本文主要是介绍Qt下使用modbus-c库实现PLC线圈/保持寄存器的读写,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
系列文章目录
提示:这里是该系列文章的所有文章的目录
第一章:Qt下使用ModbusTcp通信协议进行PLC线圈/保持寄存器的读写(32位有符号数)
第二章:Qt下使用modbus-c库实现PLC线圈/保持寄存器的读写
文章目录
- 系列文章目录
- 前言
- 一、下载modbus-c库
- 二、实现ModbusLib类
- 三、使用ModbusLib类
- 四、下载链接
- 总结
前言
在上一篇文章中提到了使用Qt下的Modbus模块来进行ModbusTcp的通信,采用QModbusTcpClient类作为Modbus客户端(主站)与PLC读写,正常情况下是可以满足读写需求的,但是使用过程中发现读写频率较高时会出现写入延迟等问题,后面发现使用这个C语言写的第三方Modbus库来与PLC通信会更加稳定,性能更优越,这里将结合相应的示例进行讲解,以便大家学习,如有错误之处,欢迎大家批评指正。
项目效果
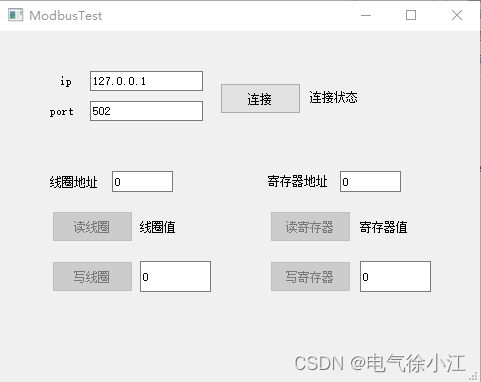
提示:以下是本篇文章正文内容,下面案例可供参考
一、下载modbus-c库
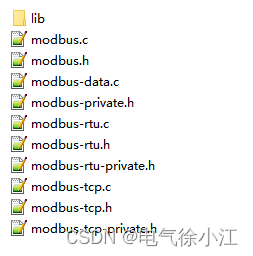
通过参考博客中的下载链接到官网下载:https://sourceforge.net/projects/libmodbus/(似乎失效了,下载不了),或者通过下文中我的百度网盘链接下载压缩包,文件内容如下,其中包含相关源码和ws2_32.dll(在lib中,依赖该动态库)
二、实现ModbusLib类
这里我实现了自己的ModbusLib类的封装,使用了pri子模块的方式,也是方便日后进行此模块的复用
这里我使用的是tcp的方式来通信,pri内容如下:
ModbusLib.pri
HEADERS += \$$PWD/modbus.h \$$PWD/modbus-private.h \#$$PWD/modbus-rtu.h \#$$PWD/modbus-rtu-private.h \$$PWD/modbus-tcp.h \$$PWD/modbus-tcp-private.h \$$PWD/mymodbuslib.hSOURCES += \$$PWD/modbus.c \$$PWD/modbus-data.c \#$$PWD/modbus-rtu.c \$$PWD/modbus-tcp.c \$$PWD/mymodbuslib.cppLIBS += -L$$PWD/lib/ -lws2_32
这里会看到将modbus-c库的源码加入到工程中,所以添加好相关的头文件就可以调用库函数了,这里相关函数的使用见下文代码:
1.mymodbusLib.h
#ifndef MYMODBUSLIB_H
#define MYMODBUSLIB_H#include <QObject>
#include <QDateTime>
#include <QTimer>
#include <QThread>
#include <QEventLoop>
#include <QCoreApplication>
#include <QDebug>
#include "modbus.h"
#include "modbus-private.h"
#include "modbus-tcp.h"
#include "modbus-tcp-private.h"#define LOGDEBUG qDebug()<<QTime::currentTime().toString("[hh:mm:ss:zzz]")class MyModbusLib : public QObject
{Q_OBJECTpublic:explicit MyModbusLib(QObject *parent = nullptr);~MyModbusLib();bool initConnect(QString tcpIP,int tcpPort);bool readCoil(int readAdd);void writeCoil(int writeAdd,int writeNum);int readRegister(int writeAdd);void writeRegister32(int writeAdd,int writeNum);private:modbus_t *m_modbus;
};#endif // MYMODBUSLIB_H
2.mymodbusLib.cpp
#include "mymodbuslib.h"MyModbusLib::MyModbusLib(QObject *parent) : QObject(parent)
{}MyModbusLib::~MyModbusLib()
{modbus_close(m_modbus);modbus_free(m_modbus);
}//初始化
bool MyModbusLib::initConnect(QString tcpIP,int tcpPort)
{m_modbus = modbus_new_tcp(tcpIP.toLatin1().data(),tcpPort);modbus_set_slave(m_modbus,1);if(modbus_connect(m_modbus) == -1){return false;}//设置modbus超时时间为1000毫秒struct timeval t;t.tv_sec = 0;t.tv_usec = 1000000;modbus_set_response_timeout(m_modbus,t.tv_sec,t.tv_usec);return true;
}bool MyModbusLib::readCoil(int readAdd)
{uint8_t bitsr[1]={0};int rNum = modbus_read_bits(m_modbus,readAdd,1,bitsr);if(rNum == -1){LOGDEBUG<<"读取线圈"<<readAdd<<"失败!";return false;}else{//LOGDEBUG<<"读取线圈"<<readAdd<<"成功!";if(bitsr[0] == 1){return true;}}return false;
}void MyModbusLib::writeCoil(int writeAdd,int writeNum)
{uint8_t bitsw[1]={0};bitsw[0] = writeNum;int rNum = modbus_write_bits(m_modbus,writeAdd,1,bitsw);if(rNum == -1){LOGDEBUG<<"线圈"<<writeAdd<<"写入"<<writeNum<<"失败!";}else{LOGDEBUG<<"线圈"<<writeAdd<<"写入"<<writeNum<<"成功!";}
}int MyModbusLib::readRegister(int readAdd)
{uint16_t regsr[2]={0};int rNum = modbus_read_registers(m_modbus,readAdd,2,regsr);if(rNum == -1){LOGDEBUG<<"读取寄存器"<<readAdd<<"失败!";}else{//LOGDEBUG<<"读取寄存器"<<readAdd<<"成功!";int readNum = regsr[0] | (regsr[1] << 16);return readNum;}return 0;
}void MyModbusLib::writeRegister32(int writeAdd,int writeNum)
{uint16_t regsw[2]={0};regsw[0] = writeNum & 0xffff;regsw[1] = (writeNum >> 16) & 0xffff;int rNum = modbus_write_registers(m_modbus,writeAdd,2,regsw);if(rNum == -1){LOGDEBUG<<"寄存器"<<writeAdd<<"写入"<<writeNum<<"失败!";}else{LOGDEBUG<<"寄存器"<<writeAdd<<"写入"<<writeNum<<"成功!";}
}
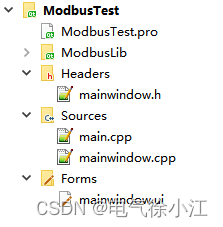
三、使用ModbusLib类
工程结构如图,下面可以直接在主界面使用封装好的ModbusLib类,详细内容见代码:
1.ModbusTest.pro
QT += core guigreaterThan(QT_MAJOR_VERSION, 4): QT += widgetsCONFIG += c++11DEFINES += QT_DEPRECATED_WARNINGS#设置字符
contains( CONFIG,"msvc" ):QMAKE_CXXFLAGS += /source-charset:utf-8 /execution-charset:utf-8
contains( CONFIG,"msvc" ):QMAKE_CFLAGS +=/source-charset:utf-8 /execution-charset:utf-8#包含子模块
include (./ModbusLib/ModbusLib.pri) #libmodbus库SOURCES += \main.cpp \mainwindow.cppHEADERS += \mainwindow.hFORMS += \mainwindow.ui# Default rules for deployment.
qnx: target.path = /tmp/$${TARGET}/bin
else: unix:!android: target.path = /opt/$${TARGET}/bin
!isEmpty(target.path): INSTALLS += target
2.mainwindow.h
#ifndef MAINWINDOW_H
#define MAINWINDOW_H#include <QMainWindow>
#include <QTime>
#include <QDebug>
#include "ModbusLib/mymodbuslib.h"QT_BEGIN_NAMESPACE
namespace Ui { class MainWindow; }
QT_END_NAMESPACEclass MainWindow : public QMainWindow
{Q_OBJECTpublic:MainWindow(QWidget *parent = nullptr);~MainWindow();void initWidget();private slots:void on_pb_connect_clicked();void on_pb_readC_clicked();void on_pb_writeC_clicked();void on_pb_readH_clicked();void on_pb_writeH_clicked();private:Ui::MainWindow *ui;MyModbusLib *m_myModbus;};
#endif // MAINWINDOW_H
3.mainwindow.cpp
#include "mainwindow.h"
#include "ui_mainwindow.h"MainWindow::MainWindow(QWidget *parent): QMainWindow(parent), ui(new Ui::MainWindow)
{ui->setupUi(this);this->initWidget();
}MainWindow::~MainWindow()
{delete ui;
}void MainWindow::initWidget()
{//使能按钮ui->pb_readC->setEnabled(false);ui->pb_writeC->setEnabled(false);ui->pb_readH->setEnabled(false);ui->pb_writeH->setEnabled(false);//创建modbus对象m_myModbus = new MyModbusLib();
}void MainWindow::on_pb_connect_clicked()
{QString tcpIP = ui->le_ip->text();int tcpPort = ui->le_port->text().toInt();if(m_myModbus->initConnect(tcpIP,tcpPort)){ui->lb_state->setText("连接成功");LOGDEBUG<<"ModbusTCP连接成功!";//使能按钮ui->pb_readC->setEnabled(true);ui->pb_writeC->setEnabled(true);ui->pb_readH->setEnabled(true);ui->pb_writeH->setEnabled(true);}else{ui->lb_state->setText("连接失败");LOGDEBUG<<"ModbusTCP连接失败!";}
}void MainWindow::on_pb_readC_clicked()
{int readAdd = ui->le_addC->text().toInt();ui->lb_numC->setText(QString::number(m_myModbus->readCoil(readAdd)));
}void MainWindow::on_pb_writeC_clicked()
{int writeAdd = ui->le_addC->text().toInt();int writeNum = ui->le_writeNumC->text().toInt();m_myModbus->writeCoil(writeAdd,writeNum);
}void MainWindow::on_pb_readH_clicked()
{int readAdd = ui->le_addH->text().toInt();ui->lb_numH->setText(QString::number(m_myModbus->readRegister(readAdd)));
}void MainWindow::on_pb_writeH_clicked()
{int writeAdd = ui->le_addH->text().toInt();int writeNum = ui->le_writeNumH->text().toInt();m_myModbus->writeRegister32(writeAdd,writeNum);
}
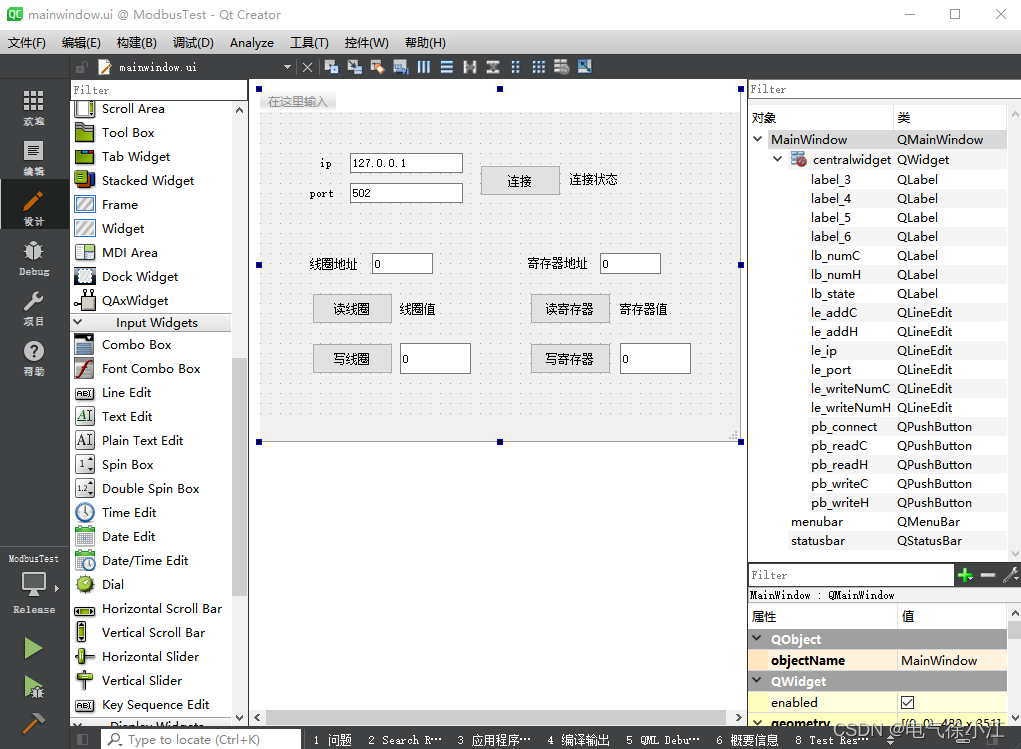
4.mainwindow.ui
四、下载链接
modbus-c库下载链接:https://pan.baidu.com/s/1rBQzOhwPIrRxL_f2CofJxQ
提取码:xxcj
总结
后续在使用modbus-c库的测试中,发现读写的效率是比Qt自带的modbus模块要高并且稳定的,建议在需要与PLC进行tcp通信时使用这种方式。这里我的ModbusLib类封装在一个文件夹内,要调用直接在工程pro中添加pri子模块就可以使用,比较方便。
hello:
共同学习,共同进步,如果还有相关问题,可在评论区留言进行讨论。
参考博客:QT 使用第三方C库实现Modbus通讯
这篇关于Qt下使用modbus-c库实现PLC线圈/保持寄存器的读写的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



