本文主要是介绍记录::关键点检测数据转化和可视化LSP、FLIC转yolov8-pose的txt,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
最近想试一下关键点检测的效果,先从yolov8-pose开始,不想跑coco那么大的数据集,就找了两个比较小的
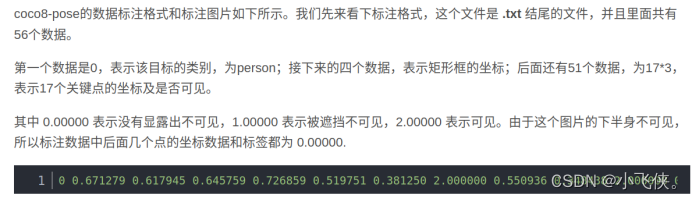
yolov8-pose的txt数据格式如下:
类别、box、节点,数据做了归一化
可视化只显示了点,没有连线
参数:
mat_path 是 数据集mat文件所在地址,包含mat文件名
image_path 是 数据集图像的地址,不包含图像名
save_path 是 转换为txt后保存的地址
save_path 是可视化结果保存的地址
1、lsp
LSP:运动场景,单人数据集,截取后的单人区域,图片很小,2000张图片,14个节点
def save_joints_lsp(mat_path, image_path, save_path,save_path1):"""mat_path 是 lsp数据集mat文件所在地址,包含mat文件名image_path 是 lsp数据集图像的地址,不包含图像名save_path 是 转换为txt后保存的地址save_path 是可视化结果保存的地址lsp数据集共2000张图片"""joints = loadmat(mat_path)joints = joints["joints"].transpose(2, 0, 1)joints = joints[:, :, :]#num = 0for img_path in glob.glob("%s/*.jpg" % image_path):img_name = img_path.split("/")[-1].split(".")[0]img = Image.open(img_path)img = np.array(img, dtype=np.uint8)img = cv2.cvtColor(img, cv2.COLOR_RGB2BGR)imgh, imgw = img.shape[:2]num = int(img_name[2:])cen_points = joints[num-1, ...]points_num = cen_points.shape[-1]point_dict = {}ps = []for points_ in range(points_num):point_x = cen_points[0, points_]point_y = cen_points[1, points_]vi = cen_points[2, points_]if vi==0:vi = 2.0elif vi==2:print(name)point_dict[str(points_)] = [point_x/imgw, point_y/imgh,vi]# cv2.circle(img, (int(point_x), int(point_y)), 5, colors[points_],# thickness=-1)ps.append([int(point_x), int(point_y)])# x, y, w, h = cv2.boundingRect(np.array([ps]))# x = (x+w/2)/imgw# y = (y+h/2)/imgh# w = (w+6)/imgw# h = (h+6)/imghx =0.5y = 0.5w =1h=1with open(os.path.join(save_path, img_name + ".txt"), "w") as f:f.write(str(0)+" "+str(x)+" "+str(y)+" "+str(w)+" "+str(h))cv2.rectangle(img,(int(x*imgw-w*imgw/2),int(y*imgh-h*imgh/2)),(int(x*imgw+w*imgw/2),int(y*imgh+h*imgh/2)),(0,0,255),5)for i in point_dict:p = point_dict[i]f.write(" "+str(p[0]) + " " + str(p[1]) + " " + str(p[2]))cv2.circle(img, (int(p[0]*imgw), int(p[1]*imgh)), 5, colors[points_],thickness=-1)f.write("\n")#img_txt.write(str(point_dict))f.close()#num += 1# 若不想看图片中关键点的位置是否准确,请注释掉后面两行# cv2.imshow("img", img)# cv2.waitKey()cv2.imwrite(save_path1+"/"+img_name+".jpg",img)2、FLIC
FLIC:电影场景,多人情况下label也只有单人,labels有29个节点,大多为nan,选了9个节点
def save_flic(mat_path, image_path, save_path,save_path1):examples = loadmat(mat_path)examples = examples["examples"][0]joint_ids = ['lsho', 'lelb', 'lwri', 'rsho', 'relb', 'rwri', 'lhip','lkne', 'lank', 'rhip', 'rkne', 'rank', 'leye', 'reye','lear', 'rear', 'nose', 'msho', 'mhip', 'mear', 'mtorso','mluarm', 'mruarm', 'mllarm', 'mrlarm', 'mluleg', 'mruleg','mllleg', 'mrlleg']available = ['lsho', 'lelb', 'lwri', 'rsho', 'relb', 'rwri', 'lhip','rhip', 'head']for i, example in enumerate(examples):joint = example[2].Timg_name = example[3][0]joints = dict(zip(joint_ids, joint))img =cv2.imread(image_path+"/"+img_name)img_name = img_name.split(".")[0]imgh, imgw = img.shape[:2]point_dict = {}ps = []head = np.asarray(joints['reye']) + \np.asarray(joints['leye']) + \np.asarray(joints['nose'])head /= 3joints['head'] = head.tolist()for name in available:#joint_pos.append(joints[name])point = joints[name]point_dict[name] = [point[0]/imgw, point[1]/imgh,2.0]ps.append([int(point[0]), int(point[1])])x, y, w, h = cv2.boundingRect(np.array([ps]))x = (x+w/2)/imgwy = (y+h/2)/imghw = (w+20)/imgwh = (h+20)/imghwith open(os.path.join(save_path, img_name + ".txt"), "w") as f:f.write(str(0) + " " + str(x) + " " + str(y) + " " + str(w) + " " + str(h))cv2.rectangle(img, (int(x * imgw - w * imgw / 2), int(y * imgh - h * imgh / 2)),(int(x * imgw + w * imgw / 2), int(y * imgh + h * imgh / 2)),(0, 0, 255), 5)c =0for i in point_dict:p = point_dict[i]f.write(" " + str(p[0]) + " " + str(p[1]) + " " + str(p[2]))cv2.circle(img, (int(p[0] * imgw), int(p[1] * imgh)), 5, colors[c],thickness=-1)f.write("\n")c = c+1# img_txt.write(str(point_dict))f.close()# num += 1# 若不想看图片中关键点的位置是否准确,请注释掉后面两行# cv2.imshow("img", img)# cv2.waitKey()cv2.imwrite(save_path1 + "/" + img_name + ".jpg", img)
完整代码:https://github.com/ziyaoma/detect-pose
参考:LSP数据集与MPII数据集标签转txt文件(字典形式储存)_mpii标注文件修改成txt-CSDN博客
https://github.com/Fangyh09/PoseDatasets
这篇关于记录::关键点检测数据转化和可视化LSP、FLIC转yolov8-pose的txt的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




