本文主要是介绍图文并茂详细教程之---Pixhawk扩展思岚A1激光雷达实现360°避障,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
转载自:https://mp.weixin.qq.com/s/FCBbjAmmn-rMDskIen_i4Q
图文并茂详细教程之---Pixhawk扩展思岚A1激光雷达实现360°避障
原创 CJKK 苍穹四轴DIY 今天
本节教程主要介绍思岚A1激光雷达如何连接Pixhawk2.4.8飞控用于简单避障(遇到障碍自动停止前进)。
此方法雷达连接飞控串口,不需要建图,因此不需要使用机载电脑。
思岚A1激光雷达可实现360°二维避障。
请务必在飞行器已经能正常平稳飞行,并且操作熟练的情况下进行。因为激光雷达有机械转动部分,非正常着陆大概率会损坏!
一、硬件准备:
-
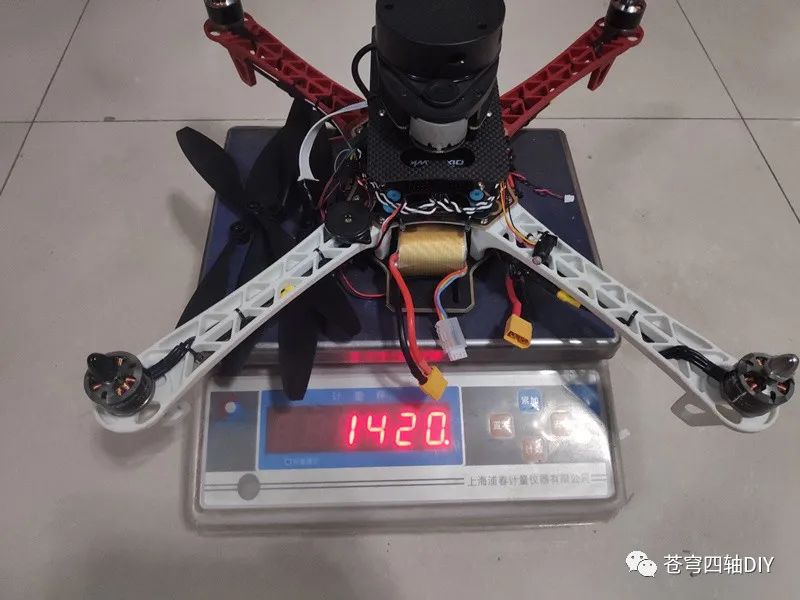
已经组装调试好的pixhawk无人机一台
TB购买链接:F450无人机
TB购买链接:Z410无人机
-
思岚A1激光雷达
-
多功能扩展板
TB购买链接:多功能扩展板
-
UBEC模块
TB购买链接:UBEC模块
-
杜邦公头线,6针接口及连接线,JST母头线等。
二、软件准备:
-
missionplanner下载链接1.3.62免安装版:
https://pan.baidu.com/s/1yLy7OK2PmpSmoB7bu3BA7w
提取码:5qrh
-
固件用的3.6及以上均可,测试机型用的3.6.12
三、安装教程:
-
由于A1出厂没有配pixhawk飞控的连接线,需要自己改线。
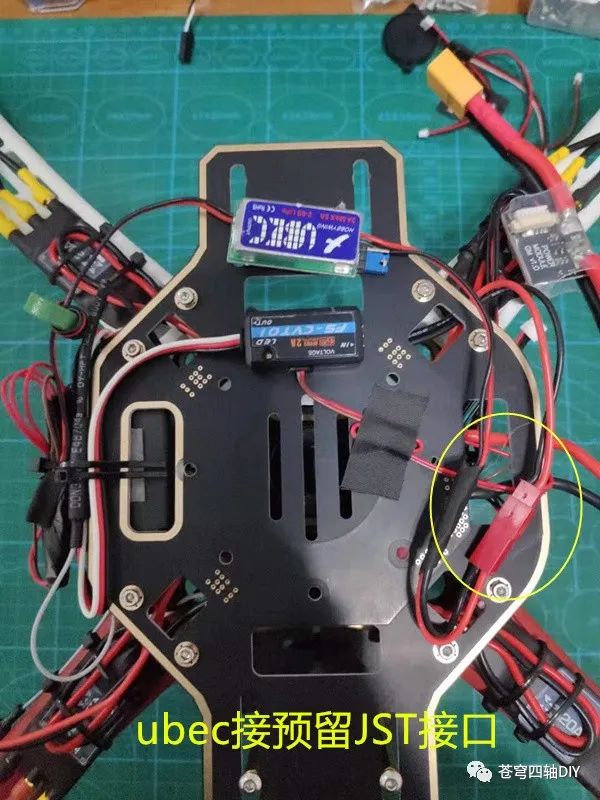
激光雷达需要单独提供一个5V电源(用一个UBEC模块),不能从飞控取电。
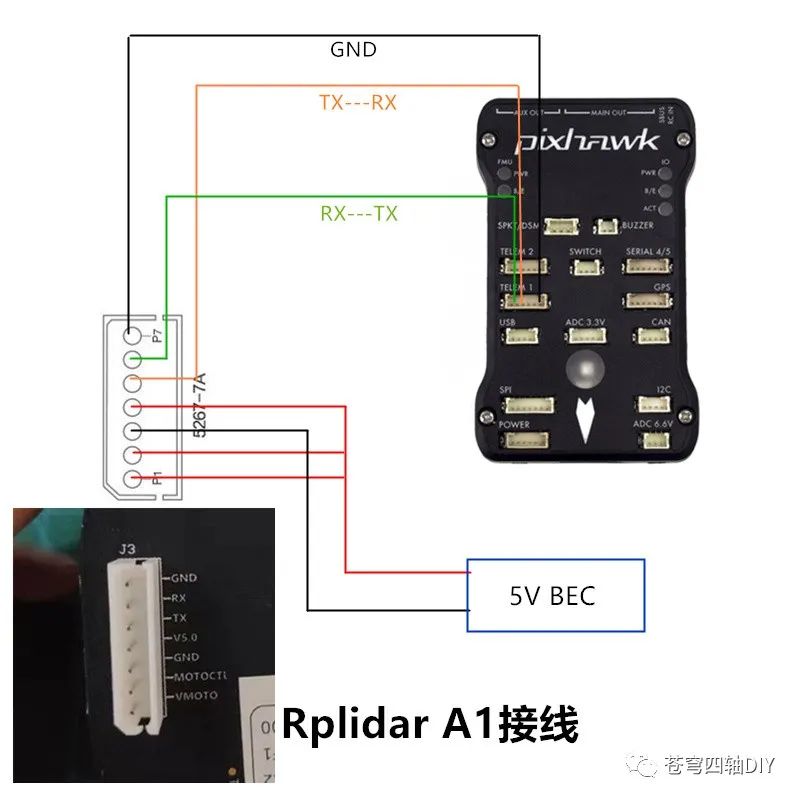
特别注意:正负极不能接错,否则会导致激光雷达损坏!!!
实际改线图

注意:雷达配置的白色原装线不要剪坏接头,用杜邦公头线(针头)插上改线就可以了。
-
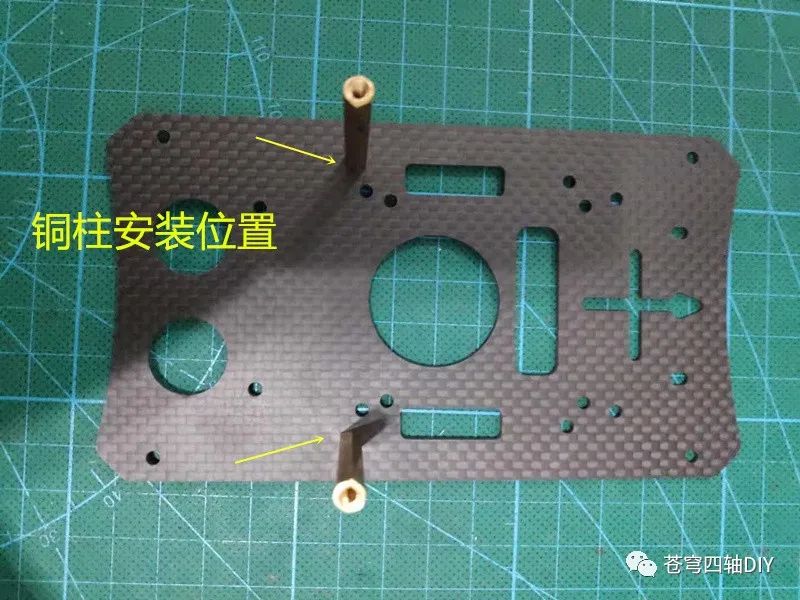
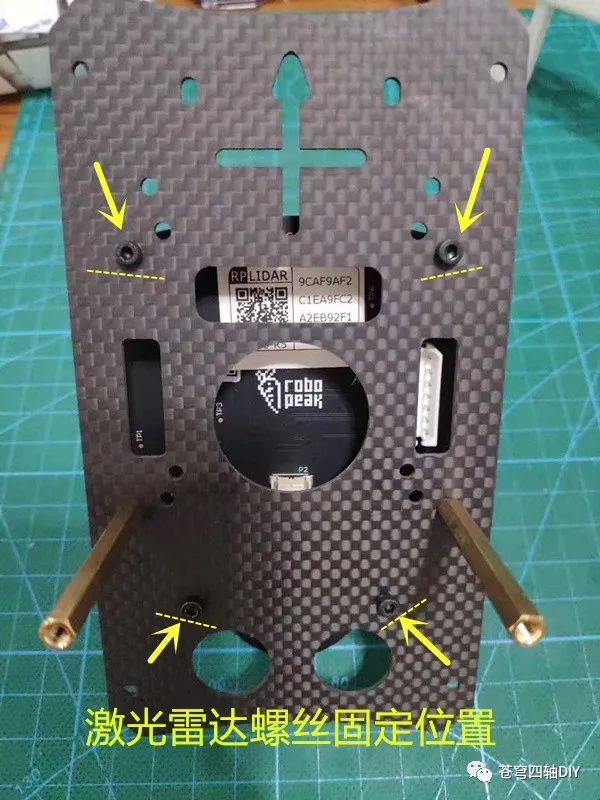
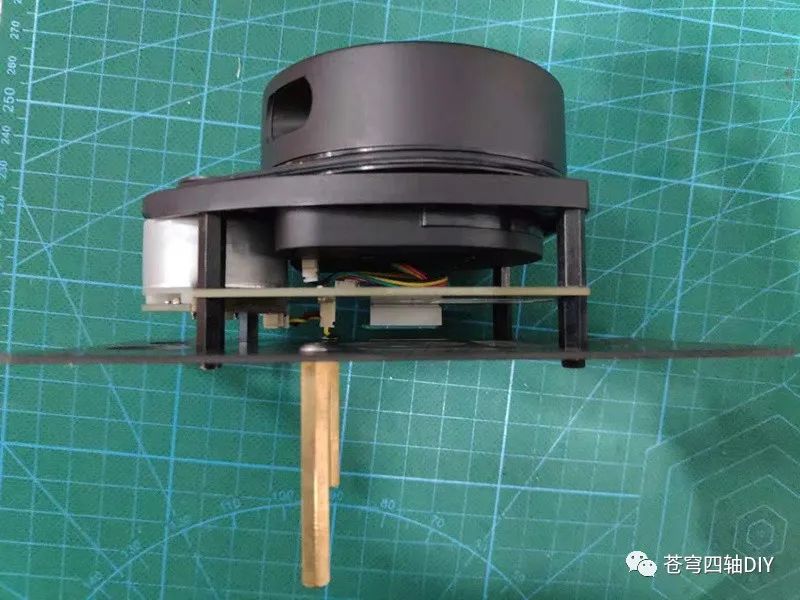
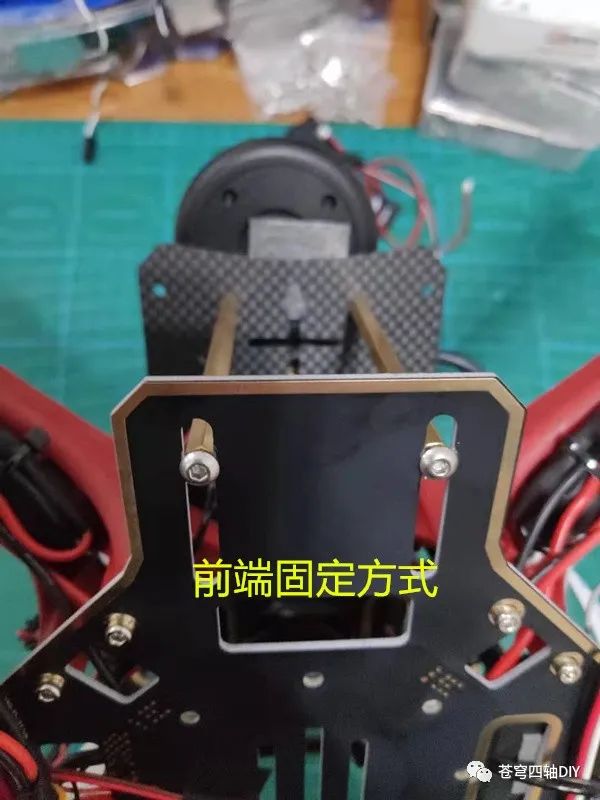
安装顺序

激光雷达可与飞控telem1、telem2、serial4/5连接,我们以telem1为例。
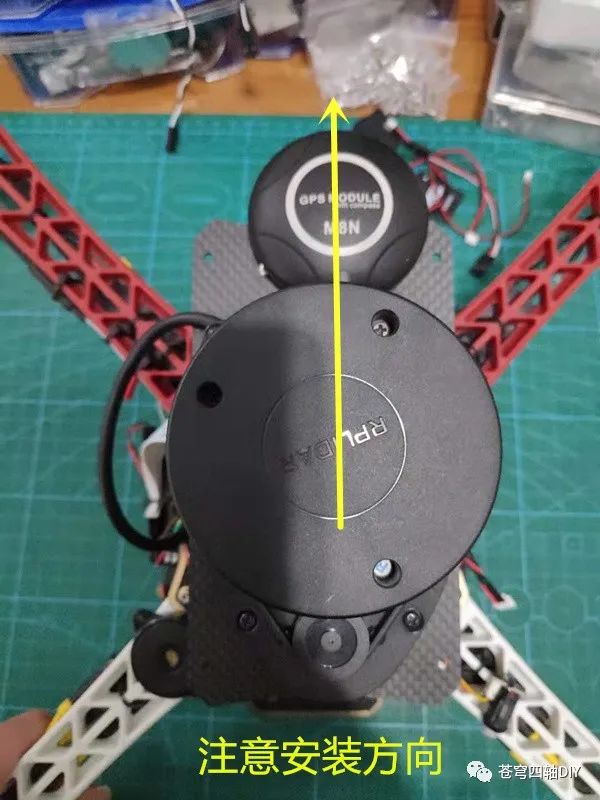
如上图所示,激光雷达的安装前向要与无人机前向一致。

四、参数设置:
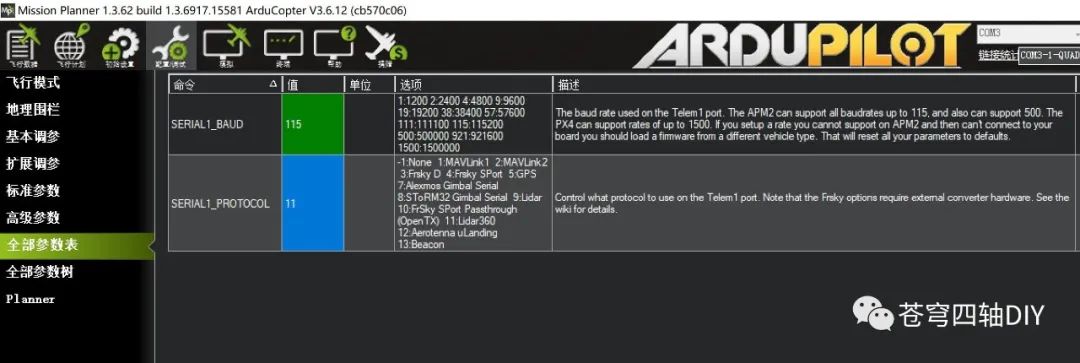
SERIAL1_PROTOCOL = 11 /端口功能SERIAL1_BAUD = 115 /端口波特率
PRX_TYPE = 5 /MP1.3.62版本没有这个参数,MP1.3.74里有,不管哪个版本,设置即可。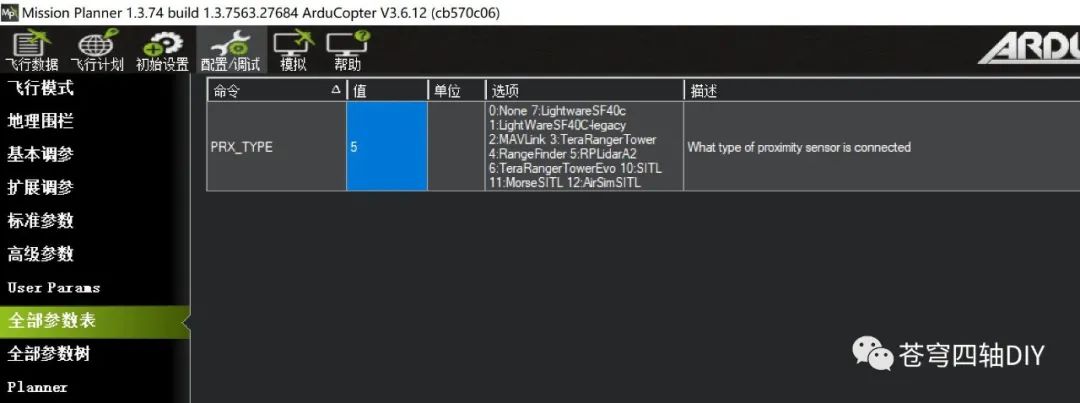
PRX_ORIENT = 0 如果正向安装在无人机顶部,为0,如果颠倒安装在无人机底部,则为1。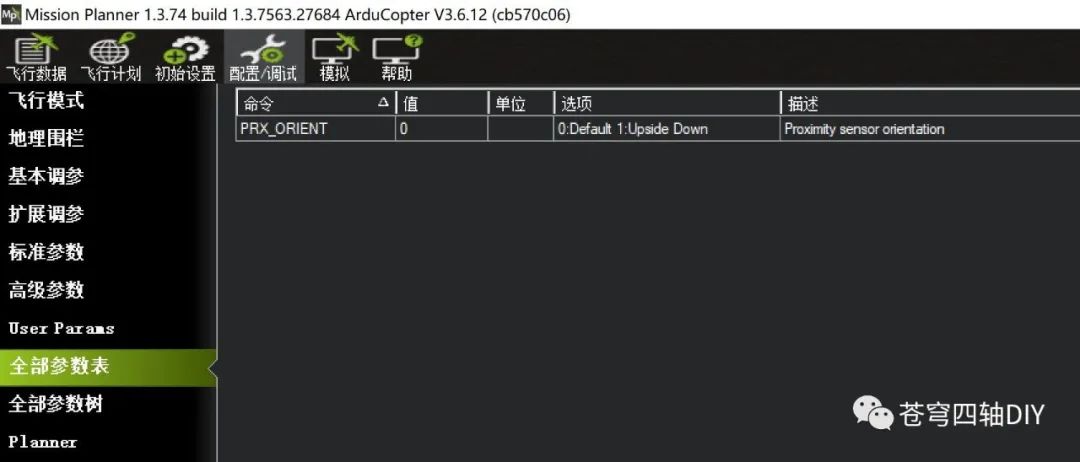
注意:如果是使用telem1或则telem2,还需要关闭流控制。如果是serial4/5口不需要设置这个参数。
BRD_SER1_RTSCTS =0 或则 BRD_SER1_RTSCTS =0
以上参数设置完毕,需要重新启动飞控。确定激光雷达接线无误,将无人机接上电池,飞控连接MP。
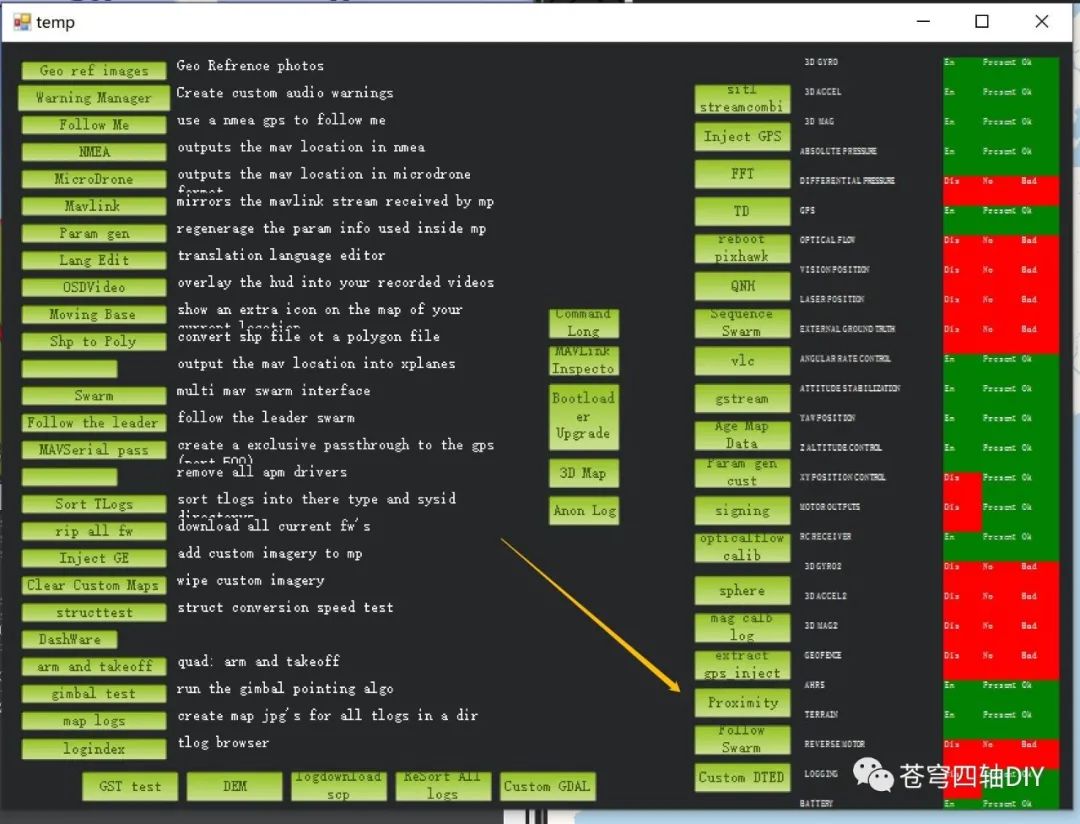
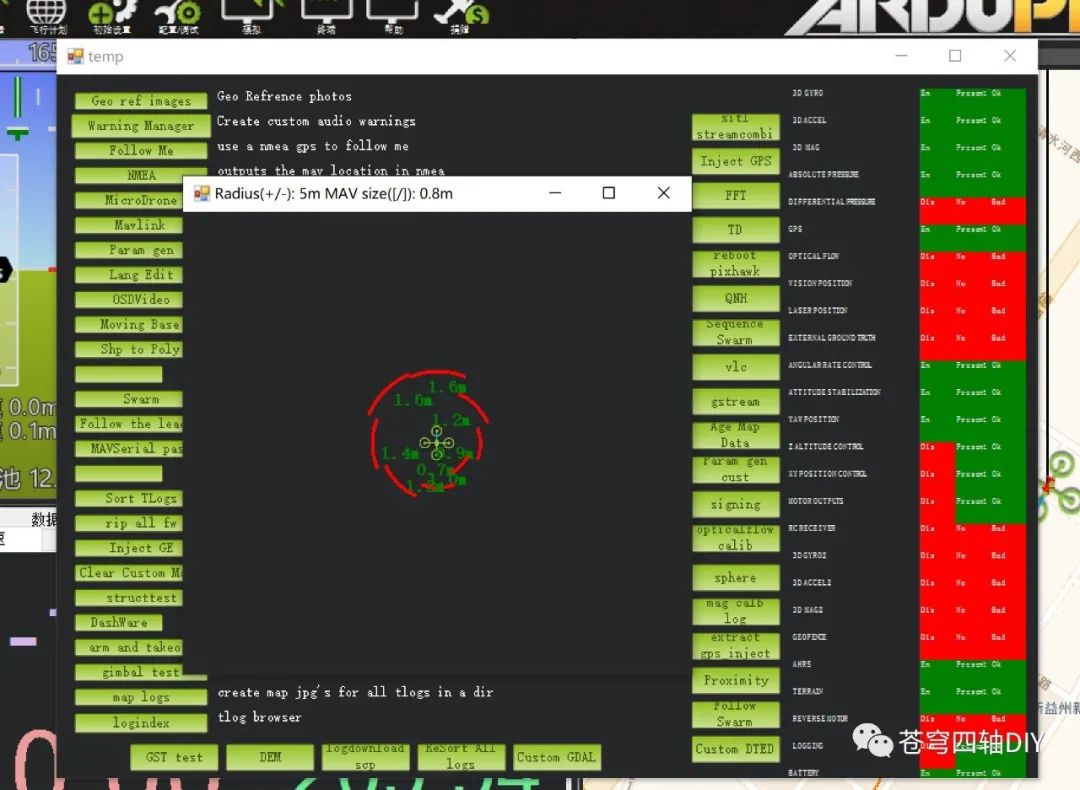
使用快捷键Ctrl+F,点击 proximity,就能看到雷达窗口数据。
五、开启避障功能
AVOID_ENABLE = 7 允许所有避障源
CH8_OPT=40 使用遥控器8通道开关来控制打开关闭避障功能;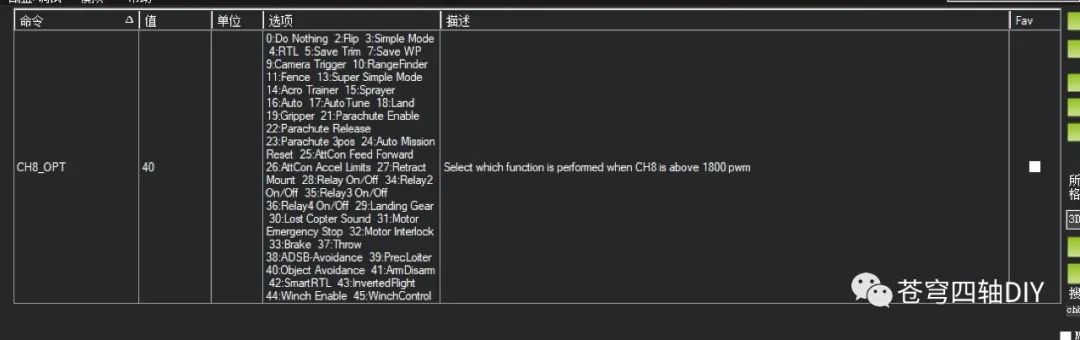
AVOID_MARGIN =2 开始避障的距离;AVOID_BEHAVE=1 遇到障碍物采取的动作 0:滑动 1:停止


六、飞行测试视频:
这篇关于图文并茂详细教程之---Pixhawk扩展思岚A1激光雷达实现360°避障的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



