本文主要是介绍将激光点云数据投影到二维图像及对三维点云上色,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
最近在做一些毕设的东西,做到这里写个笔记记录以下,也为大家提供一点参考。
本次所用的数据是16线的激光点云数据和1080p的usb图像信息,内容涉及到标定,投影两个部分,参考网上大部分都是ros下方进行进一步开发,这里写一个不一样的。
1、相机和激光雷达标定
相机和激光雷达标定使用的是autoware的标定包。需要标定的话可以参考大佬们的博客,内容相差不大,里面有工具安装步骤和标定方法。
https://blog.csdn.net/AdamShan/article/details/81670732
https://blog.csdn.net/zbr794866300/article/details/107109186
2、矩阵参数转置
autoware构建出来的矩阵不能拿来直接使用,原因我就不仔细在这里介绍了。可以参考大佬们的博客。直通车!!!(飞机票)
3、激光和相机之间的投影
这里就直接上全部代码了,关键部分的代码解读,参考这行的飞机票。python版本的点这个链接。
#include<iostream>
#include<opencv2/opencv.hpp>
#include<string>
#include<pcl/io/pcd_io.h>
#include<pcl/common/transforms.h>
#include<pcl/console/parse.h>
#include<pcl/visualization/range_image_visualizer.h>
#include<pcl/common/common_headers.h>
#include<pcl/visualization/pcl_visualizer.h>
#include<pcl/visualization/cloud_viewer.h>
using namespace std;
struct fileArg
{cv::Mat extrinsic_mat, camera_mat,dist_coeff; //外参矩阵,内参矩阵,畸变矩阵cv::Mat rotate_mat,transform_vec; //旋转矩阵,平移向量
};struct calcuArg
{cv::Mat rotate_mat;cv::Mat transform_vec;cv::Mat rotate_vec;
};void getMatrixFromFile(cv::String filePath, fileArg& filearg, calcuArg& calarg) { cv::FileStorage fs(filePath, cv::FileStorage::READ); //打开标定结果文件if(!fs.isOpened()) cout<< "open failed"<<endl; fs["CameraExtrinsicMat"] >> filearg.extrinsic_mat; //从文件里读取4x4外参矩阵fs["CameraMat"] >>filearg.camera_mat; //从文件里读取3x3相机内参矩阵fs["DistCoeff"] >> filearg.dist_coeff; //从文件里读取5x1畸变矩阵fs.release(); //关闭文件calarg.rotate_mat=cv::Mat(3, 3, cv::DataType<double>::type); // 将旋转矩阵赋值成3x3矩阵for(int i=0;i<3;i++){for(int j=0;j<3;j++){calarg.rotate_mat.at<double>(i,j)=filearg.extrinsic_mat.at<double>(j,i); // 取前三行前三列}}//cv::transpose( filearg.camera_mat ,filearg.camera_mat);网上说先做转置,但是转了效果不对calarg.rotate_vec = cv::Mat(3, 1, cv::DataType<double>::type); cv::Rodrigues(calarg.rotate_mat, calarg.rotate_vec);calarg.transform_vec=cv::Mat(3, 1, cv::DataType<double>::type); //将平移向量赋值成3x1矩阵calarg.transform_vec.at<double>(0)=filearg.extrinsic_mat.at<double>(1,3);calarg.transform_vec.at<double>(1)=filearg.extrinsic_mat.at<double>(2,3);calarg.transform_vec.at<double>(2)=-filearg.extrinsic_mat.at<double>(0,3);
}void projection(const pcl::PointCloud<pcl::PointXYZI>::Ptr&ccloud, pcl::PointCloud<pcl::PointXYZRGB>::Ptr & rgb_cloud,cv::Mat&img, fileArg& filearg, calcuArg& calarg) {vector<cv::Point3f> points3d; //存储点云点的vcector,必须存储成cv::Point3f格式points3d.reserve(ccloud->size()+1); //先给points3d分配足够大的内存空间,避免push_back时频繁复制转移cv::Point3f point;for(int i=0;i<ccloud->size();i++){point.x=ccloud->points[i].x;point.y=ccloud->points[i].y;point.z=ccloud->points[i].z;points3d.push_back(point); //逐个插入}vector<cv::Point2f> projectedPoints; //该vector用来存储投影过后的二维点,三维点投影后变二维cv::projectPoints(points3d, calarg.rotate_vec,calarg.transform_vec,filearg.camera_mat,filearg.dist_coeff,projectedPoints);//获取点云投影数据,并限制在相机视角内vector<cv::Point2f> pointInImg;for(int i=0; i<projectedPoints.size(); i++){cv::Point2f p = projectedPoints[i];float x = p.x;float y = p.y;if(x>=0 && x<=1920 && y>=0 && y<=1080) { //这里的相机分辨率是1920*1080的,所以选择区域时要填自己相机的分辨率pointInImg.push_back(p);}}pcl::PointXYZRGB point_rgb;//pcl::PointCloud<pcl::PointXYZRGB>::Ptr point_rgb (new pcl::PointCloud<pcl::PointXYZRGB> );//遍历投影结果for (int i = 0; i<projectedPoints.size(); i++){cv::Point2f p = projectedPoints[i];// 由于图像尺寸为1920x1080,所以投影后坐标不在图像范围内的点不保存if (p.y<1080&&p.y>=0&&p.x<1920&&p.x>=0 && ccloud->points[i].x>0) {point_rgb.x=ccloud->points[i].x;point_rgb.y=ccloud->points[i].y;point_rgb.z=ccloud->points[i].z; point_rgb.r=int(img.at<cv::Vec3b>(p.y,p.x)[2]); //读取像素点的rgb值point_rgb.g=int(img.at<cv::Vec3b>(p.y,p.x)[1]);point_rgb.b=int(img.at<cv::Vec3b>(p.y,p.x)[0]);//对于投影后在图像中的点进行染色后加入点云rgb_cloudrgb_cloud->push_back(point_rgb); }}for(int i=0; i<pointInImg.size(); i++) { //在图像上画实心圆点cv::circle(img, pointInImg[i], 3, cv::Scalar(255,0,0), -1);}
}int main(int argc, char** argv) {cv::String argpathfile = "xxxx.yaml"; //这里输入标定参数的yaml信息string pcdPath = argv[1]; //命令行第一个参数时pcd的。cv::String imgPath = argv[2];//第二个参数是jpg文件的。fileArg fileinfo;calcuArg calout;pcl::PointCloud<pcl::PointXYZI>::Ptr cloud_tmp (new pcl::PointCloud<pcl::PointXYZI> );pcl::PointCloud<pcl::PointXYZRGB>::Ptr rgb_cloud (new pcl::PointCloud<pcl::PointXYZRGB> );if(pcl::io::loadPCDFile("./data/" + pcdPath, *cloud_tmp)<0) { //打开pcd图像PCL_ERROR("Error loading cloud %s.\n", "pcdPath");return -1;}cv::Mat img = cv::imread("./data/" + imgPath, CV_LOAD_IMAGE_UNCHANGED); //打开jpg图像//cv::imshow("Img", img);//获取矩阵信息getMatrixFromFile(argpathfile, fileinfo, calout);//将点云信息投影到图像上projection(cloud_tmp, rgb_cloud ,img, fileinfo, calout);cv::imshow("Img", img);cv::waitKey(0);//点云可视化boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer (new pcl::visualization::PCLVisualizer ("3d Viewer"));viewer->setBackgroundColor (0, 0, 0);pcl::visualization::PointCloudColorHandlerRGBField<pcl::PointXYZRGB> rgb(rgb_cloud);viewer->addPointCloud<pcl::PointXYZRGB>(rgb_cloud,rgb,"sample cloud");viewer->setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "sample cloud");viewer->addCoordinateSystem (1.0);viewer->initCameraParameters ();while(!viewer->wasStopped()) {viewer->spinOnce();}return 0;
}
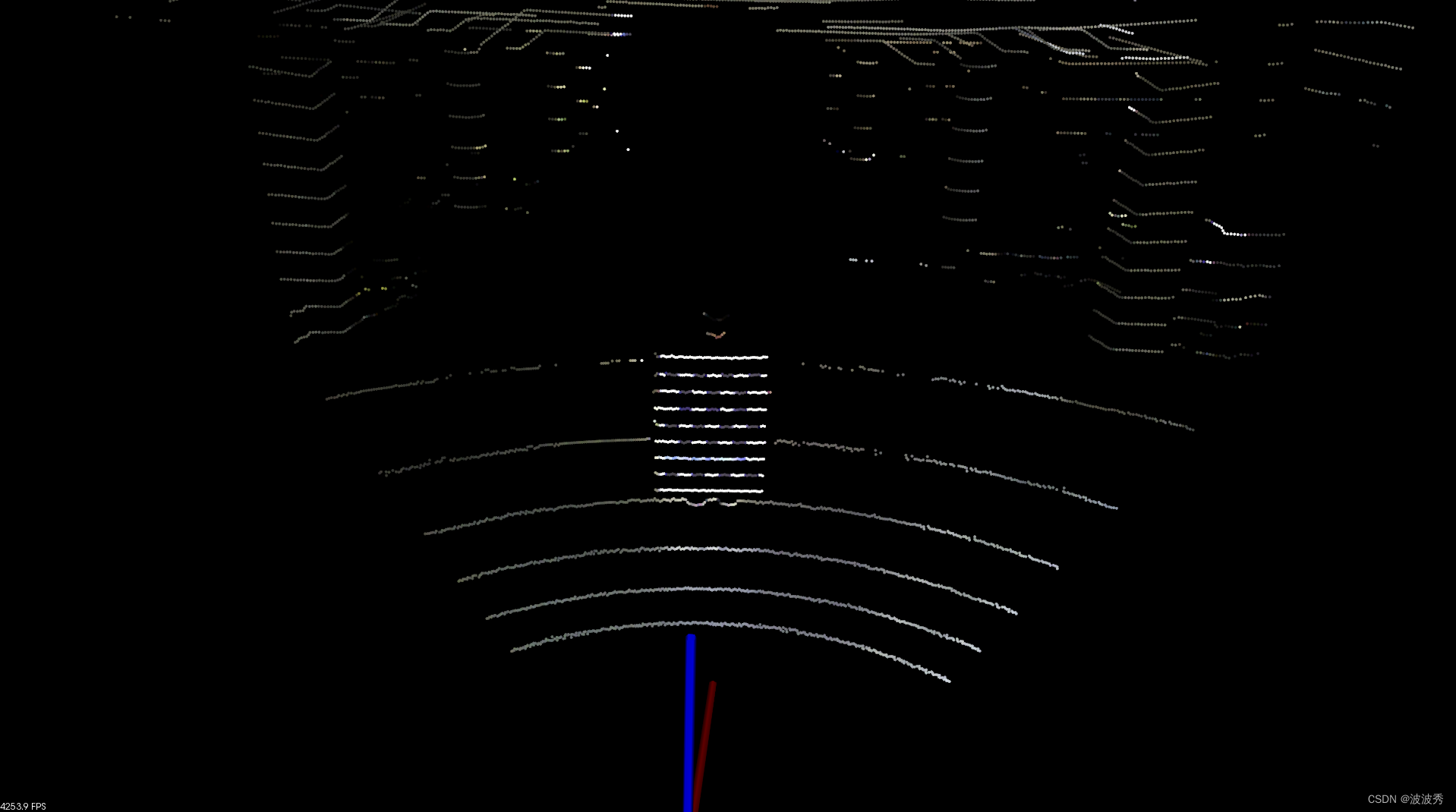
这里直接放相机视角下的点云信息。程序还可以生成投影了点云的图像信息,这个信息和标定的结果相关。
这篇关于将激光点云数据投影到二维图像及对三维点云上色的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





