本文主要是介绍ROS-urdf集成gazebo,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 一、URDF与Gazebo基本集成流程
- 二、URDF集成Gazebo相关设置
- 三、URDF集成Gazebo实操
- 四、Gazebo仿真环境搭建
一、URDF与Gazebo基本集成流程
1.创建功能包
创建新功能包,导入依赖包: urdf、xacro、gazebo_ros、gazebo_ros_control、gazebo_plugins
2.编写URDF文件
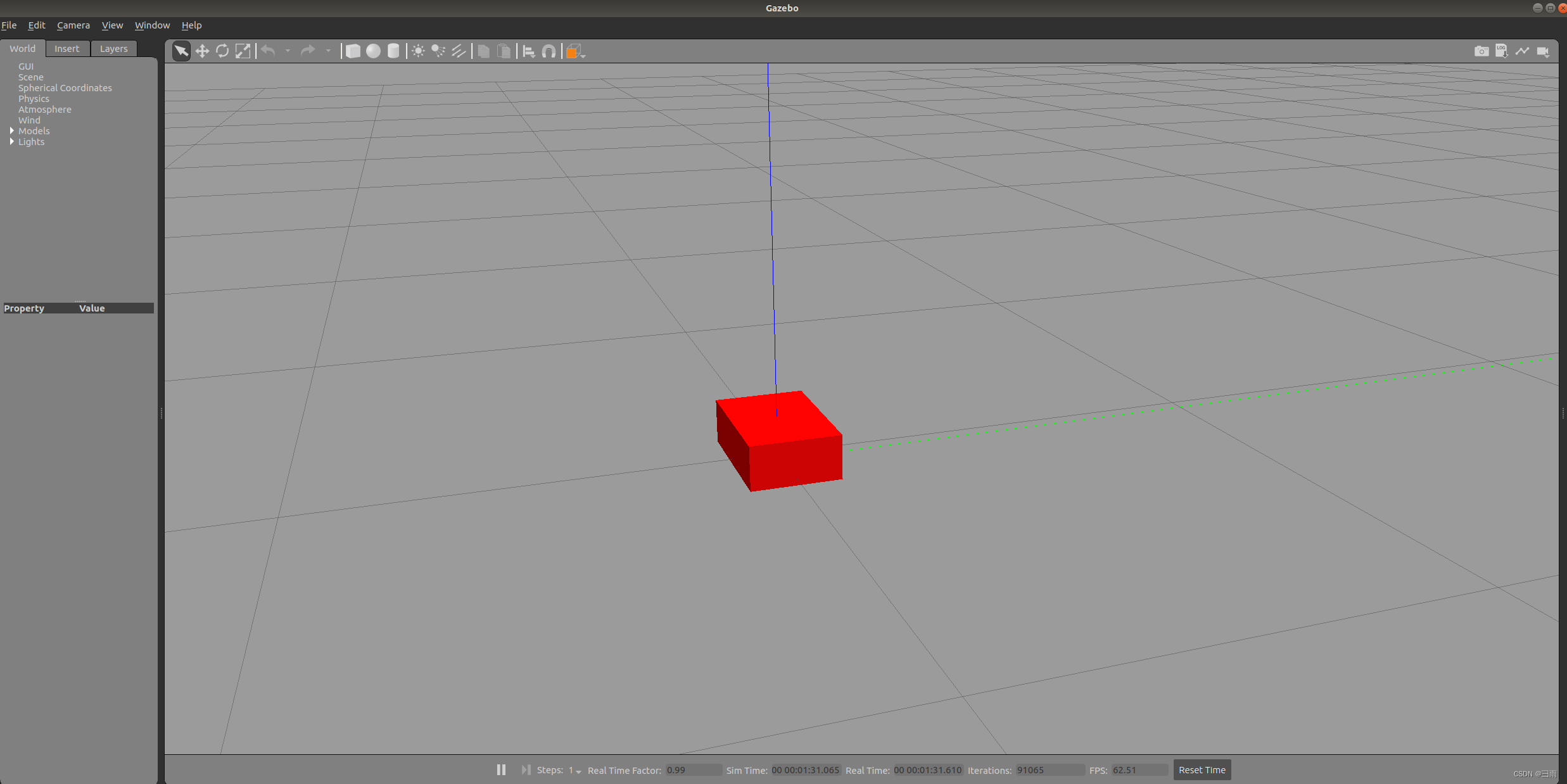
<!-- 创建一个机器人模型(盒状即可),显示在 Gazebo 中
--><robot name="mycar"><link name="base_link"><visual><geometry><box size="0.5 0.2 0.1" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /><material name="yellow"><color rgba="0.5 0.3 0.0 1" /></material></visual><collision><geometry><box size="0.5 0.2 0.1" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /></collision><inertial><origin xyz="0 0 0" /><mass value="6" /><inertia ixx="1" ixy="0" ixz="0" iyy="1" iyz="0" izz="1" /></inertial></link><gazebo reference="base_link"><material>Gazebo/Black</material></gazebo></robot>
注意, 当 URDF 需要与 Gazebo 集成时,和 Rviz 有明显区别:
1.必须使用 collision 标签,因为既然是仿真环境,那么必然涉及到碰撞检测,collision 提供碰撞检测的依据。
2.必须使用 inertial 标签,此标签标注了当前机器人某个刚体部分的惯性矩阵,用于一些力学相关的仿真计算。
3.颜色设置,也需要重新使用 gazebo 标签标注,因为之前的颜色设置为了方便调试包含透明度,仿真环境下没有此选项。
3.启动Gazebo并显示模型
launch 文件实现:
<launch><!-- 将 Urdf 文件的内容加载到参数服务器 --><param name="robot_description" textfile="$(find demo02_urdf_gazebo)/urdf/urdf01_helloworld.urdf" /><!-- 启动 gazebo环境,当前环境为空环境 --><include file="$(find gazebo_ros)/launch/empty_world.launch" /><!-- 在 Gazebo 中加载一个机器人模型,该功能由 gazebo_ros 下的 spawn_model 提供:-urdf 加载的是 urdf 文件-model mycar 模型名称是 mycar-param robot_description 从参数 robot_description 中载入模型-x 模型载入的 x 坐标-y 模型载入的 y 坐标-z 模型载入的 z 坐标--><node pkg="gazebo_ros" type="spawn_model" name="model" args="-urdf -model mycar -param robot_description" />
</launch>
二、URDF集成Gazebo相关设置
1.collision
如果机器人link是标准的几何体形状,和link的 visual 属性设置一致即可。
2.inertial
惯性矩阵的设置需要结合link的质量与外形参数动态生成,标准的球体、圆柱与立方体的惯性矩阵公式如下(已经封装为 xacro 实现):
球体惯性矩阵
<!-- Macro for inertia matrix --><xacro:macro name="sphere_inertial_matrix" params="m r"><inertial><mass value="${m}" /><inertia ixx="${2*m*r*r/5}" ixy="0" ixz="0"iyy="${2*m*r*r/5}" iyz="0" izz="${2*m*r*r/5}" /></inertial></xacro:macro>
圆柱惯性矩阵
<xacro:macro name="cylinder_inertial_matrix" params="m r h"><inertial><mass value="${m}" /><inertia ixx="${m*(3*r*r+h*h)/12}" ixy = "0" ixz = "0"iyy="${m*(3*r*r+h*h)/12}" iyz = "0"izz="${m*r*r/2}" /> </inertial></xacro:macro>
立方体惯性矩阵
<xacro:macro name="Box_inertial_matrix" params="m l w h"><inertial><mass value="${m}" /><inertia ixx="${m*(h*h + l*l)/12}" ixy = "0" ixz = "0"iyy="${m*(w*w + l*l)/12}" iyz= "0"izz="${m*(w*w + h*h)/12}" /></inertial></xacro:macro>
需要注意的是,原则上,除了 base_footprint 外,机器人的每个刚体部分都需要设置惯性矩阵,且惯性矩阵必须经计算得出,如果随意定义刚体部分的惯性矩阵,那么可能会导致机器人在 Gazebo 中出现抖动,移动等现象。
3.颜色设置
在 gazebo 中显示 link 的颜色,必须要使用指定的标签:
<gazebo reference="link节点名称"><material>Gazebo/Blue</material>
</gazebo>
- material 标签中,设置的值区分大小写,颜色可以设置为 Red Blue Green Black …
- 该标签与link标签同级,不要写在link标签中。
三、URDF集成Gazebo实操
1.编写封装惯性矩阵算法的 xacro 文件
<robot name="base" xmlns:xacro="http://wiki.ros.org/xacro"><!-- Macro for inertia matrix --><xacro:macro name="sphere_inertial_matrix" params="m r"><inertial><mass value="${m}" /><inertia ixx="${2*m*r*r/5}" ixy="0" ixz="0"iyy="${2*m*r*r/5}" iyz="0" izz="${2*m*r*r/5}" /></inertial></xacro:macro><xacro:macro name="cylinder_inertial_matrix" params="m r h"><inertial><mass value="${m}" /><inertia ixx="${m*(3*r*r+h*h)/12}" ixy = "0" ixz = "0"iyy="${m*(3*r*r+h*h)/12}" iyz = "0"izz="${m*r*r/2}" /> </inertial></xacro:macro><xacro:macro name="Box_inertial_matrix" params="m l w h"><inertial><mass value="${m}" /><inertia ixx="${m*(h*h + l*l)/12}" ixy = "0" ixz = "0"iyy="${m*(w*w + l*l)/12}" iyz= "0"izz="${m*(w*w + h*h)/12}" /></inertial></xacro:macro>
</robot>
2.复制相关 xacro 文件,并设置 collision inertial 以及 color 等参数
A.底盘 Xacro 文件
<!--使用 xacro 优化 URDF 版的小车底盘实现:实现思路:1.将一些常量、变量封装为 xacro:property比如:PI 值、小车底盘半径、离地间距、车轮半径、宽度 ....2.使用 宏 封装驱动轮以及支撑轮实现,调用相关宏生成驱动轮与支撑轮-->
<!-- 根标签,必须声明 xmlns:xacro -->
<robot name="my_base" xmlns:xacro="http://www.ros.org/wiki/xacro"><!-- 封装变量、常量 --><!-- PI 值设置精度需要高一些,否则后续车轮翻转量计算时,可能会出现肉眼不能察觉的车轮倾斜,从而导致模型抖动 --><xacro:property name="PI" value="3.1415926"/><!-- 宏:黑色设置 --><material name="black"><color rgba="0.0 0.0 0.0 1.0" /></material><!-- 底盘属性 --><xacro:property name="base_footprint_radius" value="0.001" /> <!-- base_footprint 半径 --><xacro:property name="base_link_radius" value="0.1" /> <!-- base_link 半径 --><xacro:property name="base_link_length" value="0.08" /> <!-- base_link 长 --><xacro:property name="earth_space" value="0.015" /> <!-- 离地间距 --><xacro:property name="base_link_m" value="0.5" /> <!-- 质量 --><!-- 底盘 --><link name="base_footprint"><visual><geometry><sphere radius="${base_footprint_radius}" /></geometry></visual></link><link name="base_link"><visual><geometry><cylinder radius="${base_link_radius}" length="${base_link_length}" /></geometry><origin xyz="0 0 0" rpy="0 0 0" /><material name="yellow"><color rgba="0.5 0.3 0.0 0.5" /></material></visual><collision><geometry><cylinder radius="${base_link_radius}" length="${base_link_length}" /></geometry><origin xyz="0 0 0" rpy="0 0 0" /></collision><xacro:cylinder_inertial_matrix m="${base_link_m}" r="${base_link_radius}" h="${base_link_length}" /></link><joint name="base_link2base_footprint" type="fixed"><parent link="base_footprint" /><child link="base_link" /><origin xyz="0 0 ${earth_space + base_link_length / 2 }" /></joint><gazebo reference="base_link"><material>Gazebo/Yellow</material></gazebo><!-- 驱动轮 --><!-- 驱动轮属性 --><xacro:property name="wheel_radius" value="0.0325" /><!-- 半径 --><xacro:property name="wheel_length" value="0.015" /><!-- 宽度 --><xacro:property name="wheel_m" value="0.05" /> <!-- 质量 --><!-- 驱动轮宏实现 --><xacro:macro name="add_wheels" params="name flag"><link name="${name}_wheel"><visual><geometry><cylinder radius="${wheel_radius}" length="${wheel_length}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="${PI / 2} 0.0 0.0" /><material name="black" /></visual><collision><geometry><cylinder radius="${wheel_radius}" length="${wheel_length}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="${PI / 2} 0.0 0.0" /></collision><xacro:cylinder_inertial_matrix m="${wheel_m}" r="${wheel_radius}" h="${wheel_length}" /></link><joint name="${name}_wheel2base_link" type="continuous"><parent link="base_link" /><child link="${name}_wheel" /><origin xyz="0 ${flag * base_link_radius} ${-(earth_space + base_link_length / 2 - wheel_radius) }" /><axis xyz="0 1 0" /></joint><gazebo reference="${name}_wheel"><material>Gazebo/Red</material></gazebo></xacro:macro><xacro:add_wheels name="left" flag="1" /><xacro:add_wheels name="right" flag="-1" /><!-- 支撑轮 --><!-- 支撑轮属性 --><xacro:property name="support_wheel_radius" value="0.0075" /> <!-- 支撑轮半径 --><xacro:property name="support_wheel_m" value="0.03" /> <!-- 质量 --><!-- 支撑轮宏 --><xacro:macro name="add_support_wheel" params="name flag" ><link name="${name}_wheel"><visual><geometry><sphere radius="${support_wheel_radius}" /></geometry><origin xyz="0 0 0" rpy="0 0 0" /><material name="black" /></visual><collision><geometry><sphere radius="${support_wheel_radius}" /></geometry><origin xyz="0 0 0" rpy="0 0 0" /></collision><xacro:sphere_inertial_matrix m="${support_wheel_m}" r="${support_wheel_radius}" /></link><joint name="${name}_wheel2base_link" type="continuous"><parent link="base_link" /><child link="${name}_wheel" /><origin xyz="${flag * (base_link_radius - support_wheel_radius)} 0 ${-(base_link_length / 2 + earth_space / 2)}" /><axis xyz="1 1 1" /></joint><gazebo reference="${name}_wheel"><material>Gazebo/Red</material></gazebo></xacro:macro><xacro:add_support_wheel name="front" flag="1" /><xacro:add_support_wheel name="back" flag="-1" /></robot>
注意: 如果机器人模型在 Gazebo 中产生了抖动,滑动,缓慢位移 … 诸如此类情况,请查看
- 惯性矩阵是否设置了,且设置是否正确合理
- 车轮翻转需要依赖于 PI 值,如果 PI 值精度偏低,也可能导致上述情况产生
B.摄像头 Xacro 文件
<!-- 摄像头相关的 xacro 文件 -->
<robot name="my_camera" xmlns:xacro="http://wiki.ros.org/xacro"><!-- 摄像头属性 --><xacro:property name="camera_length" value="0.01" /> <!-- 摄像头长度(x) --><xacro:property name="camera_width" value="0.025" /> <!-- 摄像头宽度(y) --><xacro:property name="camera_height" value="0.025" /> <!-- 摄像头高度(z) --><xacro:property name="camera_x" value="0.08" /> <!-- 摄像头安装的x坐标 --><xacro:property name="camera_y" value="0.0" /> <!-- 摄像头安装的y坐标 --><xacro:property name="camera_z" value="${base_link_length / 2 + camera_height / 2}" /> <!-- 摄像头安装的z坐标:底盘高度 / 2 + 摄像头高度 / 2 --><xacro:property name="camera_m" value="0.01" /> <!-- 摄像头质量 --><!-- 摄像头关节以及link --><link name="camera"><visual><geometry><box size="${camera_length} ${camera_width} ${camera_height}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /><material name="black" /></visual><collision><geometry><box size="${camera_length} ${camera_width} ${camera_height}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /></collision><xacro:Box_inertial_matrix m="${camera_m}" l="${camera_length}" w="${camera_width}" h="${camera_height}" /></link><joint name="camera2base_link" type="fixed"><parent link="base_link" /><child link="camera" /><origin xyz="${camera_x} ${camera_y} ${camera_z}" /></joint><gazebo reference="camera"><material>Gazebo/Blue</material></gazebo>
</robot>
C.雷达 Xacro 文件
<!--小车底盘添加雷达
-->
<robot name="my_laser" xmlns:xacro="http://wiki.ros.org/xacro"><!-- 雷达支架 --><xacro:property name="support_length" value="0.15" /> <!-- 支架长度 --><xacro:property name="support_radius" value="0.01" /> <!-- 支架半径 --><xacro:property name="support_x" value="0.0" /> <!-- 支架安装的x坐标 --><xacro:property name="support_y" value="0.0" /> <!-- 支架安装的y坐标 --><xacro:property name="support_z" value="${base_link_length / 2 + support_length / 2}" /> <!-- 支架安装的z坐标:底盘高度 / 2 + 支架高度 / 2 --><xacro:property name="support_m" value="0.02" /> <!-- 支架质量 --><link name="support"><visual><geometry><cylinder radius="${support_radius}" length="${support_length}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /><material name="red"><color rgba="0.8 0.2 0.0 0.8" /></material></visual><collision><geometry><cylinder radius="${support_radius}" length="${support_length}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /></collision><xacro:cylinder_inertial_matrix m="${support_m}" r="${support_radius}" h="${support_length}" /></link><joint name="support2base_link" type="fixed"><parent link="base_link" /><child link="support" /><origin xyz="${support_x} ${support_y} ${support_z}" /></joint><gazebo reference="support"><material>Gazebo/White</material></gazebo><!-- 雷达属性 --><xacro:property name="laser_length" value="0.05" /> <!-- 雷达长度 --><xacro:property name="laser_radius" value="0.03" /> <!-- 雷达半径 --><xacro:property name="laser_x" value="0.0" /> <!-- 雷达安装的x坐标 --><xacro:property name="laser_y" value="0.0" /> <!-- 雷达安装的y坐标 --><xacro:property name="laser_z" value="${support_length / 2 + laser_length / 2}" /> <!-- 雷达安装的z坐标:支架高度 / 2 + 雷达高度 / 2 --><xacro:property name="laser_m" value="0.1" /> <!-- 雷达质量 --><!-- 雷达关节以及link --><link name="laser"><visual><geometry><cylinder radius="${laser_radius}" length="${laser_length}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /><material name="black" /></visual><collision><geometry><cylinder radius="${laser_radius}" length="${laser_length}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /></collision><xacro:cylinder_inertial_matrix m="${laser_m}" r="${laser_radius}" h="${laser_length}" /></link><joint name="laser2support" type="fixed"><parent link="support" /><child link="laser" /><origin xyz="${laser_x} ${laser_y} ${laser_z}" /></joint><gazebo reference="laser"><material>Gazebo/Black</material></gazebo>
</robot>
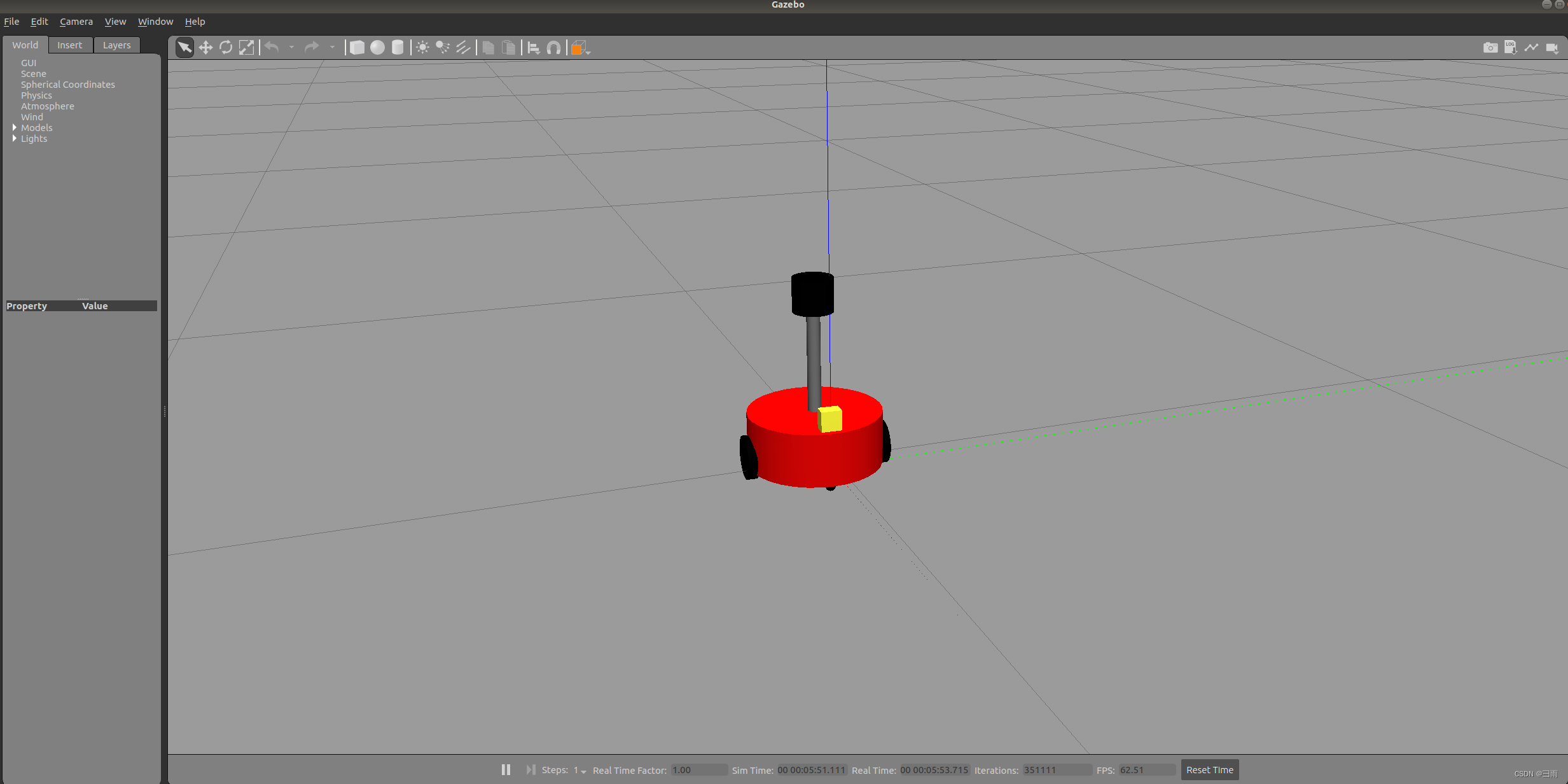
D.组合底盘、摄像头与雷达的 Xacro 文件
3.在 gazebo 中执行
launch 文件:
<launch><!-- 将 Urdf 文件的内容加载到参数服务器 --><param name="robot_description" command="$(find xacro)/xacro $(find demo02_urdf_gazebo)/urdf/xacro/my_base_camera_laser.urdf.xacro" /><!-- 启动 gazebo --><include file="$(find gazebo_ros)/launch/empty_world.launch" /><!-- 在 gazebo 中显示机器人模型 --><node pkg="gazebo_ros" type="spawn_model" name="model" args="-urdf -model mycar -param robot_description" />
</launch>
四、Gazebo仿真环境搭建
Gazebo 中创建仿真实现方式有两种:
-
方式1: 直接添加内置组件创建仿真环境
-
方式2: 手动绘制仿真环境(更为灵活)
也还可以直接下载使用官方或第三方提高的仿真环境插件。
1.添加内置组件创建仿真环境
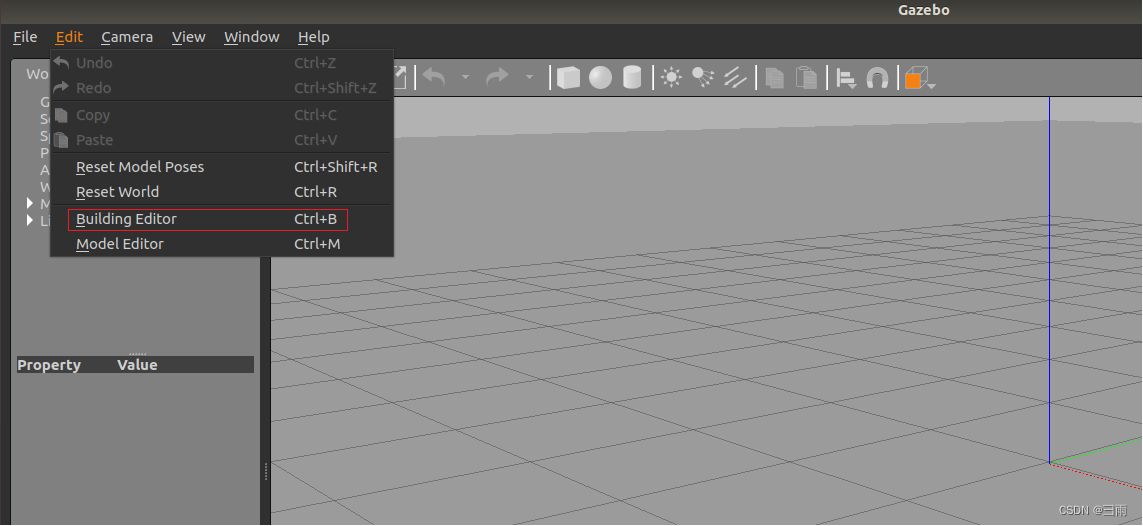
1.1启动 Gazebo 并添加组件
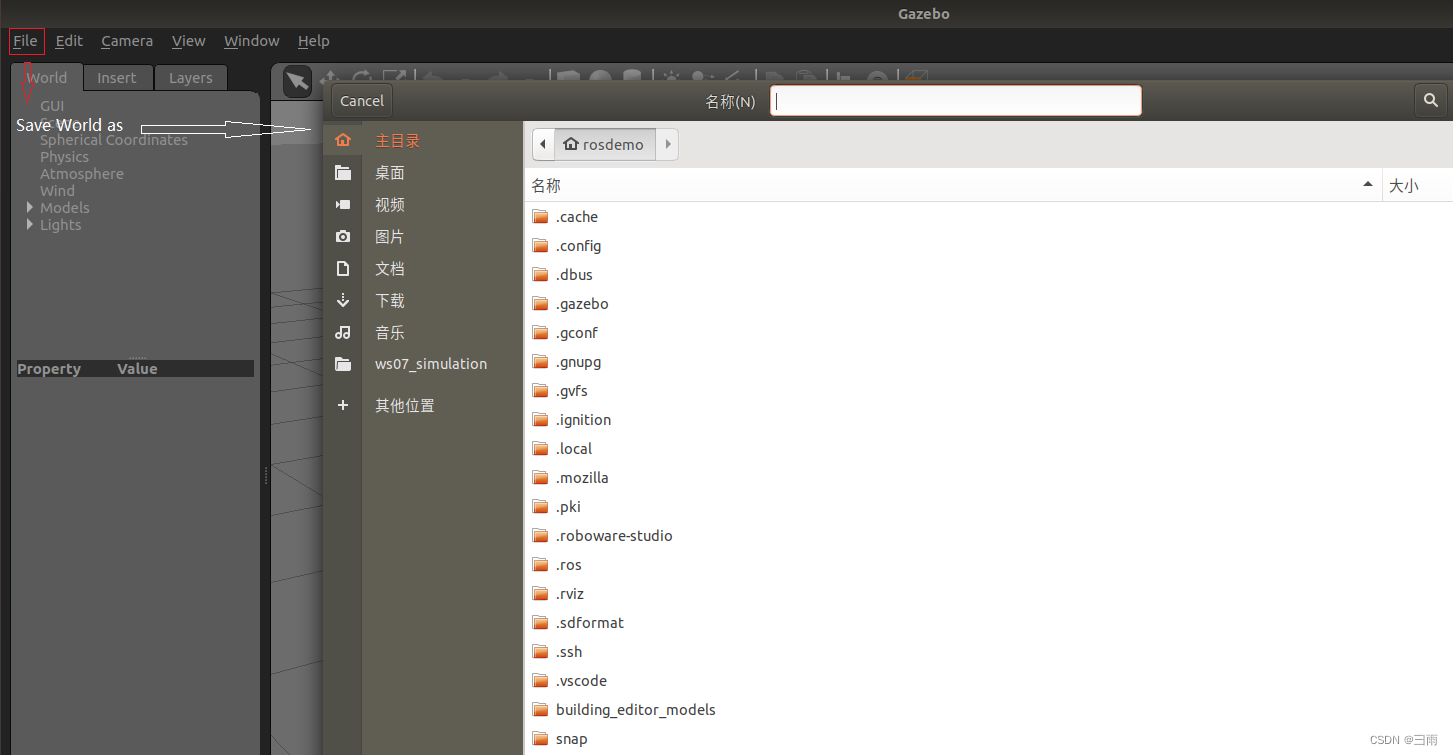
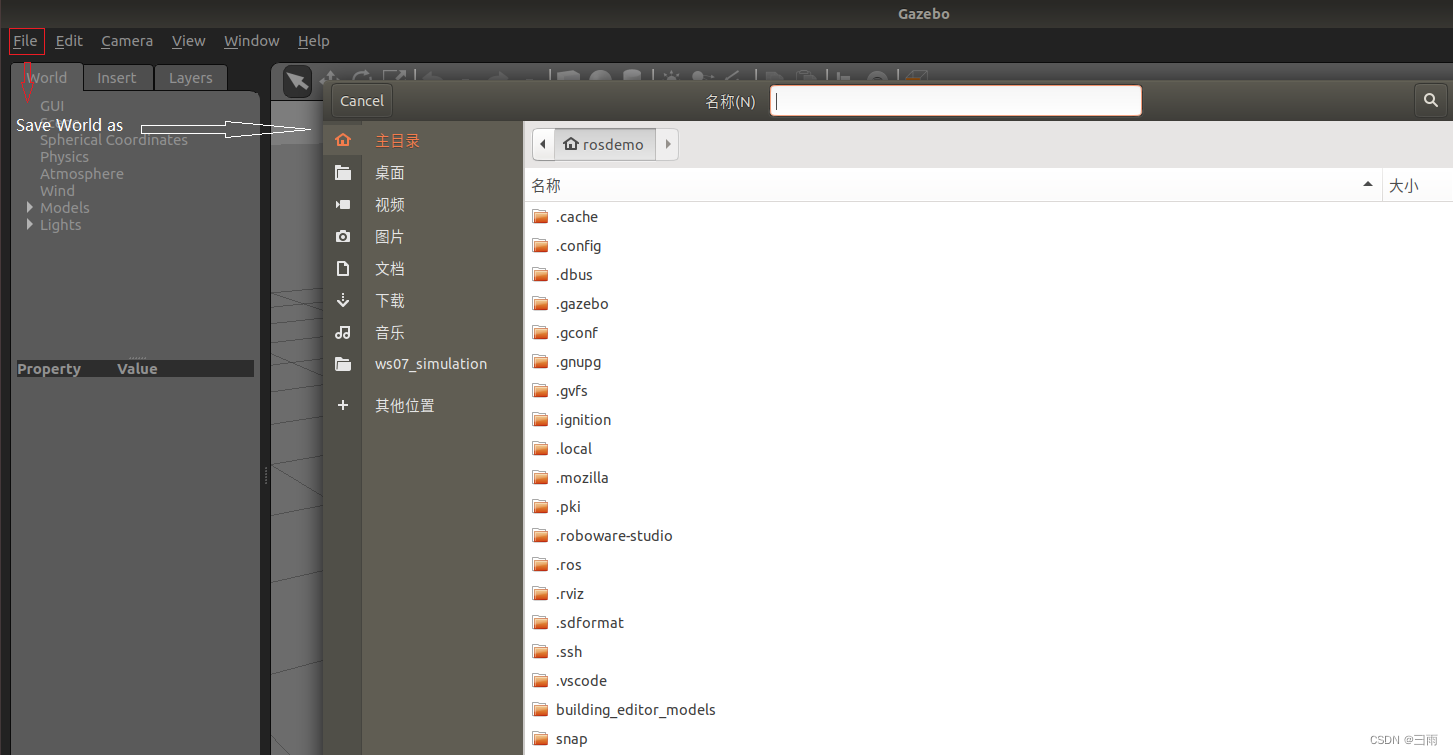
1.2保存仿真环境
添加完毕后,选择 file —> Save World as 选择保存路径(功能包下: worlds 目录),文件名自定义,后缀名设置为 .world
1.3 启动
<launch><!-- 将 Urdf 文件的内容加载到参数服务器 --><param name="robot_description" command="$(find xacro)/xacro $(find demo02_urdf_gazebo)/urdf/xacro/my_base_camera_laser.urdf.xacro" /><!-- 启动 gazebo --><include file="$(find gazebo_ros)/launch/empty_world.launch"><arg name="world_name" value="$(find demo02_urdf_gazebo)/worlds/hello.world" /></include><!-- 在 gazebo 中显示机器人模型 --><node pkg="gazebo_ros" type="spawn_model" name="model" args="-urdf -model mycar -param robot_description" />
</launch>
2.自定义仿真环境
2.1 启动 gazebo 打开构建面板,绘制仿真环境
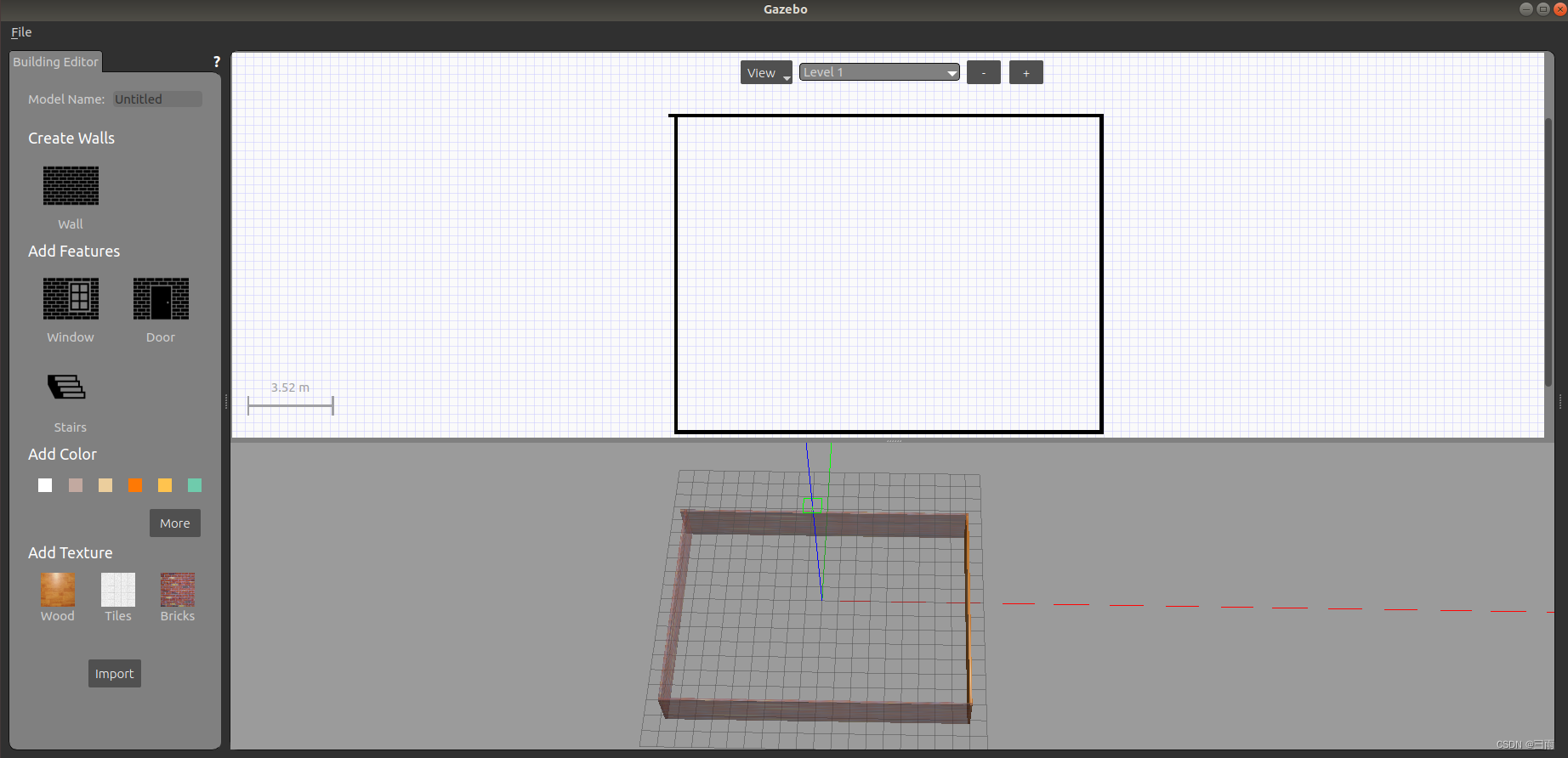
2.2 保存构建的环境
点击: 左上角 file —> Save (保存路径功能包下的: models)
然后 file —> Exit Building Editor
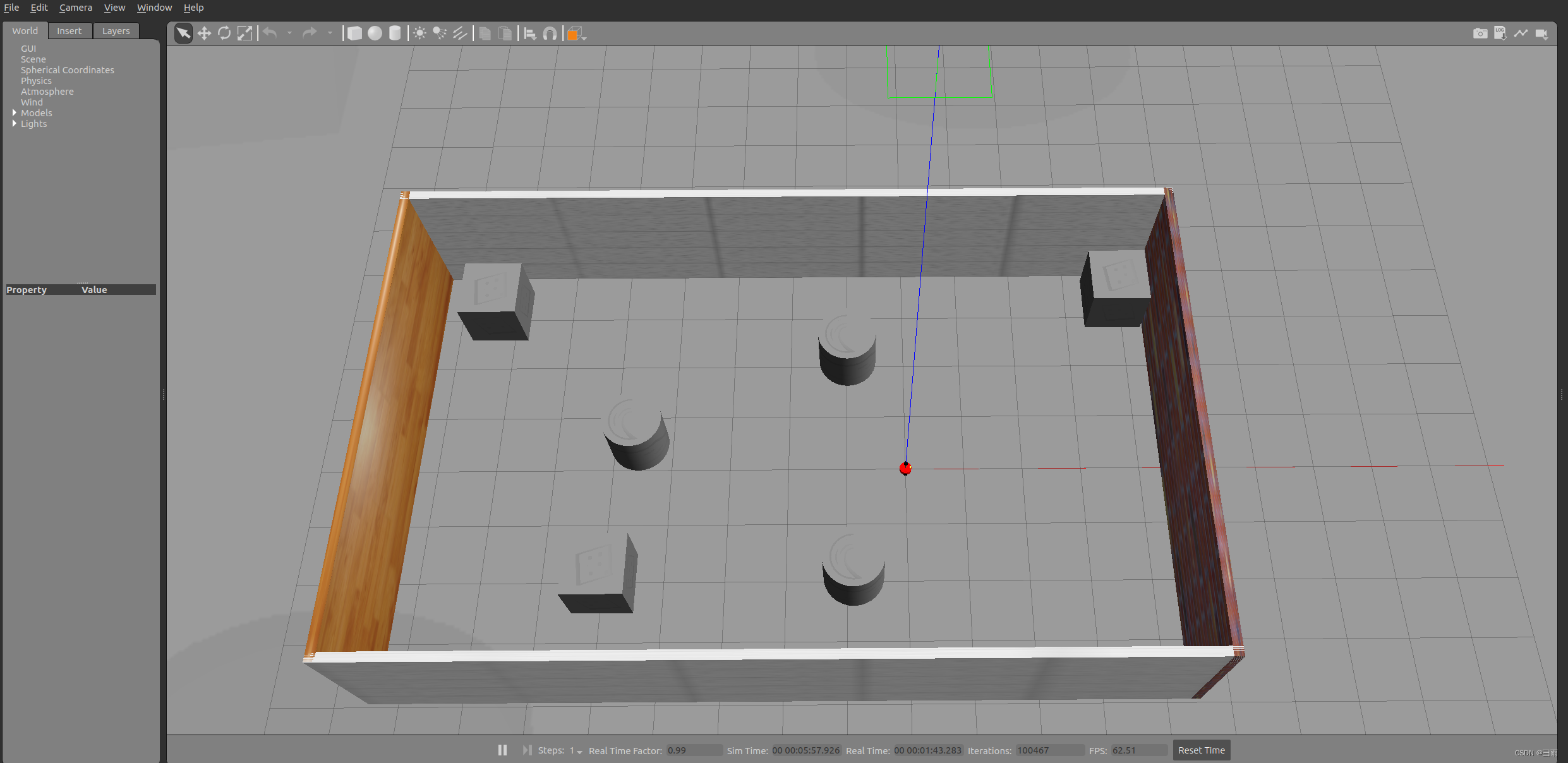
2.3 保存为 world 文件
可以像方式1一样再添加一些插件,然后保存为 world 文件(保存路径功能包下的: worlds)
2.4 启动
3.使用官方提供的插件
当前 Gazebo 提供的仿真道具有限,还可以下载官方支持,可以提供更为丰富的仿真实现,具体实现如下:
3.1 下载官方模型库
git clone https://github.com/osrf/gazebo_models
之前是:hg clone https://bitbucket.org/osrf/gazebo_models但是已经不可用
注意: 此过程可能比较耗时
3.2 将模型库复制进 gazebo
将得到的gazebo_models文件夹内容复制到 /usr/share/gazebo-*/models
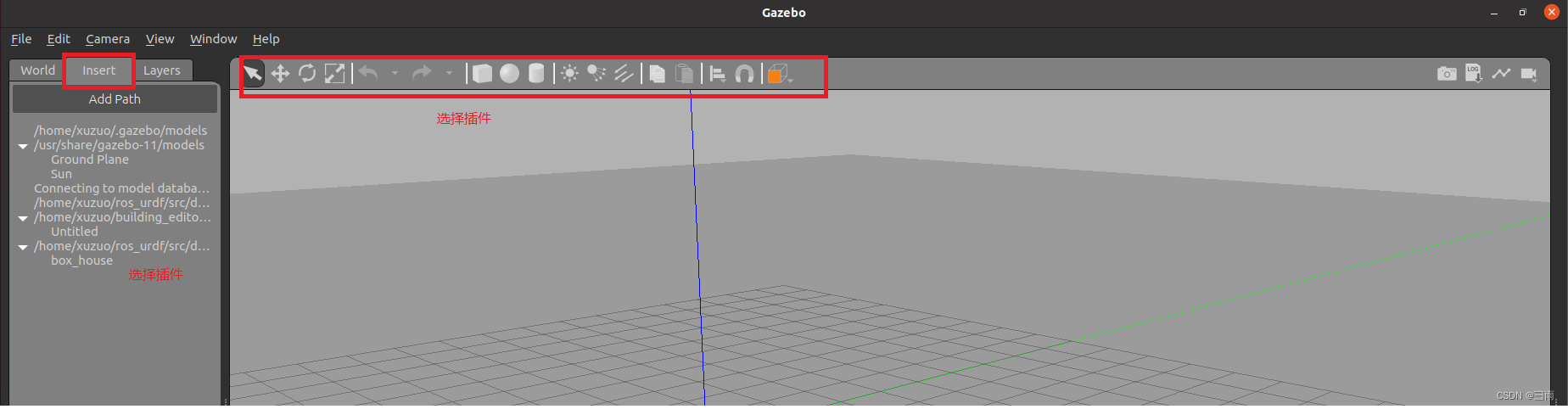
3.3 应用
重启 Gazebo,选择左侧菜单栏的 insert 可以选择并插入相关道具了
参考:
[1]Autolabor-ROS机器人入门课程《ROS理论与实践》季基础教程
[2]【Autolabor初级教程】ROS机器人入门
[3]胡春旭.ROS机器人开发实践[M].机械工业出版社,2018.
这篇关于ROS-urdf集成gazebo的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







