本文主要是介绍Pytorch实战2:ResNet-18实现Cifar-10图像分类(测试集分类准确率95.170%),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
版权说明:此文章为本人原创内容,转载请注明出处,谢谢合作!
Pytorch实战2:ResNet-18实现Cifar-10图像分类
实验环境:
- Pytorch 0.4.0
- torchvision 0.2.1
- Python 3.6
- CUDA8+cuDNN v7 (可选)
- Win10+Pycharm
整个项目代码:点击这里
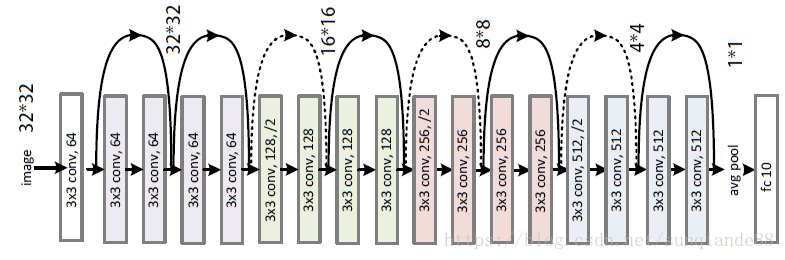
ResNet-18网络结构:
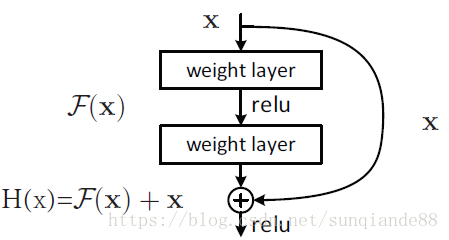
ResNet全名Residual Network残差网络。Kaiming He 的《Deep Residual Learning for Image Recognition》获得了CVPR最佳论文。他提出的深度残差网络在2015年可以说是洗刷了图像方面的各大比赛,以绝对优势取得了多个比赛的冠军。而且它在保证网络精度的前提下,将网络的深度达到了152层,后来又进一步加到1000的深度。论文的开篇先是说明了深度网络的好处:特征等级随着网络的加深而变高,网络的表达能力也会大大提高。因此论文中提出了一个问题:是否可以通过叠加网络层数来获得一个更好的网络呢?作者经过实验发现,单纯的把网络叠起来的深层网络的效果反而不如合适层数的较浅的网络效果。因此何恺明等人在普通平原网络的基础上增加了一个shortcut, 构成一个residual block。此时拟合目标就变为F(x),F(x)就是残差:
Pytorch上搭建ResNet-18:
'''ResNet-18 Image classfication for cifar-10 with PyTorch Author 'Sun-qian'.'''
import torch
import torch.nn as nn
import torch.nn.functional as Fclass ResidualBlock(nn.Module):def __init__(self, inchannel, outchannel, stride=1):super(ResidualBlock, self).__init__()self.left = nn.Sequential(nn.Conv2d(inchannel, outchannel, kernel_size=3, stride=stride, padding=1, bias=False),nn.BatchNorm2d(outchannel),nn.ReLU(inplace=True),nn.Conv2d(outchannel, outchannel, kernel_size=3, stride=1, padding=1, bias=False),nn.BatchNorm2d(outchannel))self.shortcut = nn.Sequential()if stride != 1 or inchannel != outchannel:self.shortcut = nn.Sequential(nn.Conv2d(inchannel, outchannel, kernel_size=1, stride=stride, bias=False),nn.BatchNorm2d(outchannel))def forward(self, x):out = self.left(x)out += self.shortcut(x)out = F.relu(out)return outclass ResNet(nn.Module):def __init__(self, ResidualBlock, num_classes=10):super(ResNet, self).__init__()self.inchannel = 64self.conv1 = nn.Sequential(nn.Conv2d(3, 64, kernel_size=3, stride=1, padding=1, bias=False),nn.BatchNorm2d(64),nn.ReLU(),)self.layer1 = self.make_layer(ResidualBlock, 64, 2, stride=1)self.layer2 = self.make_layer(ResidualBlock, 128, 2, stride=2)self.layer3 = self.make_layer(ResidualBlock, 256, 2, stride=2)self.layer4 = self.make_layer(ResidualBlock, 512, 2, stride=2)self.fc = nn.Linear(512, num_classes)def make_layer(self, block, channels, num_blocks, stride):strides = [stride] + [1] * (num_blocks - 1) #strides=[1,1]layers = []for stride in strides:layers.append(block(self.inchannel, channels, stride))self.inchannel = channelsreturn nn.Sequential(*layers)def forward(self, x):out = self.conv1(x)out = self.layer1(out)out = self.layer2(out)out = self.layer3(out)out = self.layer4(out)out = F.avg_pool2d(out, 4)out = out.view(out.size(0), -1)out = self.fc(out)return outdef ResNet18():return ResNet(ResidualBlock)
Pytorch上训练:
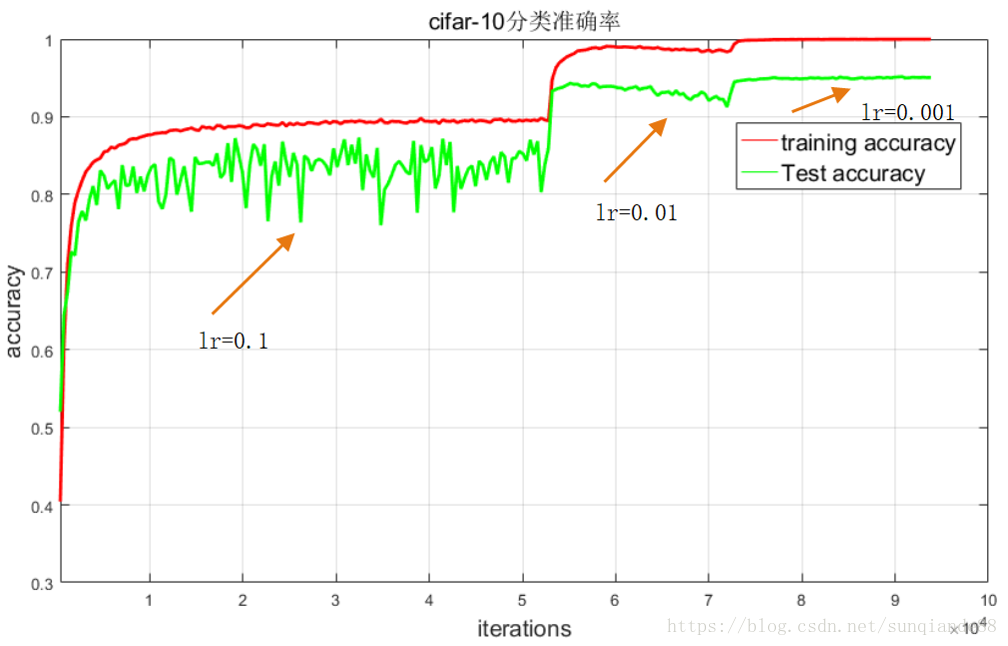
所选数据集为Cifar-10,该数据集共有60000张带标签的彩色图像,这些图像尺寸32*32,分为10个类,每类6000张图。这里面有50000张用于训练,每个类5000张,另外10000用于测试,每个类1000张。训练时人为修改学习率,当epoch:[1-135] ,lr=0.1;epoch:[136-185], lr=0.01;epoch:[186-240] ,lr=0.001。训练代码如下:
import torch
import torch.nn as nn
import torch.optim as optim
import torchvision
import torchvision.transforms as transforms
import argparse
from resnet import ResNet18
import os# 定义是否使用GPU
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")# 参数设置,使得我们能够手动输入命令行参数,就是让风格变得和Linux命令行差不多
parser = argparse.ArgumentParser(description='PyTorch CIFAR10 Training')
parser.add_argument('--outf', default='./model/', help='folder to output images and model checkpoints') #输出结果保存路径
args = parser.parse_args()# 超参数设置
EPOCH = 135 #遍历数据集次数
pre_epoch = 0 # 定义已经遍历数据集的次数
BATCH_SIZE = 128 #批处理尺寸(batch_size)
LR = 0.01 #学习率# 准备数据集并预处理
transform_train = transforms.Compose([transforms.RandomCrop(32, padding=4), #先四周填充0,在吧图像随机裁剪成32*32transforms.RandomHorizontalFlip(), #图像一半的概率翻转,一半的概率不翻转transforms.ToTensor(),transforms.Normalize((0.4914, 0.4822, 0.4465), (0.2023, 0.1994, 0.2010)), #R,G,B每层的归一化用到的均值和方差
])transform_test = transforms.Compose([transforms.ToTensor(),transforms.Normalize((0.4914, 0.4822, 0.4465), (0.2023, 0.1994, 0.2010)),
])trainset = torchvision.datasets.CIFAR10(root='./data', train=True, download=True, transform=transform_train) #训练数据集
trainloader = torch.utils.data.DataLoader(trainset, batch_size=BATCH_SIZE, shuffle=True, num_workers=2) #生成一个个batch进行批训练,组成batch的时候顺序打乱取testset = torchvision.datasets.CIFAR10(root='./data', train=False, download=True, transform=transform_test)
testloader = torch.utils.data.DataLoader(testset, batch_size=100, shuffle=False, num_workers=2)
# Cifar-10的标签
classes = ('plane', 'car', 'bird', 'cat', 'deer', 'dog', 'frog', 'horse', 'ship', 'truck')# 模型定义-ResNet
net = ResNet18().to(device)# 定义损失函数和优化方式
criterion = nn.CrossEntropyLoss() #损失函数为交叉熵,多用于多分类问题
optimizer = optim.SGD(net.parameters(), lr=LR, momentum=0.9, weight_decay=5e-4) #优化方式为mini-batch momentum-SGD,并采用L2正则化(权重衰减)# 训练
if __name__ == "__main__":if not os.path.exists(args.outf):os.makedirs(args.outf)best_acc = 85 #2 初始化best test accuracyprint("Start Training, Resnet-18!") # 定义遍历数据集的次数with open("acc.txt", "w") as f:with open("log.txt", "w")as f2:for epoch in range(pre_epoch, EPOCH):print('\nEpoch: %d' % (epoch + 1))net.train()sum_loss = 0.0correct = 0.0total = 0.0for i, data in enumerate(trainloader, 0):# 准备数据length = len(trainloader)inputs, labels = datainputs, labels = inputs.to(device), labels.to(device)optimizer.zero_grad()# forward + backwardoutputs = net(inputs)loss = criterion(outputs, labels)loss.backward()optimizer.step()# 每训练1个batch打印一次loss和准确率sum_loss += loss.item()_, predicted = torch.max(outputs.data, 1)total += labels.size(0)correct += predicted.eq(labels.data).cpu().sum()print('[epoch:%d, iter:%d] Loss: %.03f | Acc: %.3f%% '% (epoch + 1, (i + 1 + epoch * length), sum_loss / (i + 1), 100. * correct / total))f2.write('%03d %05d |Loss: %.03f | Acc: %.3f%% '% (epoch + 1, (i + 1 + epoch * length), sum_loss / (i + 1), 100. * correct / total))f2.write('\n')f2.flush()# 每训练完一个epoch测试一下准确率print("Waiting Test!")with torch.no_grad():correct = 0total = 0for data in testloader:net.eval()images, labels = dataimages, labels = images.to(device), labels.to(device)outputs = net(images)# 取得分最高的那个类 (outputs.data的索引号)_, predicted = torch.max(outputs.data, 1)total += labels.size(0)correct += (predicted == labels).sum()print('测试分类准确率为:%.3f%%' % (100 * correct / total))acc = 100. * correct / total# 将每次测试结果实时写入acc.txt文件中print('Saving model......')torch.save(net.state_dict(), '%s/net_%03d.pth' % (args.outf, epoch + 1))f.write("EPOCH=%03d,Accuracy= %.3f%%" % (epoch + 1, acc))f.write('\n')f.flush()# 记录最佳测试分类准确率并写入best_acc.txt文件中if acc > best_acc:f3 = open("best_acc.txt", "w")f3.write("EPOCH=%d,best_acc= %.3f%%" % (epoch + 1, acc))f3.close()best_acc = accprint("Training Finished, TotalEPOCH=%d" % EPOCH)实验结果:best_acc= 95.170%
(损失图是matlab画的,用保存下来的txt日志)
这篇关于Pytorch实战2:ResNet-18实现Cifar-10图像分类(测试集分类准确率95.170%)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






