本文主要是介绍观察级水下机器人使用系列之七机械手臂,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
本期是观察级水下机器人使用系列的最后一期,主要讲ROV所使用的机械臂。机械臂正式名称为5功能电动机械,型号为BE-500,由法国公司Ocean Innovation System设计的,可代替人工进行水下作业,完成海底样品采集、打捞、设备定位等任务。
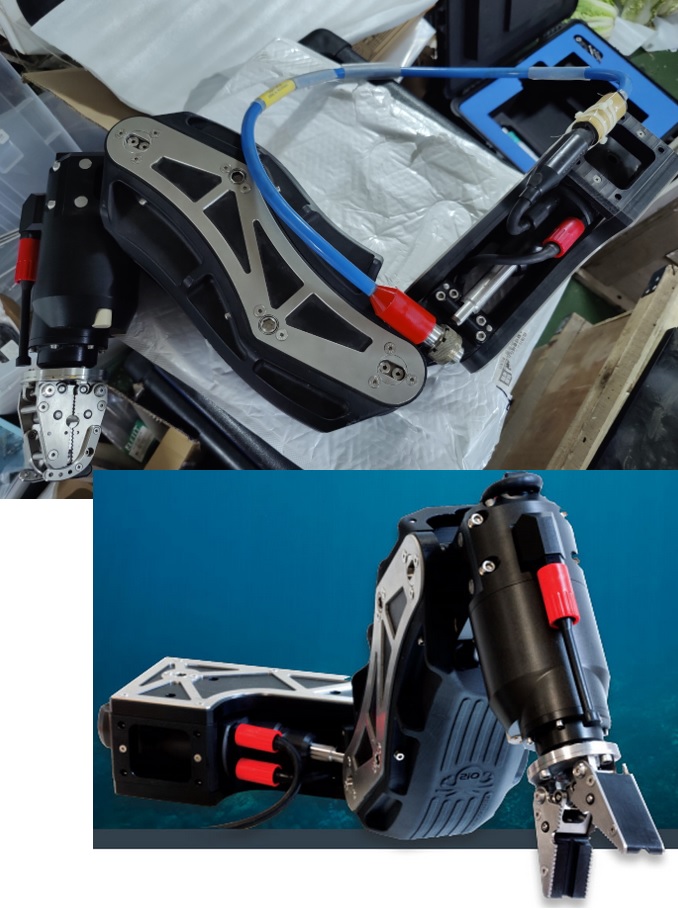
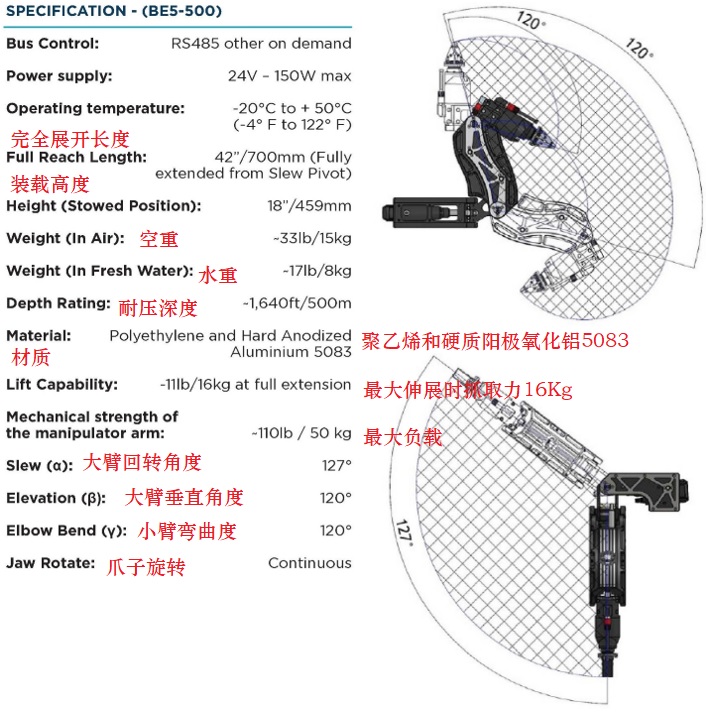
机械臂的技术参数如下图,主要参数有抓取力,臂展和大小臂的旋转角度。
机械手的关节一般分为转动环节和移动关节,机械手通过各关节配合运动来完成不同的动作。机械手按驱动方式的不同,可以分为气压驱动方式、电力驱动方式和液压驱动方式。一般中小型ROV使用电驱动,深重型ROV使用液压驱动。

国外水下机械具有代表的公司有美国的Schilling公司、英国的Hydro-Lek公司等。
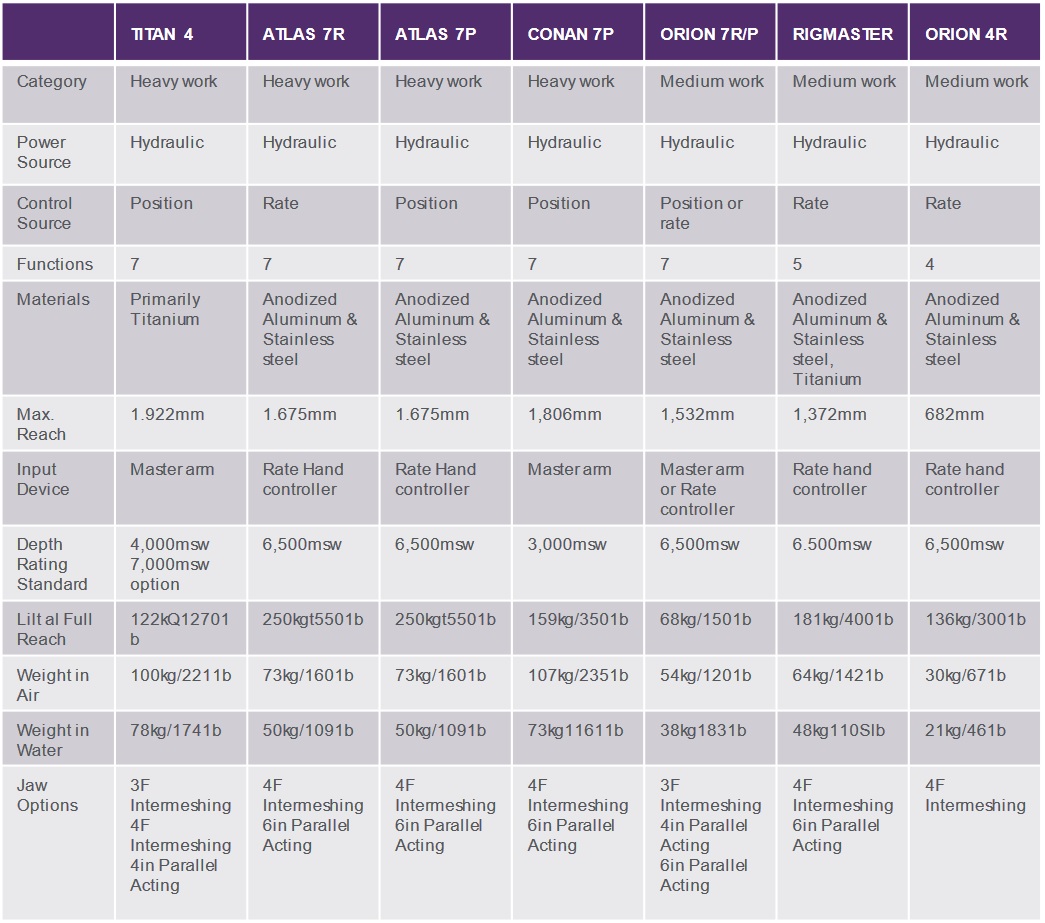
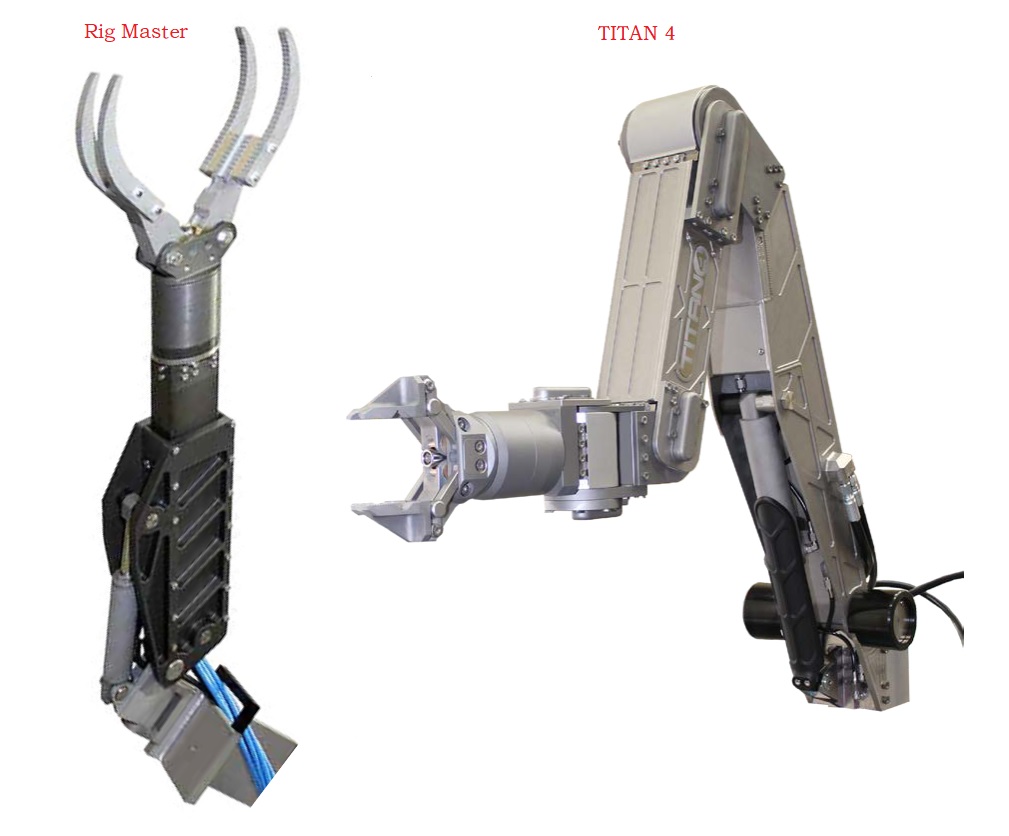
Schilling公司具有代表性有四自由度机械手Rig Master、六自由度机械手CONA4、是六自由度机械手TITAN4、六自由度机械手Orion7P/7R等。这些机械手都可以根据水下机器人的动力配比和实际作业要求,直接搭载在水下机器人上应用,能够实现伸、缩、转、摆、握、张等功能。
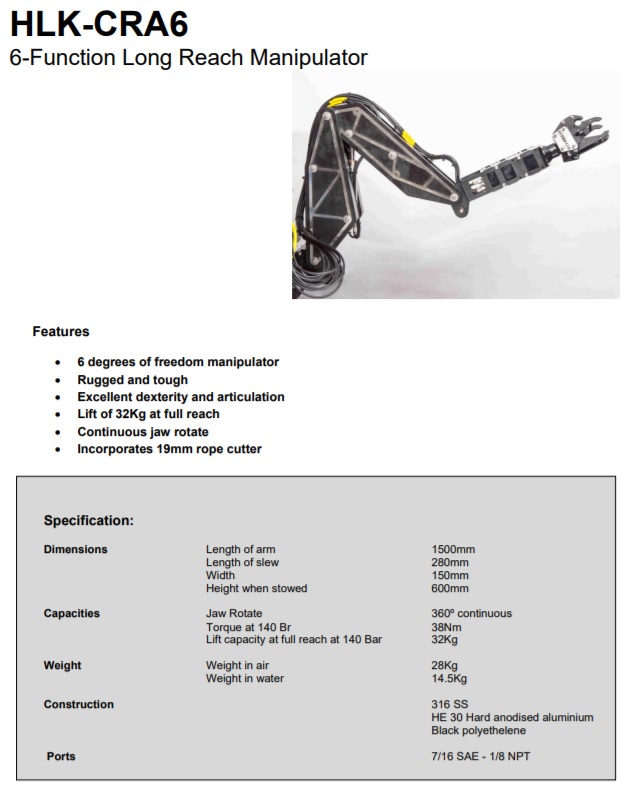
Hydro-Lek公司的HLK-CRA6 为六自由度机械手,最大臂展可达到1500mm,这就使其具有较大的作业范围。腕部最大扭矩为
38N·m,完全伸长状态的抬举力为 32kg。
HLK-RHD5 为四自由度重型机械手,其特点是在满载时最大抬举力可以达到 80kg,这就使其可以完成较大负荷的作业任务。其最大臂展为 943mm,空气中重量为 32kg,腕部最大扭矩为 38N·m。

国内研究水下机械手主要有中国科学院沈阳自动化研究所、华中科技大学、哈尔滨工程大学和浙江大学等单位。
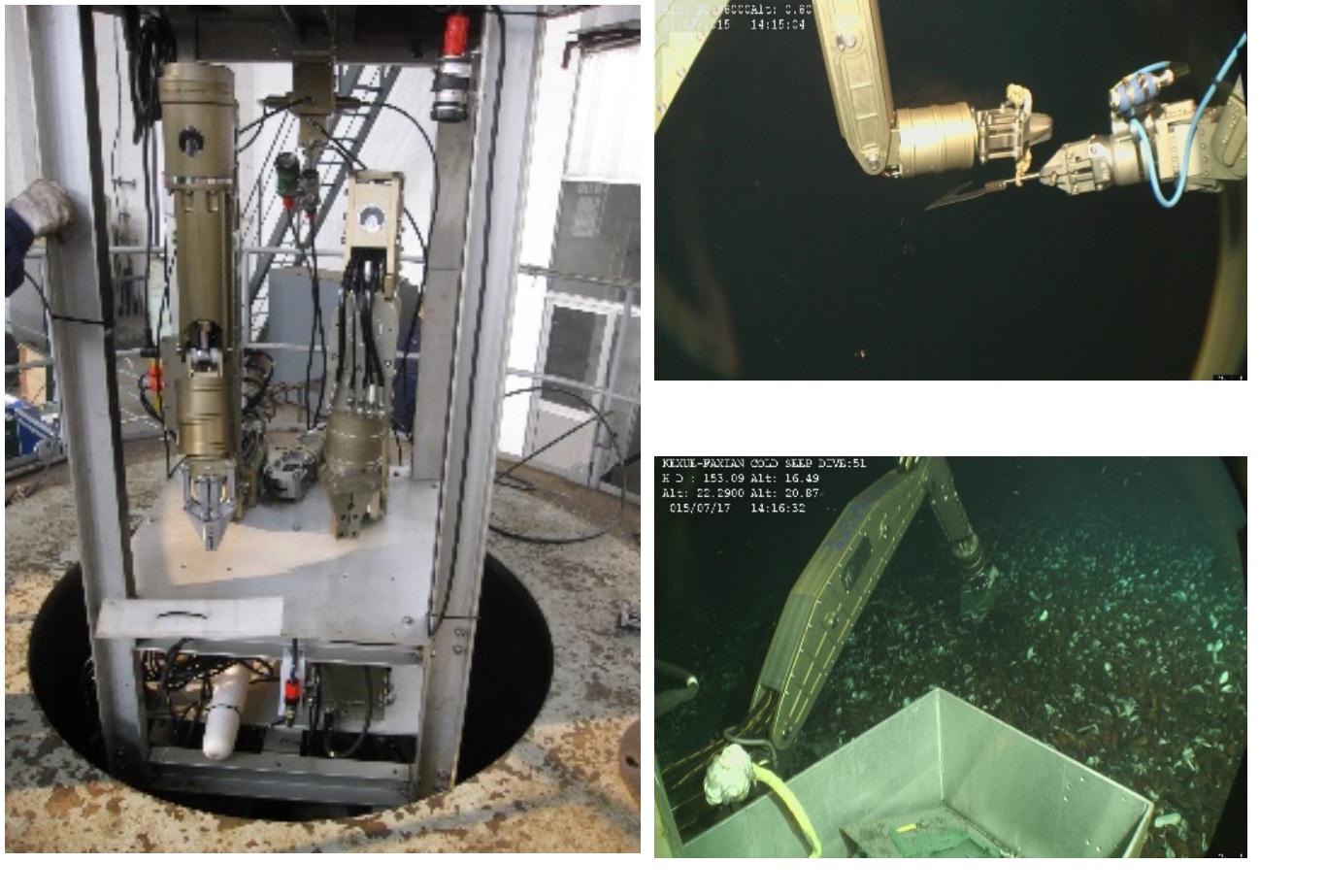
沈阳自动化所水下机器人技术团队研发的7功能液压机械手可执行肩部摆动、肩部俯仰、肘部俯仰、肘部摆动、腕部摆动、腕部转动和夹钳开合7个动作,设计水深是7000米,最大伸长范围为1.9米,全臂展最大持重达65公斤。2015年7月,压机械手搭载“发现”号ROV,在1100米冷泉区完成了9次下潜,执行了样品采集、样品回收及采样器触发等操作,圆满地完成了科学考察任务,这是该机械手首次开展科学考察作业应用。
哈尔滨工程大学近年来开始致力于水下机械手的研究,其研制的SIWR-II型水下机械手具有五个自由度,该机械手采用液压驱动,其特点是在机械手末端的连接端口可以根据作业要求更换作业工具,完成切割、焊剂、打磨等不同作业内容。
浙江大学研制了一款六自由度水下机械手,机械手采用主从式控制方式,其操作手柄是缩小了1/8 的小型手柄。该水下机械手的工作水深可以达到7000m,最大臂展为 2.1m,最大抬举力为 60kg,腕关节最大扭矩为 180N·m
水下机械手是重要的水下作业工具,在海洋开发中发挥着至关重要的作用。操作ROV机械手的人员叫做领航员,为了减少培训成本,国内外都是利用 ROV 模拟器实现对 ROV 领航员进行培训。
参考文献
ROV水下作业培训系统七功能机械手臂的设计与仿真_李学平
基于凸轮曲线理论的机械手对ROV本体位姿影响效果分析_王妍
浅谈水下机器人的机械手_马辰
深海重型ROV双机械手设计与研究_杨明岩
https://www.hydro-international.com/content/news/underwater-manipulator-arm-designed-by-ois
https://www.oceannews.com/news/subsea-and-survey/ocean-innovation-system-s-underwater-manipulator-arm-at-ocean-business
http://www.hydro-lek.com/rotary_actuators.php
https://www.cas.cn/kx/kpwz/201510/t20151023_4444029.shtml
这篇关于观察级水下机器人使用系列之七机械手臂的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




