本文主要是介绍R2机器人加载棋盘与棋子模型,对urdf、sdf的解释(区分srdf),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1、概述
urdf、sdf、srdf文件都属于xml的规范格式,解释分别如下:
urdf(unified robot description format)叫做"统一机器人描述格式",主要目的就是提供一种尽可能通用的机器人描述规范,这样对于机器人的描述就可以互相移植,比较方便。
sdf(simulation description format)能够描述机器人、静态和动态物体、照明、地形甚至物理学的各方面的信息。sdf可以精确描述机器人的各类性质,除了传统的运动学特性之外,还可以为机器人定义传感器、表面属性、纹理、关节摩擦等,还提供了定义各种环境的方法,包括环境光照、地形,OpenStreetMaps中的街道以及The Prop Shop中提供的任何模型
从仿真角度讲,urdf文档不能描述不属于机器人的属性,即使其可能与机器人仿真十分相关,如环境光线、机器人在世界坐标系下的位姿、多个机器人之间的相对位姿等,算是对urdf的补充升级。
srdf(semantic robot description format)叫做"语义机器人描述格式",是MoveIt针对控制机器人关节运动使用的一种机器人描述文件格式。有兴趣的可以查阅:ROS仿真R2机器人之安装运行及MoveIt的介绍
使用命令:
rosrun moveit_setup_assistant moveit_setup_assistant就可以打开MoveIt辅助安装工具,其中就有加载和生成srdf文件的操作。主要内容包括,关节组(joint groups),默认状态配置(default robot configurations),额外的碰撞检测信息(additional collision checking information),额外的坐标系变换(additional transforms)等
我们重点来讲解下urdf对机器人的描述格式文件,连杆是带有质量属性的刚体,也就是不能发生形变,比如手臂,而关节是连接、限制两个刚体相对运动的结构,可以旋转,比如人的腕关节。关节也叫运动副。通过关节将连杆依次连接起来,就构成了一个个运动链,主要包括如下内容:
机器人模型的运动学与动力学描述
机器人的几何表示
机器人的碰撞模型
2、urdf示例
比如一个简单的描述如下:
<?xml version="1.0"?>
<robot name="mybot"> <link name="base_link"> <visual> <geometry> <cylinder length="0.8" radius="0.1"/> </geometry> </visual> </link>
</robot>那么这个机器人的名称叫mybot,link属性就是连杆的意思,所以是一根名为base_link的连杆,visual是可视化节点,geometry是几何学,对机器人关节的描述,这里就是该连杆的形状是cylinder圆柱体,其长度为0.8、横截面半径为0.1。
单位制度采用的是"米-千克-秒",所以上面的长度和半径的大小是0.8米和0.1米。
上面的示例是一个连杆,再来看一个带关节的连接两个连杆的机器人:
<?xml version="1.0"?>
<robot name="mybot2"><link name="link_0"><visual><geometry><cylinder length="0.8" radius="0.1"/></geometry></visual></link><link name="link_1"><visual><geometry><cylinder length="0.8" radius="0.1"/></geometry></visual></link><joint name="joint_0" type="revolute"><axis xyz="0 0 1"/><limit effort="100.0" lower="0.0" upper="0.5" velocity="0.5"/><origin rpy="0 0 0" xyz="0.0 0.0 0.3"/><parent link="link_0"/><child link="link_1"/></joint>
</robot>这里可以看到增加了一个名为joint_0的关节,类型是revolute,也就是说是可以旋转的。定义中我们知道是用来连接两个连杆的,可以叫做父连杆和子连杆,这里的父连杆是名为link_0,子连杆是名为link_1。
其中类型除了revolute之外还包括以下几种:
continuous:旋转,不受限制
revolute:旋转,转动角度受到限制
prismatic:平滑的
fixed: 固定关节
floating: 浮动关节,允许六个自由度的运动
3、棋盘与棋子
接下来我们看下sdf在实际当中的应用,我们在仿真平台中看下如何给下棋机器人画一个棋盘和棋子。下面一些代码是沿着上一篇文章的一些代码,是针对机器人的一些操作,有兴趣的可以一起看过来
3.1、bash操作
cd ~/chessbot/src
gedit r2_cli.py#!/usr/bin/env python
import sys,rospy,tf,moveit_commander,random
from geometry_msgs.msg import Pose,Point,Quaternionclass R2Wrapper:def __init__(self):self.group={'left':moveit_commander.MoveGroupCommander('left_arm'),'right':moveit_commander.MoveGroupCommander('right_arm')}def setPose(self,arm,x,y,z,phi,theta,psi):if arm!='left' and arm!='right':raise ValueError("unknow arm:'%s'"%arm)orient=Quaternion(*tf.transformations.quaternion_from_euler(phi,theta,psi))pose=Pose(Point(x,y,z),orient)self.group[arm].set_pose_target(pose)self.group[arm].go(True)if __name__=='__main__':moveit_commander.roscpp_initialize(sys.argv)rospy.init_node('r2_cli',anonymous=True)argv=rospy.myargv(argv=sys.argv)if len(argv)!=8:print('usage:r2_cli.py arm x y z phi theta psi')sys.exit(1)r2w=R2Wrapper()r2w.setPose(argv[1],*[float(num) for num in sys.argv[2:]])moveit_commander.roscpp_shutdown()chmod u+x r2_cli.py
./r2_cli.py left 0.5 -0.5 1.3 3.14 -1.5 -1.57
./r2_cli.py right -0.4 -0.6 1.4 3.14 -1.5 -1.57
./r2_cli.py left 0.4 -0.4 1.2 3.14 -1.5 -1.57这里是对机器人做一些移动操作,也可以将这些命令写入到bash文件中,r2.bash
#!/bin/bash
alias r2lhome="./r2_cli.py left 0.5 -0.5 1.3 3.14 -1.5 -1.57"
alias r2rhome="./r2_cli.py right -0.4 -0.6 1.4 3.14 -1.5 -1.57"
alias r2home="r2lhome;r2rhome"然后通过source ./r2.bash 加载这些别名即可,这样就只需要输入 r2home,机器人就会规划一条通向起始位置的安全路径,并沿着它平滑地移动过去。对大多数机器人来说,一般都会设置一些常用的姿势,这样在日常操作、维护和任务当中都非常的实用方便。
启动一个空白的gazebo仿真界面
cd ~/chessbot
source devel/setup.bash
roslaunch gazebo_ros empty_world.launch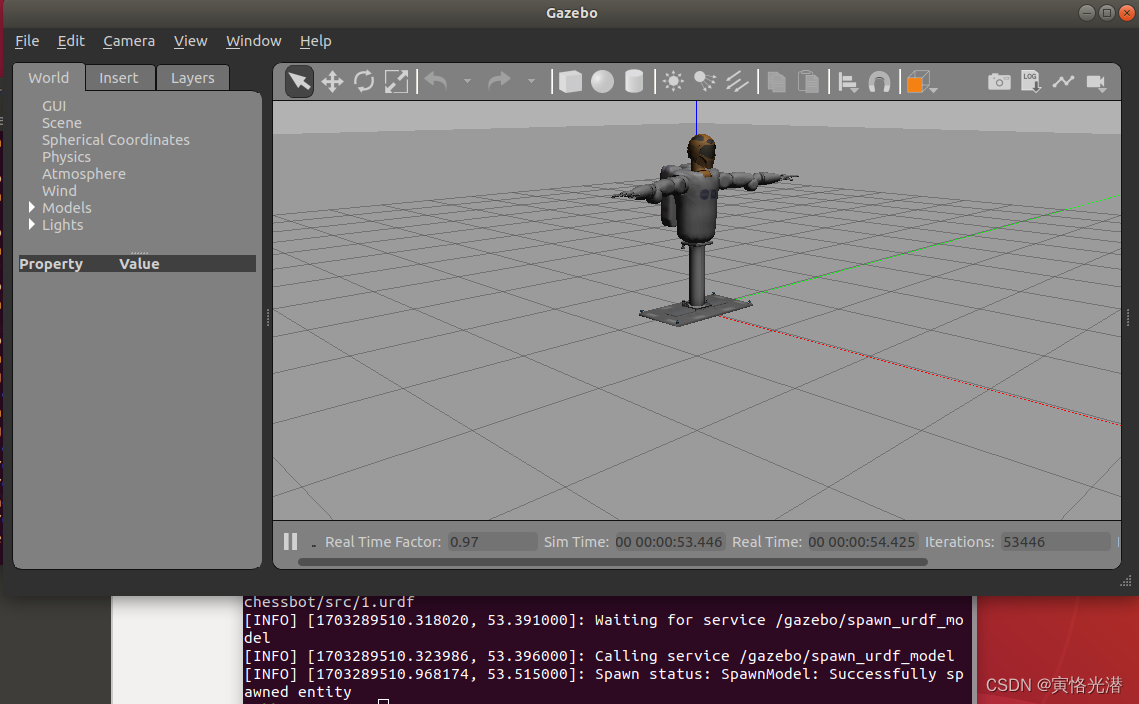 然后将R2机器人给加载进来
然后将R2机器人给加载进来
cd ~/chessbot
source devel/setup.bash
rosrun gazebo_ros spawn_model -file ~/chessbot/src/1.urdf -urdf -model r2接下来可以规划它运动了
cd ~/chessbot
source devel/setup.bash
roslaunch mybot move_group.launchcd ~/chessbot
source devel/setup.bash
cd ~/chessbot/src
source ./r2.bash
r2home3.2、画棋盘
gedit chess_board.sdf<?xml version='1.0'?>
<sdf version='1.4'>
<model name='box'>
<!--<pose frame=''>1 0 2 0 0 0</pose>--><static>true</static><link name='link'><collision name='collision'><geometry><box><size>0.5 0.5 0.02</size></box></geometry><surface><friction><ode><mu>0.1</mu><mu2>0.1</mu2></ode></friction><contact><ode><max_vel>0.1</max_vel><min_depth>0.001</min_depth></ode></contact></surface></collision><visual name='visual'><geometry><box><size>0.5 0.5 0.02</size></box></geometry></visual></link>
</model>
</sdf>加载进来看下:
rosrun gazebo_ros spawn_model -file ~/chessbot/src/chess_board.sdf -sdf -model box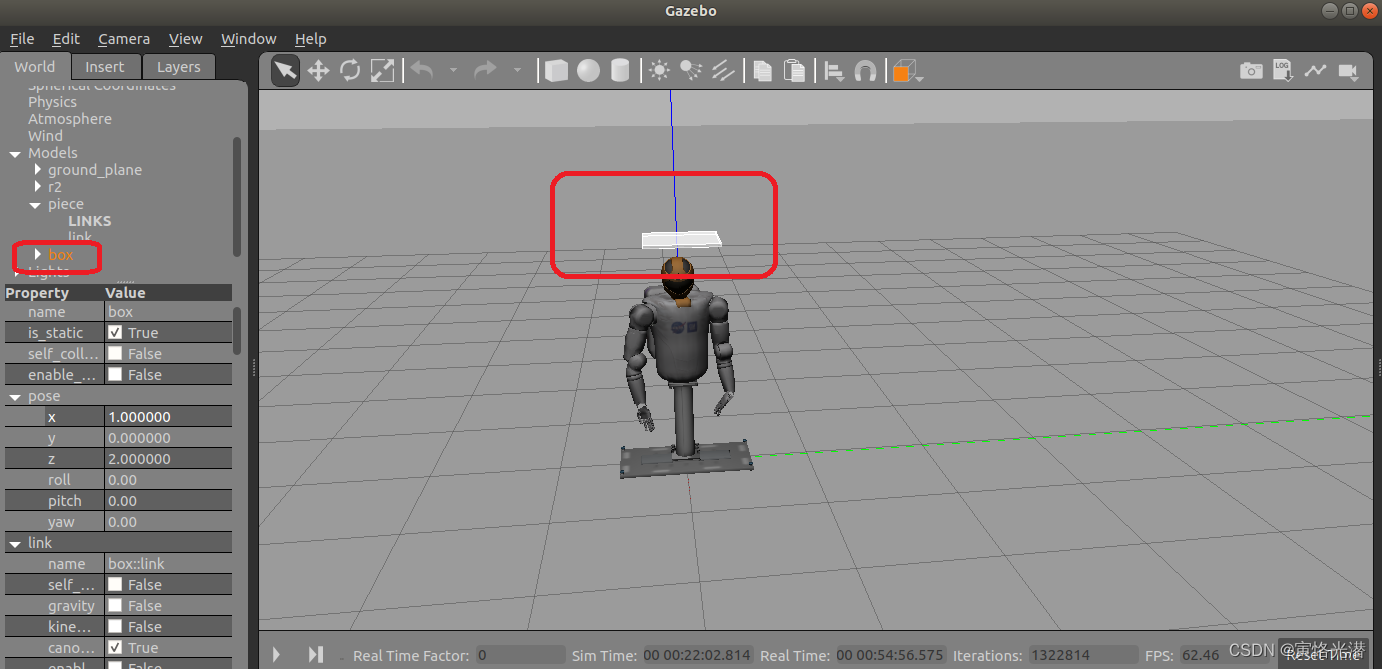
这里就是在sdf节点下,最常见的就是model节点,可以进行嵌套,这样就可以插入多个机器人了。可以看到节点属性比urdf多了,这也是其中一部分的节点,其余的还有light灯光效果,gravity重力加速度,scene场景参数,比如背景、阴影等,kinematic运动学等等。
其中static表示这个东西是静态的不能移动,pose可以自定义位姿,geometry里面定义物体的大小(长宽高),collision碰撞检测里面包括了常见的物理特性,friction摩擦力,里面定义两个摩擦系数,contact节点里面的max_vel表示接触的最大速度,min_depth表示接触的最小深度
3.3、画棋子
gedit chess_piece.sdf<?xml version='1.0'?>
<sdf version='1.4'>
<model name='piece'><link name='link'><inertial><mass>0.001</mass><inertial><ixx>0.0000001667</ixx><ixy>0</ixy><ixz>0</ixz><iyy>0.00000001667</iyy><izz>0.0000001667</izz></inertial></inertial><collision name='collision'><geometry><box><size>0.02 0.02 0.04</size></box></geometry><surface><friction><ode><mu>0.4</mu><mu2>0.4</mu2></ode></friction><contact><ode><max_vel>0.1</max_vel><min_depth>0.0001</min_depth></ode></contact></surface></collision><visual name='visual'><geometry><box><size>0.02 0.02 0.04</size></box></geometry></visual></link>
</model>
</sdf>这里定义了棋子的质量mass为0.001,也就是1克,有一个惯性节点inertial,定义了物体的惯性矩阵,ixx, iyy, izz表示三个方向上的惯性,而ixy, ixz, iyz表示扭矩作用下的惯性力矩。
棋子比较多,我们使用代码循环生成棋子,落在棋盘上,这里会使用到服务,所以我们可以先来查看下有哪些服务列表:rosservice list,挺多的,如下图:

其中我们需要用到/gazebo/delete_model和/gazebo/spawn_sdf_model
gedit spawn_chessboard.py #!/usr/bin/env python
import sys,rospy,tf
from gazebo_msgs.srv import *
from geometry_msgs.msg import *
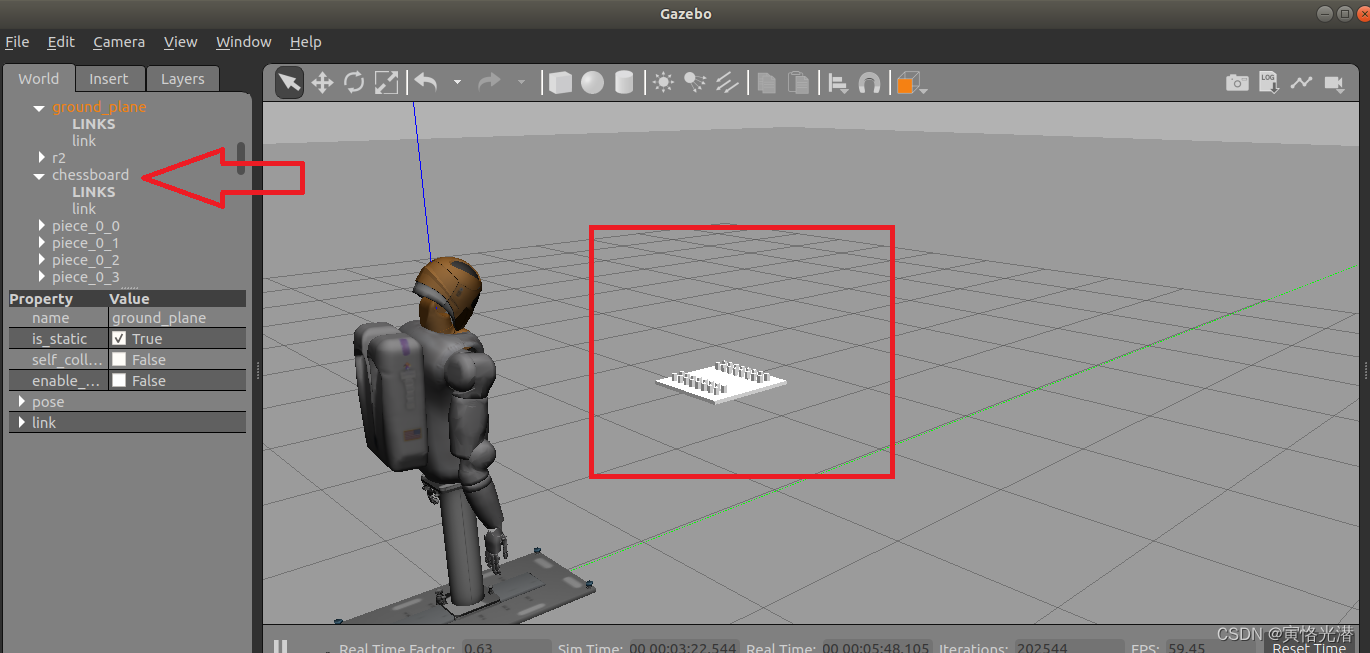
from copy import deepcopyif __name__=='__main__':rospy.init_node("spawn_chessboard")rospy.wait_for_service("gazebo/delete_model")rospy.wait_for_service("gazebo/spawn_sdf_model")delete_model=rospy.ServiceProxy("gazebo/delete_model",DeleteModel)delete_model("chessboard")s=rospy.ServiceProxy("gazebo/spawn_sdf_model",SpawnModel)orient=Quaternion(*tf.transformations.quaternion_from_euler(0,0,0))board_pose=Pose(Point(0.25,1.39,0.90),orient)unit=0.05with open("chess_board.sdf",'r') as f:board_xml=f.read()with open("chess_piece.sdf",'r') as f:piece_xml=f.read()print(s("chessboard",board_xml,"",board_pose,"world"))for row in [0,1,6,7]:for col in xrange(0,8):piece_name="piece_%d_%d"%(row,col)delete_model(piece_name)pose=deepcopy(board_pose)pose.position.x=board_pose.position.x-3.5*unit+col*unitpose.position.y=board_pose.position.y-3.5*unit+row*unitpose.position.z+=0.02s(piece_name,piece_xml,"",pose,"world")这样就相当于先定位一个棋盘,然后就在棋盘中的对应位置,一个一个的画出棋子了。
加个可执行权限:chmod u+x spawn_chessboard.py
然后执行这个Python文件:./spawn_chessboard.p
success: True
status_message: "SpawnModel: Successfully spawned entity"
这篇关于R2机器人加载棋盘与棋子模型,对urdf、sdf的解释(区分srdf)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





