本文主要是介绍自动驾驶之夜间检测调研,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1. ExDark
第一个 公开 特定的提供 natural low-light images for object的数据集
7363张 low-light images,
12 classes
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-VK2Wz60U-1670641306011)(:/bbcf37f6b5974f919c036fd4eee77238)]](https://img-blog.csdnimg.cn/39d3a1d1166746d9bfb1d5bbc1deb3ab.png)
Low-light image enhancement:
- IVC database. general image enhancement而非特指low-light. 黑夜是人工合成的,可以找到原图像
- See-in-the-Dark dataset (SID): 5094个短曝光(low-light)图像对应到424张长曝光图像(bright)
- LOw light paired dataset (LOL): 500对图像
都含有一对图!!!
但是 SID和LOL都不能展示真实的夜晚灯光环境.
为了保证图像能对应上,使用特定相机并且不含有动态目标(例如cars,people等).
Low-light denoising
是low-light enhancement的一个子集, 但是这些图都是人工合成的,加入Poisson或者Gaussian噪声到合成的黑夜图像中.
Low-light surveillance
热相机和红外相机一般在夜晚监控中使用. 主要集中在人脸识别、行人检测。
数据集有OTCVBS,LSI和LDHF.
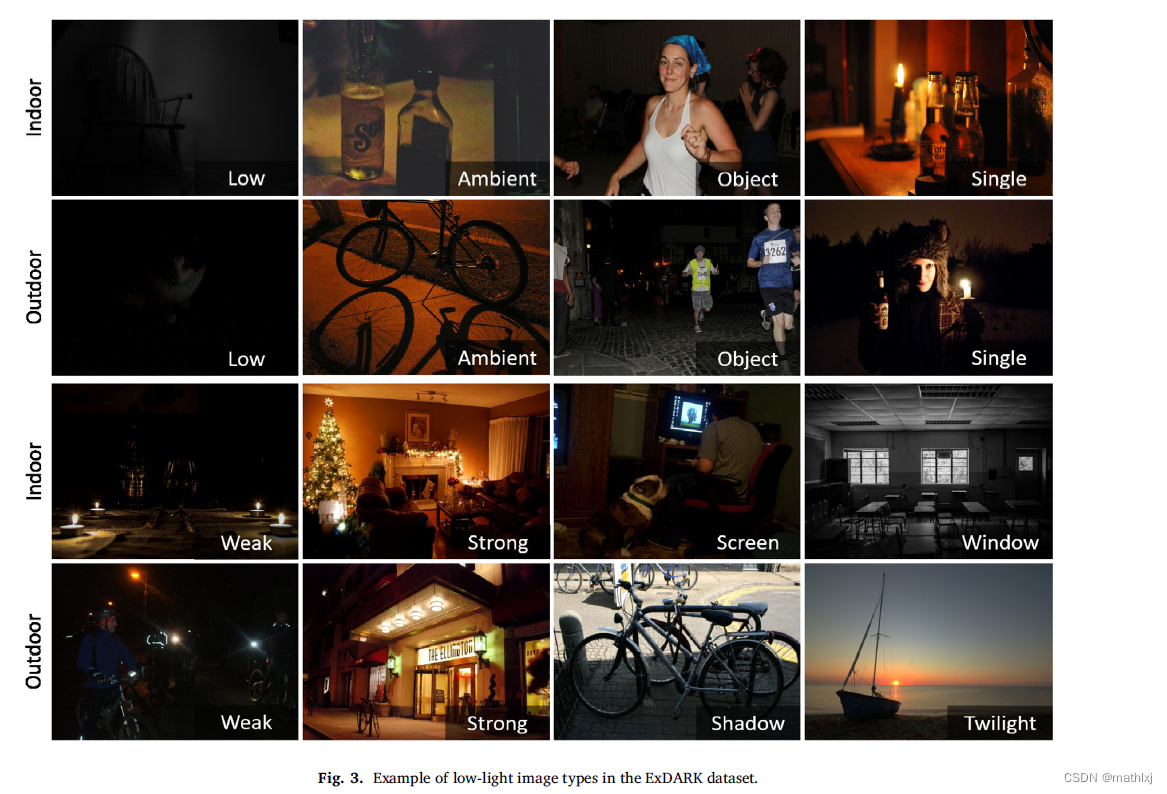
ExDark数据集
对low-light condition进行细划分, 例如一天中的黄昏(twilight)还是夜晚(nighttime),位置(indoor,outdoor)、光源可见度、光源类型(太阳、人造光).
-
12类别: Bicycle, Boat, Bottle, Bus, Car, Cat, Chair, Cup, Dog, Motorbike, People, and Table.
-
数据收集:网上下载,关键词(dark, low-light,nighttime); 公开数据集(PADCAL VOC, ImageNet和COCO);电影中提取;手动拍摄
-
标注: 手动标注
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-H5f7eTZ3-1670641306012)(:/313977abd4c0435f9edab51919a1b6ee)]](https://img-blog.csdnimg.cn/2ea545431f0c4627959b75b91df122e6.png)
-
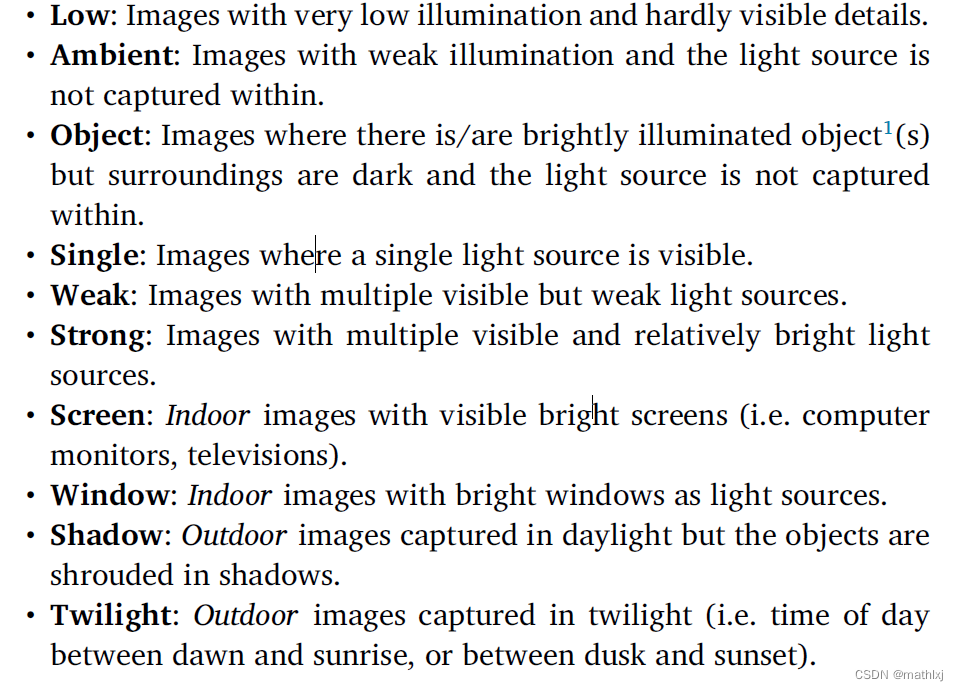
十种灯光类型:
- Low: 光线最暗,几乎看不清细节
- Ambient: 灯光weak, 光源没有捕捉进来
- Object: 目标较亮但是周围环境很暗,光源没有捕捉进来
- Single: 只能看到一个光源
- Weak: multiple visible但是weak光源
- Strong:multiple visible但是相对亮的光源
- Screen: 户内图像,可见亮的屏幕
- Window: 户内图像,以窗户为亮光源.
- Shadow:户外图像,户外光源,目标在阴影处
- Twilight:户外,黄昏. 黎明到太阳升起; 微暗到太阳落下.
2. 增强 Survey
-
传统方法:
- Histogram Equalization-based methods
- Retinex model-based methods: 例如将一张图解耦为一个reflection部分和一个illumination部分, reflection部分即为增强的结果.
缺点: 多光源时会丢失细节和颜色;噪声被忽略了;找到这样一个prior或regularization比较困难;运行时间长.
-
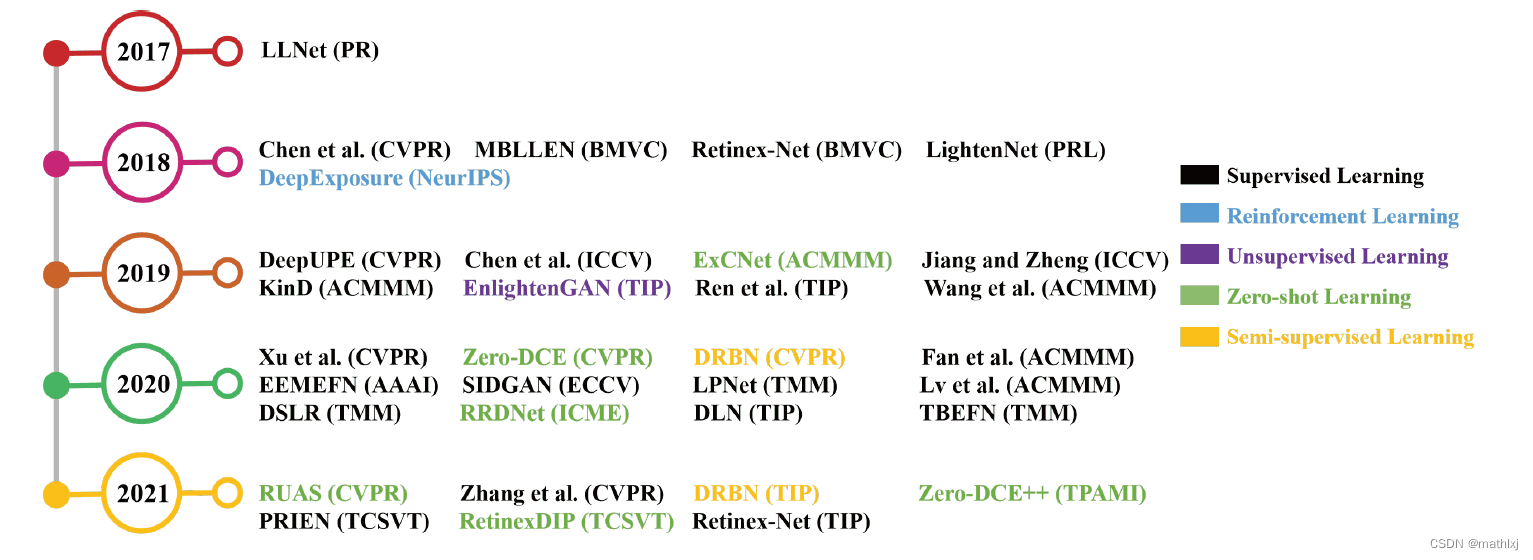
DL方法:更高精度、更加鲁棒、速度更好
- 方法包括:监督学习、强化学习、无监督学习、Zero-shot learning和半监督学习.
- 方法包括:监督学习、强化学习、无监督学习、Zero-shot learning和半监督学习.
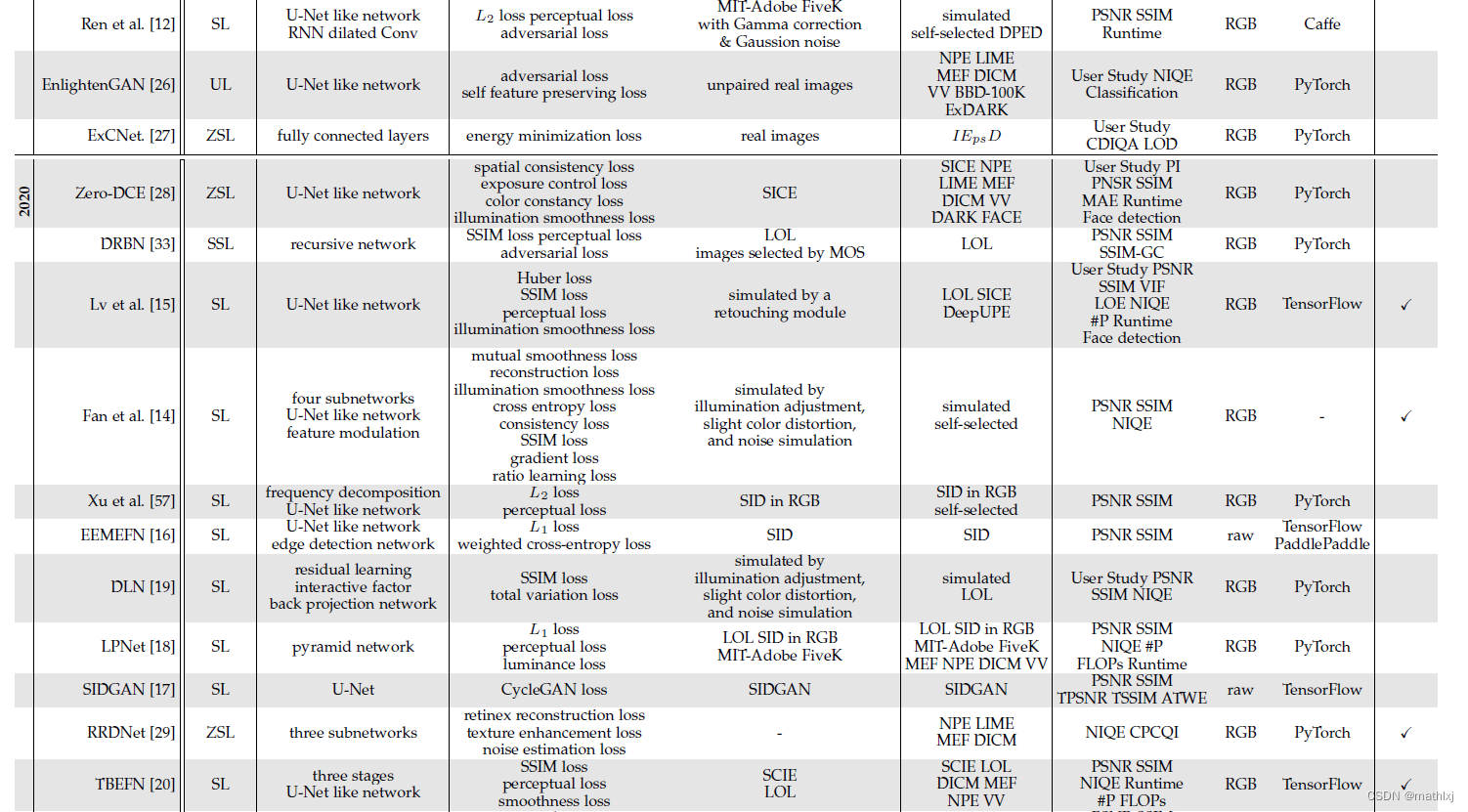
学习策略
- 监督学习:分为end-to-end, deep
Retinex-based 和realistic data-driven methods.-
end-to-end: LLNet, MBLLEN,EEMEFN,LPNet,DSLR,
-
Retinex-based: 利用物理可解释的Retinex理论.
将illuminance部分和reflectance部分分开增强. 例如Retinex-Net,lightweight LightenNet,而DeepUPE学习从Image到illumination的映射;KinD,KinD++ -
数据集: SID, DIV(视频),SMOID(视频),SIDGAN(视频)
-
- 强化学习:DeepExposure,即首先根据曝光切分为sub-image, 局部曝光是强化学习学到的,奖惩函数类似于对抗学习. 再将局部曝光修整图像,获取不同曝光下的图像.
- 无监督学习: 有监督的学习受限于泛化能力. 无监督学习EnligthenGAN,采用一个attention-guided U-Net作为生成器,使用global-local discriminators来使得增强结果跟自然光线相似.
- Zero-Shot Learning:直接从test data中学习增强,例如ExCNet, 首先拟合测试集一个最优的S曲线,然后根据S曲线,使用Guided filter划分为base layer和datail layer, 根据S曲线调整base layer,最后使用Weber contrast来融合detailed layer和调整后的base layer.;还有RRDNet,将图像分为illumination, reflectance和noise; RetinexDIP使用NN进行Retinex分解,然后增强low-light image; Zero-DCE/zero-DCE++将光线增强视为一个image-specific curve estimation,输入一个low-light图像输出一个伪high-order曲线.
- Semi-Supervised Learning:DRBN,首先恢复一个linear band representation,以监督的方式,然后通过无监督学习到的linear transformation进行增强.
网络技巧
- 网络结构: 常见U-Net, pyramid network和multi-stage network.
- Deep Model和Retinex Theory结合.

-
损失函数:
- Reconstruction Loss(重构损失): L2倾向于乘法较大的错误,但是对较小错误容忍度高;L1损失保留颜色和luminance较好但是忽略了局部结构;SSIM保留了结构和纹理
- Perceptual Loss: 和gt在feature map空间中的相似度. 特征提取网络为从一个在ImageNet训练的VGG16.
- Smoothness Loss:移除结果中的噪音或保留相邻像素点的关系
- 对抗损失:生成的图被辨别的损失
- Exposure Loss: 不需要匹配的图,直接衡量曝光度的损失
- 训练集:
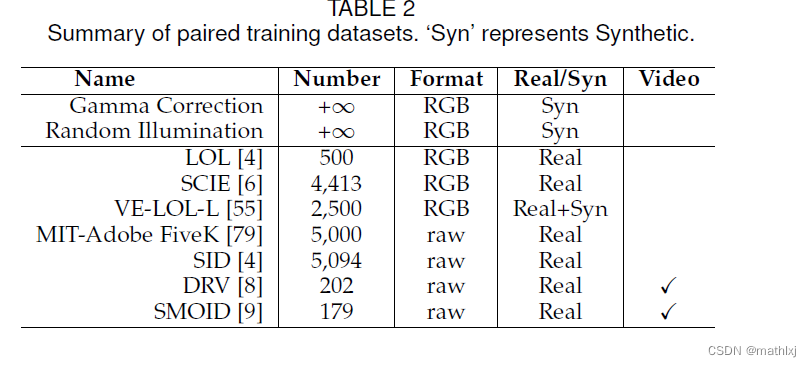
LOL: 500对 低光照和正常光照的图
SCIE: 589个户内/户外的场景,每个场景有3-18个不同曝光的图,因此有4413个多曝光的图. 选取589张高质量的图.分辨率在3000x2000和6000x4000
MIT-Adobe FiveK: 5000张图
SID:5094张短曝光的图,每个有个对应的长曝光的图
VE-LOL:2500对,1000对是合成的,1500对是真实的
DRV:202个原始的视频,每个对应一段长曝光的gt. 16-18fps/ 3672x5496
SMOID:179对序列,每个200帧- 测试集:
BBD-100K:视频,10000个视频,使用在晚上拍的用来做测试集
ExDARK:
DARK FACE: 6,000张晚上拍的人脸
-
作者提出新的数据集: LLIV-Phone,120视频,45,148个图像,18张手机类型,
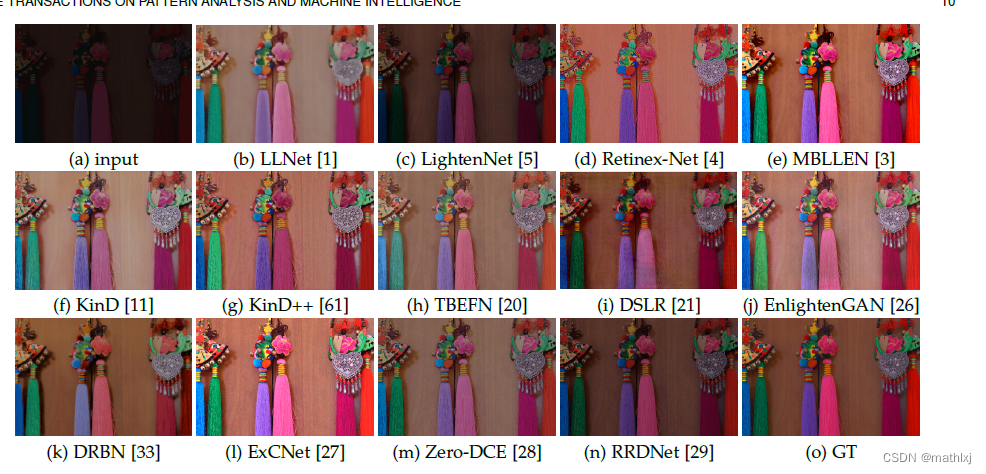
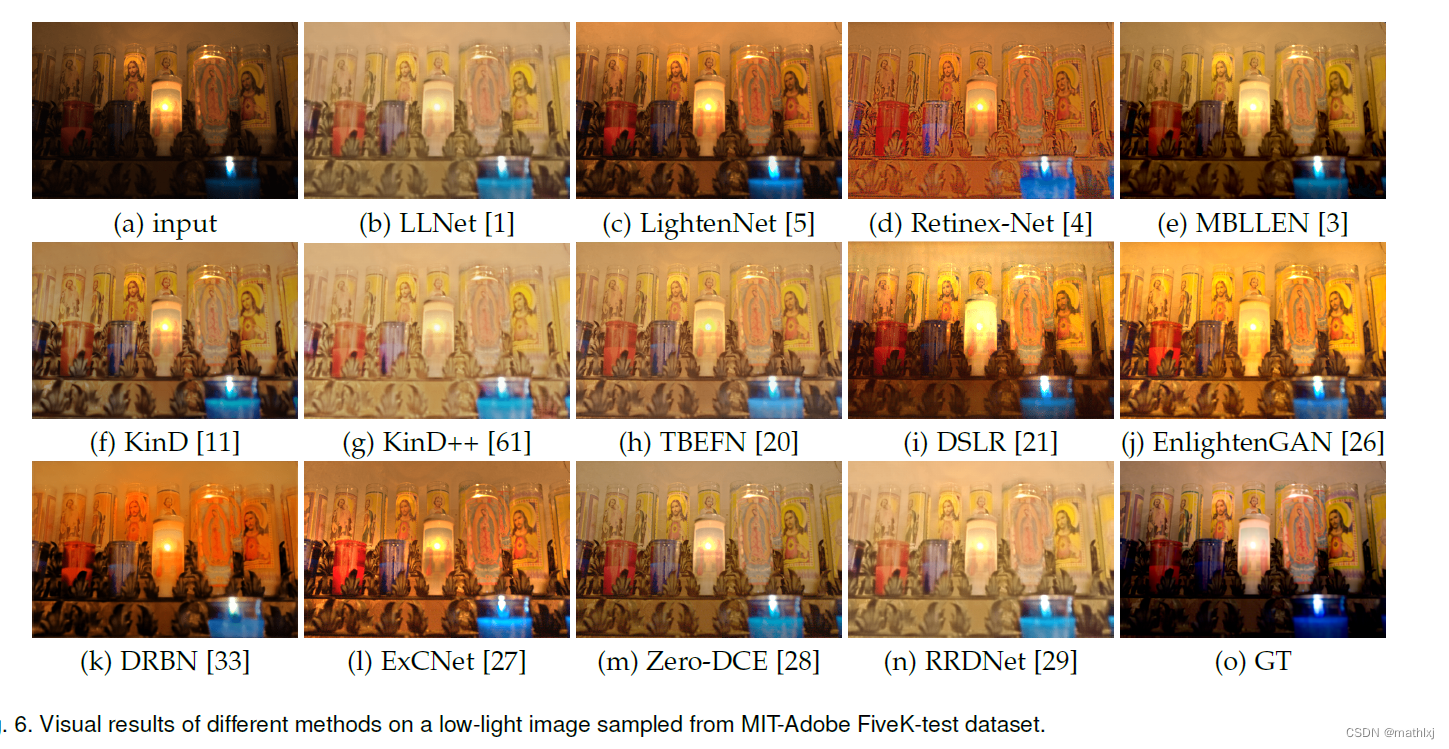
结果展示
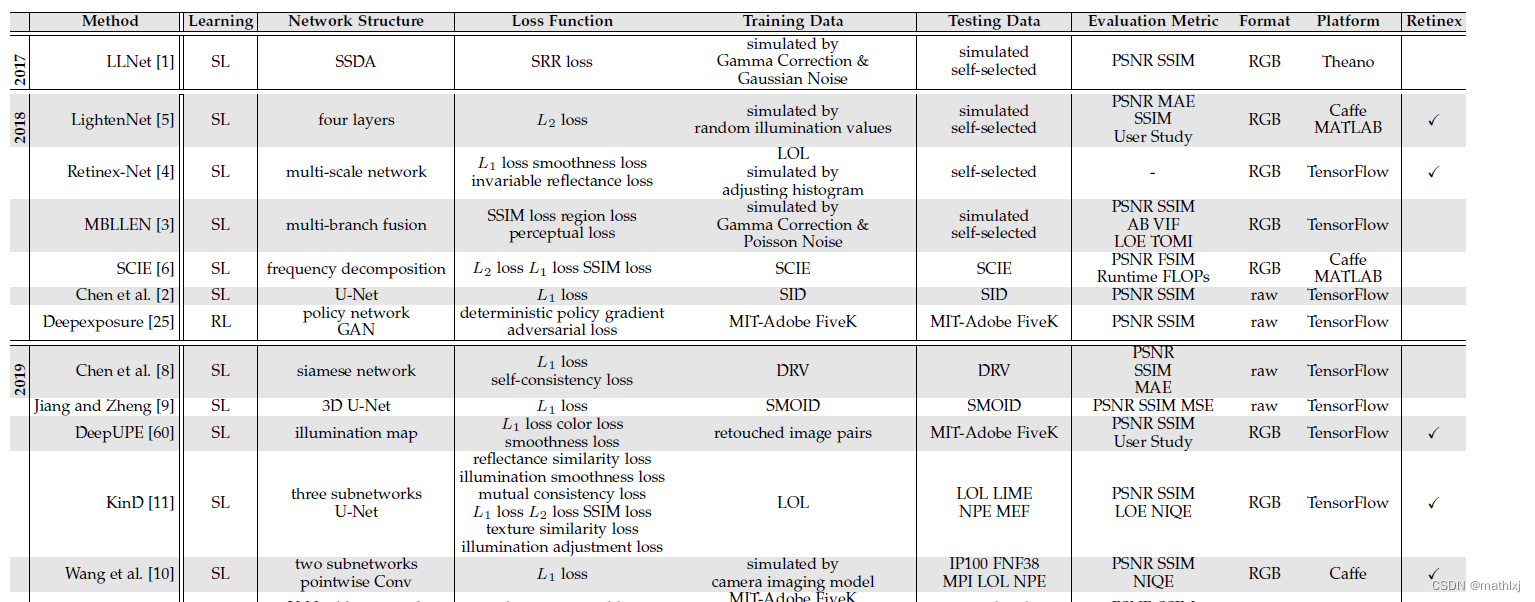
方法对比
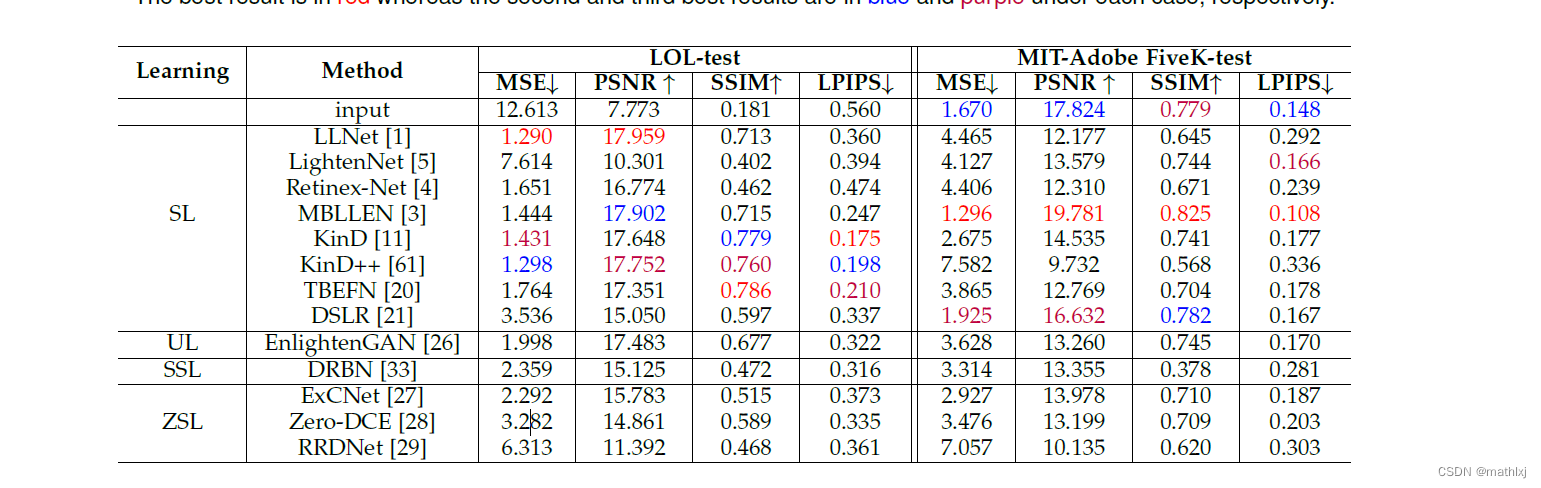
在1080ti上测速,输入1200x900x3,32张求平均
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-6lRd3DNk-1670641306018)(:/d7085b61dec34013978b36ba3901ac3c)]](https://img-blog.csdnimg.cn/e4a1ff8505674940bd2d13e849f6ebf3.png)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-QIwAr9Gl-1670641306019)(:/caa512055ab945799c41474832a3724e)]](https://img-blog.csdnimg.cn/4220d4894210463d936d0d4e7c482521.png)
这篇关于自动驾驶之夜间检测调研的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







