本文主要是介绍无人驾驶控制算法LQR和MPC的仿真实现,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1. LQR控制器
1.1 问题陈述
考虑一个质量为 m m m 的滑块在光滑的一维地面上运动。初始时,滑块的位置和速度均为 0 0 0。我们的目标是设计一个控制器,基于传感器测得的滑块位置 x x x,为滑块提供外力 u u u,使其能够跟随参考点 x r x_r xr 运动。
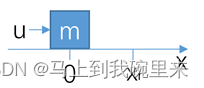
为建立动力学模型,我们采用以下微分方程:
x ¨ = u m \ddot x = \frac{u}{m} x¨=mu
定义状态向量 x = [ x 1 x 2 ] = [ x x ˙ ] x= \begin{bmatrix} x_1 \\ x_2 \end{bmatrix} =\begin{bmatrix} x \\\dot x \end{bmatrix} x=[x1x2]=[xx˙],其中 x 1 x_1 x1 表示位移, x 2 x_2 x2 表示速度。系统的状态方程为:
x ˙ = A x + B u \dot x= Ax+Bu x˙=Ax+Bu
其中:
A = [ 0 1 0 0 ] , B = [ 0 1 m ] A=\begin{bmatrix} 0 & 1 \\ 0 & 0 \end{bmatrix}, \quad B=\begin{bmatrix} 0 \\ \frac{1}{m} \end{bmatrix} A=[0010],B=[0m1]
系统的开环矩阵 A A A 决定了系统是否稳定。若没有控制器,物块在光滑地面上将无法自行停止。
1.2 控制器设计
引入控制器,我们考虑以下形式:
u = − k x = − [ k 1 , k 2 , ⋯ ] [ x 1 x 2 ⋮ ] u=-kx=-\begin{bmatrix} k_1,k_2,\cdots \end{bmatrix}\begin{bmatrix} x_1 \\ x_2 \\ \vdots \end{bmatrix} u=−kx=−[k1,k2,⋯] x1x2⋮
从而得到新的闭环矩阵:
x ˙ = ( A − B k ) x = A c l x \dot x = (A-Bk)x = A_{cl}x x˙=(A−Bk)x=Aclx
通过选择 k k k,我们可以改变 A c l A_{cl} Acl 的特征值,从而控制系统的行为。因此,关键问题是如何选择最优的 k k k。
1.3 LQR控制器
引入线性二次调节器(LQR)的思想,我们定义代价函数:
J = ∫ 0 ∞ ( x T Q x + u T R u ) d t J= \int_0^\infty{(x^TQx+u^TRu)}dt J=∫0∞(xTQx+uTRu)dt
其中 Q Q Q 和 R R R 是权重矩阵。通过调整权重,LQR 在保持系统稳定性的同时,寻找使代价函数最小化的控制策略。
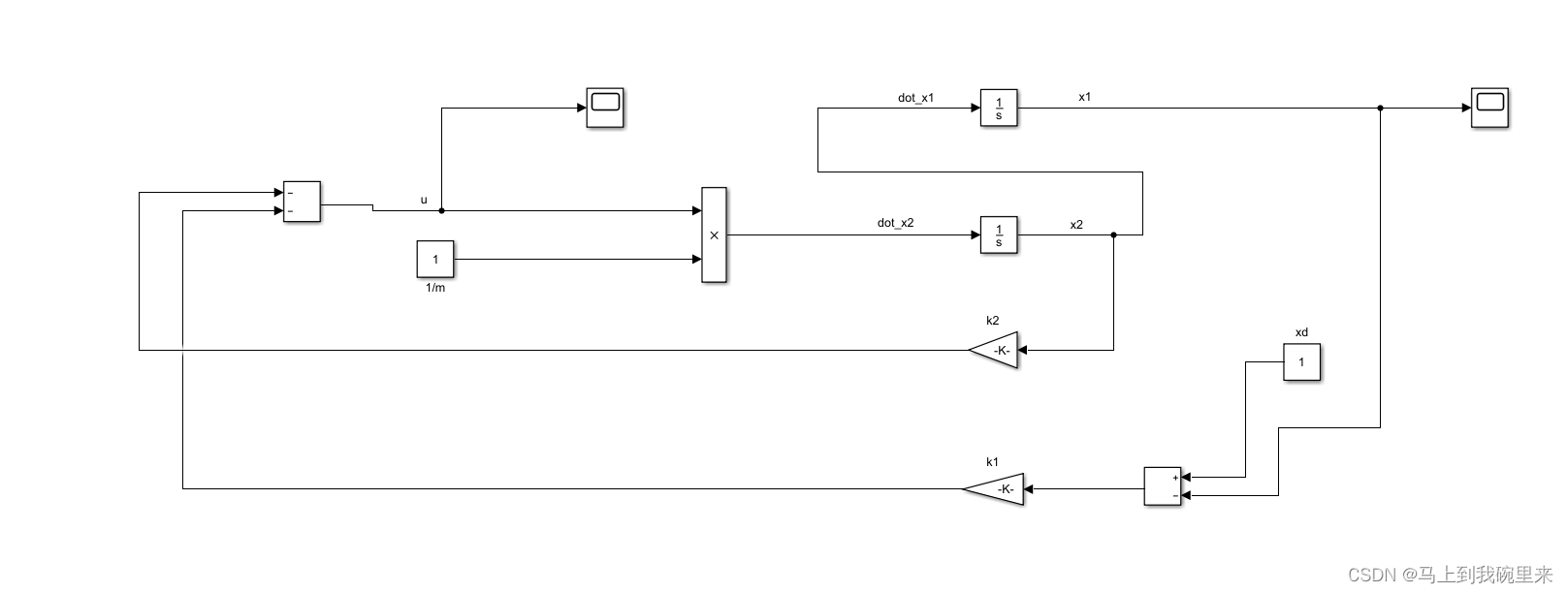
1.4 仿真建模
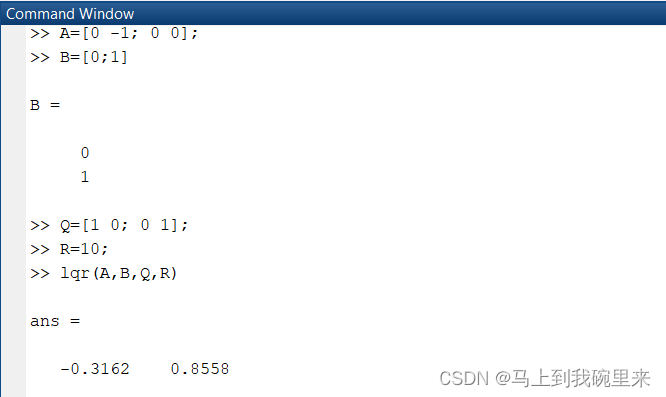
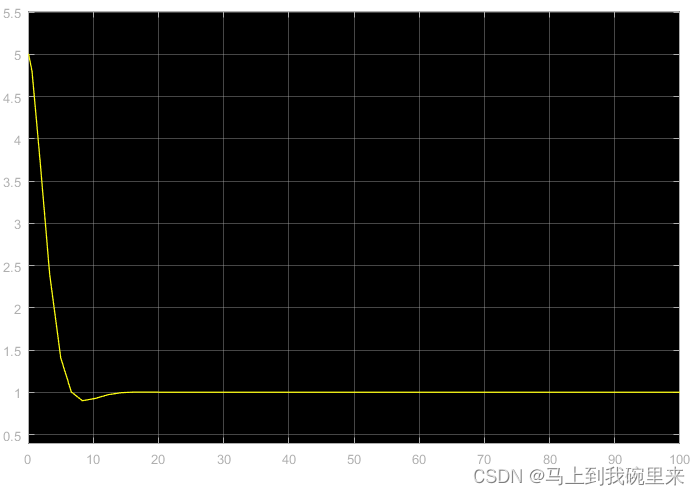
进行简单的仿真建模,通过设定初始值和目标值,LQR 控制系统能够有效地使小物块按照预设轨迹运动。
我们将初始值设在5,目标值设在1,最后得到
2. MPC控制器
2.1 模型的离散化
考虑同样的控制对象 x ˙ = A x + B u \dot x= Ax+Bu x˙=Ax+Bu,使用前向欧拉法将状态方程离散化:
x ( k + 1 ) = A ˉ x ( k ) + B ˉ u ( k ) x(k+1) =\bar Ax(k) + \bar B u(k) x(k+1)=Aˉx(k)+Bˉu(k)
其中
A ˉ = [ 1 T 0 1 ] , B ˉ = [ 0 T m ] \bar A=\begin{bmatrix} 1 & T \\ 0 & 1 \end{bmatrix},\quad \bar B=\begin{bmatrix} 0 \\ \frac{T}{m} \end{bmatrix} Aˉ=[10T1],Bˉ=[0mT]
这里的 T T T 是控制周期。
2.2 预测
MPC 的特点之一是需要对未来系统状态进行预测。在 k k k 时刻,我们预测未来 p p p 个控制周期内的系统状态,并定义预测时域内的控制量:
X k = [ x ( k + 1 ∣ k ) T x ( k + 2 ∣ k ) T ⋯ x ( k + p ∣ k ) T ] T X_k= \begin{bmatrix} x(k+1|k)^T & x(k+2|k)^T &\cdots& x(k+p|k)^T \end{bmatrix}^T Xk=[x(k+1∣k)Tx(k+2∣k)T⋯x(k+p∣k)T]T
2.3 优化
我们希望找到最佳的控制量 U k U_k Uk,使预测时域内的状态向量与参考值越接近越好。这导致一个开环最优控制问题,其数学描述为:
min J ( U k ) = U k T ( Θ T Q Θ + W ) U k + 2 ( E T Q Θ ) U k + E T Q E \min J(U_k) = U_k^T (\Theta^T Q \Theta + W) U_k +2(E^TQ\Theta) U_k +E^TQE minJ(Uk)=UkT(ΘTQΘ+W)Uk+2(ETQΘ)Uk+ETQE
其中, Θ \Theta Θ 和 E E E 分别为预测模型和误差。

2.4 仿真
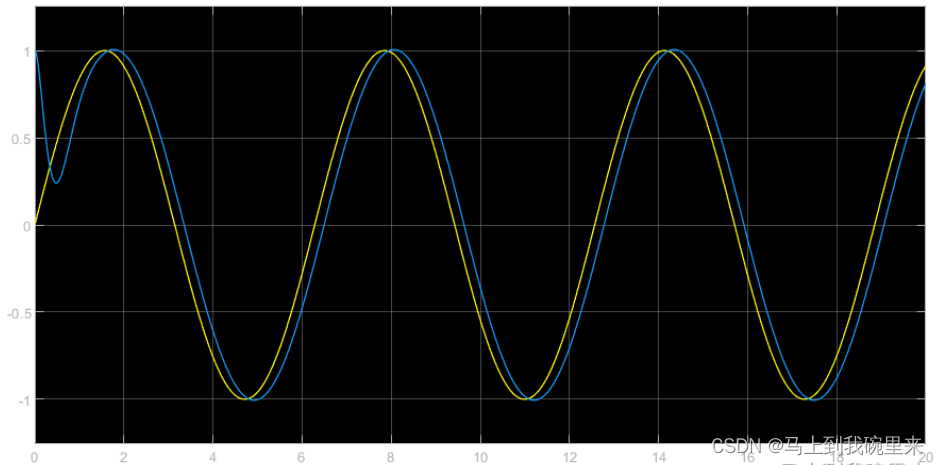
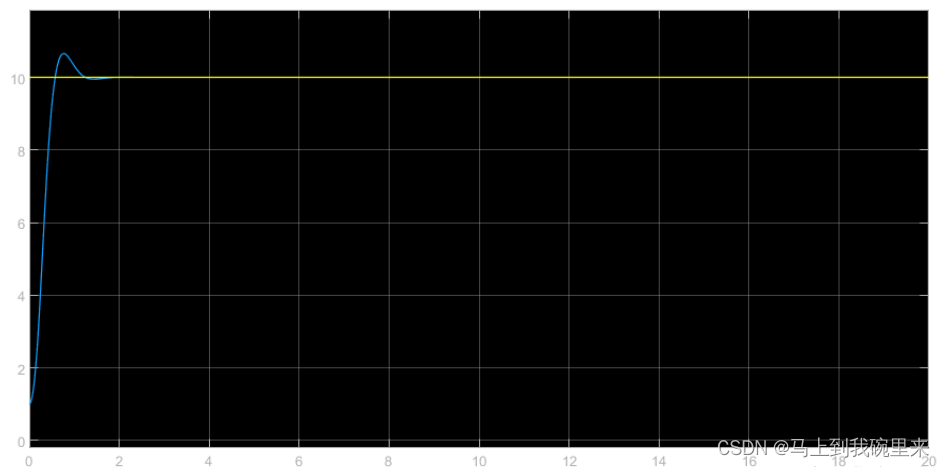
对动力学方程进行拉普拉斯变换,得到传递函数 G ( s ) = 1 m s 2 G(s)=\frac{1}{ms^2} G(s)=ms21。通过仿真,可以验证 MPC 控制系统在固定值和正弦波输入情况下能够有效跟踪目标。
s 2 X ( s ) = 1 m F ( s ) s^2X(s)=\frac{1}{m}F(s) s2X(s)=m1F(s)
得到传递函数为:
G ( s ) = X ( s ) F ( s ) = 1 m s 2 G(s)=\frac{X(s)}{F(s)}=\frac{1}{ms^2} G(s)=F(s)X(s)=ms21
建立仿真:
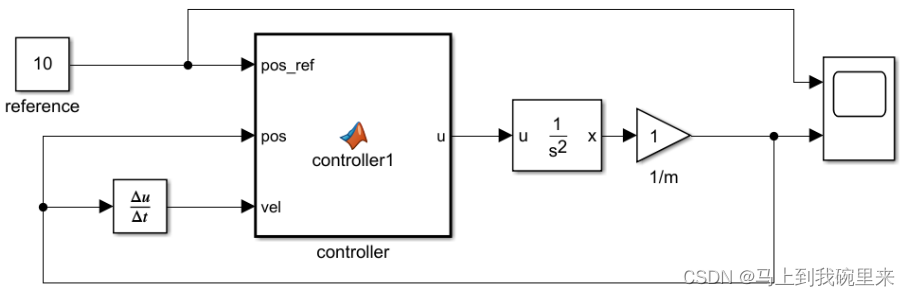
我们得到在固定值和sinwave的情况下基本都可以跟踪的比较好(参数还可继续优化)
其中MPC代码为:
function u = Controller(pos_ref, pos, vel)
%参数设置
m = 1.05; %滑块质量,增加了5%作为建模误差
T = 0.01; %控制周期10ms
p = 40; %控制时域(预测时域)
Q = 10*eye(2*p); %累计误差权重
W = 0.0001*eye(p); %控制输出权重
umax = 100; %控制量限制,即最大的力
Rk = zeros(2*p,1); %参考值序列
Rk(1:2:end) = pos_ref;
Rk(2:2:end) = vel; %参考速度跟随实际速度
%构建中间变量
xk = [pos;vel]; %xk
A_ = [1 T;0 1]; %离散化预测模型参数A
B_ = [0;T/m]; %离散化预测模型参数B
psi = zeros(2*p,2); %psi
for i=1:1:ppsi(i*2-1:i*2,1:2)=A_^i;
end
theta = zeros(2*p,p); %theta
for i=1:1:pfor j=1:1:itheta(i*2-1:i*2,j)=A_^(i-j)*B_;end
end
E = psi*xk-Rk; %E
H = 2*(theta'*Q*theta+W); %H
f = (2*E'*Q*theta)'; %f
%优化求解
coder.extrinsic('quadprog');
Uk=quadprog(H,f,[],[],[],[],-umax,umax);
%返回控制量序列第一个值
u = 0.0; %显示指定u的类型
u = Uk(1);
以上是一个简单的物理系统的 LQR 和 MPC 控制系统的设计和仿真。
这篇关于无人驾驶控制算法LQR和MPC的仿真实现的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






