本文主要是介绍python数字图像处理基础(七)——直方图均衡化、傅里叶变换,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
- 直方图均衡化
- 均衡化原理
- 均衡化效果
- 标准直方图均衡化
- 自适应直方图均衡化
- 傅里叶变换
- 原理
- 低通滤波
- 高通滤波
直方图均衡化
均衡化原理
图像均衡化是一种基本的图像处理技术,通过更新图像直方图的像素强度分布来调整图像的全局对比度。这样做可以使低对比度的区域在输出图像中获得更高的对比度。
简单理解:改变图像对比度,让色彩更丰富,灰度值直方图:瘦高 -> 均衡
本质上,直方图均衡化的工作原理是:
- 1.计算图像像素强度的直方图
- 2.均匀展开并分布最频繁的像素值(即直方图中计数最大的像素值)
- 3.给出累积分布函数(CDF)的线性趋势
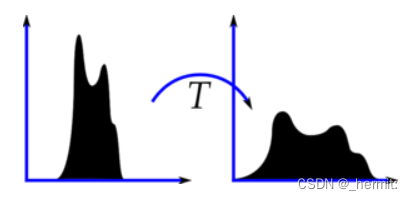
注意到以上直方图有许多峰值,这表明有很多像素被归入到这些各自的bin中。使用直方图均衡化,我们的目标是将这些像素分散到没有太多像素的bin中。
均衡化效果
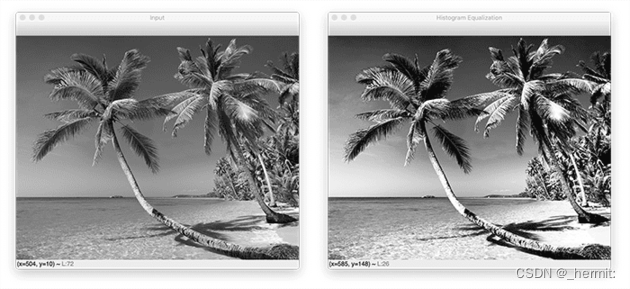
注意输入图像的对比度是如何显著提高的,但代价是也提高了输入图像中的噪声的对比度。
这就提出了一个问题:是否有可能在不增加噪声的同时提高图像对比度?
答案是“是的”,你只需要应用自适应直方图均衡化。
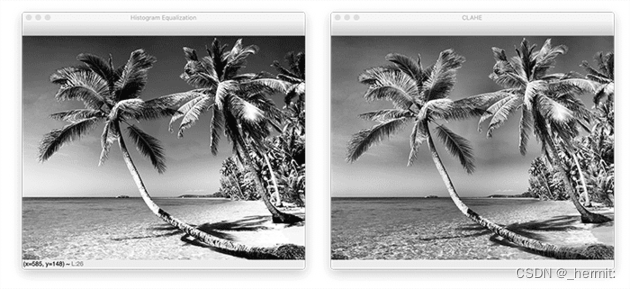
通过自适应直方图均衡化,我们将输入图像划分为M × N网格。然后我们对网格中的每个单元进行均衡处理,从而获得更高质量的输出图像:
标准直方图均衡化
OpenCV 包括通过以下两个函数实现基本直方图均衡和自适应直方图均衡:
cv2.equalizeHist
cv2.createCLAHE
应用cv2.equalizeHist()函数非常简单,只需将图像转换为灰度,然后调用cv2.equalizeHist即可:
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
equalized = cv2.equalizeHist(gray)
自适应直方图均衡化
实现自适应直方图均衡化要求:
1.将输入图像转换为灰度/从中提取单个通道
2.使用cv2.createCLAHE实例化CLAHE算法
3.在CLAHE对象上调用.apply()方法来应用直方图均衡化
这比听起来容易得多,只需要几行代码:
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
clahe = cv2.createCLAHE(clipLimit=2.0, tileGridSize=(8, 8))
equalized = clahe.apply(gray)
注意,我们为cv2.createCLAHE提供了两个参数:
- clipLimit:这是对比度限制的阈值
- tileGridSize:将输入图像划分为M × N块,然后对每个局部块应用直方图均衡化
傅里叶变换
原理
傅里叶变换常用来分析各种滤波器的特性。可以是用2D离散傅里叶变换分析图像的频域特性。
(个人理解,在图像问题当中,频域是指图像的灰度变化,也就是灰度图像的梯度值,这个和轮廓的原理差不多,灰度值变化剧烈的叫做高频分量,例如边界和噪声。灰度值变化缓慢的称谓低频分量)
实现2D离散傅里叶变换(DFT)的的算法叫做快速傅里叶变换(FFT)。
对图像进行X方向和Y方向的傅里叶变换,会得到图像的频域表示图。
直观理解,一个正弦信号,如果幅度变换很快,可以称之为高频信号,如果变换慢,可以称之为低频信号。在图像中,灰度值变化快的位置,可以称之为高频分量(只变化快而不是次数多),灰度值变化慢的称之为低频分量。
图像使用使用二维离散傅里叶变换后得到一个复数矩阵,叫做图像的频谱图。
低通滤波器:只保留低频,会使得图像模糊
高通滤波器:只保留高频,会使得图像细节增强
-
opencv中主要就是从cv2.dftt()和cv2.idft(),输入图像需要先转换成np.float32格式:
img = cv2.imread(‘lena.jpg’, 0)
img_ float32 = np.float32(img)
dft = cv2.dft(img_float32, flags = cv2.DFT_COMPLEX_OUTPUT)
-
得到的结果中频率为0的部分会在左上角,通常要转换到中心位置(故转换后的图像从中心向四周频率增高),可以通过shift变换来实现:
dft_shift = np.fft.fftshift(dft)
-
cv2.dft()返回的结果是复数矩阵,即双通道的(实部,虚部),通常还需要转换成图像格式才能展示(0,255)
magnitude_spectrum = 20*np.log(cv2.magnitude(dft_shift[:, :, 0],dft_shift[:, :, 1]))
img = cv2.imread('33.jpg',0) # 读图
dft = cv2.dft(np.float32(img),flags = cv2.DFT_COMPLEX_OUTPUT) # 傅里叶变换
dft_shift = np.fft.fftshift(dft) # 平移到中心,结果为双通道(实部,虚部)
magnitude_spectrum = 20*np.log(cv2.magnitude(dft_shift[:, :, 0], dft_shift[:, :, 1])) # 转化为频谱图
理解:通过傅里叶变换,将图像转化为频谱图,而低通滤波和高通滤波则是傅里叶变换的逆变换,即通过对频谱图进行一些操作(保留低频/保留高频),从而达到改变原始图像的效果。
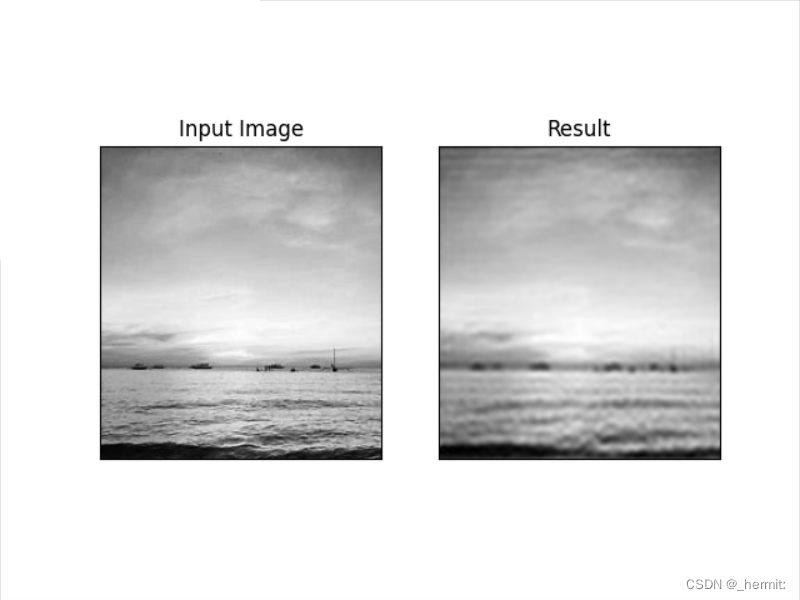
低通滤波
作用:将图像变得平滑,同时也就看起来比较模糊。
做法:利用掩码,把中心部分频率低的保留下来
import numpy as np
import cv2
from matplotlib import pyplot as pltimg = cv2.imread('./image/img1.jpg', 0)img_float32 = np.float32(img)dft = cv2.dft(img_float32, flags= cv2.DFT_COMPLEX_OUTPUT)
dft_shift = np.fft.fftshift(dft)rows, cols = img.shape # 横纵坐标
crow, ccol = int(rows/2), int(cols/2) # 找到中心位置# 低通滤波制作蒙板
mask = np.zeros((rows, cols, 2), np.uint8) # 初始化全部像素点数值置为0
mask[crow-30:crow+30, ccol-30:ccol+30] = 1 # 相当于只有中心位置60*60像素点是1,其余全为0# IDFT傅里叶逆变换 即把dft后得到的按频率分布的奇奇怪怪的图(称为频谱图)变为原来imread进来的图
fshift = dft_shift*mask # 将掩膜和得到的结果结合,即只有中心60*60保留
f_ishift = np.fft.fftshift(fshift) # 做逆变换,当然要把原来fft左上角移到中间的再移回左上角ifft
img_back = cv2.idft(f_ishift) # 逆变换,频谱图还原为原图,但还不能看,因为结果是双通道(实部,虚部)
img_back = cv2.magnitude(img_back[:, :, 0], img_back[:, :, 1]) # 套公式处理,让图像可看plt.subplot(121), plt.imshow(img, cmap='gray')
plt.title('Input Image'), plt.xticks([]), plt.yticks([])
plt.subplot(122), plt.imshow(img_back, cmap='gray')
plt.title('Result'), plt.xticks([]), plt.yticks([])plt.show()
高通滤波
作用:增强边缘,非边缘部分被过滤
做法:使用一个60×60的矩形窗口进行蒙板操作,去除低频分量,使用函数np.fft.ifftshift将图像中心平移回左上角,然后使用函数 np.ifft2()进行FFT逆变换,将得到的复数结果取绝对值。(DFT的逆变换)
与低通滤波唯一的区别就在蒙版的制作
import numpy as np
import cv2
from matplotlib import pyplot as pltimg = cv2.imread('./image/img1.jpg', 0)img_float32 = np.float32(img)dft = cv2.dft(img_float32, flags= cv2.DFT_COMPLEX_OUTPUT)
dft_shift = np.fft.fftshift(dft)rows, cols = img.shape # 横纵坐标
crow, ccol = int(rows/2), int(cols/2) # 找到中心位置# 高通滤波制作蒙板
mask = np.ones((rows, cols, 2), np.uint8) # 初始化全部像素点数值置为1
mask[crow-30:crow+30, ccol-30:ccol+30] = 0 # 相当于只有中心位置60*60像素点是0,其余全为1# IDFT傅里叶逆变换 即把dft后得到的按频率分布的奇奇怪怪的图变为原来imread进来的图
fshift = dft_shift*mask # 将掩膜和得到的结果结合,即只有中心60*60保留
f_ishift = np.fft.fftshift(fshift) # 做逆变换,当然要把原来fft左上角移到中间的再移回左上角ifft
img_back = cv2.idft(f_ishift) # 逆变换,模糊频率图还原为原图,但还不能看,因为结果是双通道(实部,虚部)
img_back = cv2.magnitude(img_back[:, :, 0], img_back[:, :, 1]) # 套公式处理,让图像可看plt.subplot(121), plt.imshow(img, cmap='gray')
plt.title('Input Image'), plt.xticks([]), plt.yticks([])
plt.subplot(122), plt.imshow(img_back, cmap='gray')
plt.title('Result'), plt.xticks([]), plt.yticks([])plt.show()

思想:将图像通过傅里叶变换映射到频域中进行操作,往往简单高效,最后再逆变换转化回来就好
这篇关于python数字图像处理基础(七)——直方图均衡化、傅里叶变换的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




