机械臂抓取、工业点云实战、Open3D、深度学习缺陷检测、3D缺陷检测、BEV&Occ、Transformer、模型部署、3D目标检测、单目深度估计、车载标定、规划与控制、无人机、三维视觉C++、三维视觉python、dTOF、相机标定、ROS2、机器人控制规划、LeGo-LAOM、激光-视觉-IMU-GPS融合SLAM、LOAM-SLAM、室内室外SLAM、VINS-Fusion、ORB-SLAM3、MVSNet三维重建、colmap、线面结构光、硬件结构光扫描仪。

3D视觉学习圈子
我们的3D视觉学习圈子「3D视觉从入门到精通」知识星球、国内成立时间最早、6000+成员交流学习。包括:星球专属课程近20门(价值超6000)、项目对接、3D视觉学习路线总结、最新顶会论文&代码、3D视觉行业最新模组、3D视觉源码汇总、书籍推荐、编程基础&学习工具、实战项目&作业、求职招聘&面经&面试题等等。国内超一流3D视觉学习圈子!欢迎您扫码加入我们的学习圈子知识星球。

重磅!3D视觉交流群
大家好,群里会第一时间发布3D计算机视觉方向的最前沿论文解读和交流分享,主要方向有:
视觉SLAM、激光SLAM、语义SLAM、NeRF-SLAM、路径规划、相机标定、立体匹配、三维点云、结构光、机械臂抓取、缺陷检测、6D位姿估计、相位偏折术、Halcon、阵列相机、光度立体视觉、NeRF、多视图几何、OpenMVS、MVSNet、colmap、纹理贴图、深度估计、Transformer、多传感器标定、多传感器融合、3D目标检测、路径规划、轨迹预测、3D点云分割、模型部署、车道线检测、BEV感知、Occupancy、目标跟踪、四旋翼建模、无人机飞控、求职、硬件选型、视觉产品落地、最新论文、3D视觉最新产群。
添加微信: dddvision,备注:研究方向+学校/公司+昵称(如3D点云+清华+小草莓), 拉你入群。

移步公众号「3DCV」第一时间获取工业3D视觉、自动驾驶、SLAM、三维重建、最新最前沿论文和科技动态。
这篇关于IEEE最新!基于激光SLAM的移动机器人导航算法,实现在未知环境下的精确定位的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






