本文主要是介绍51系列--基于MPX4250的压力计仿真设计,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
本文介绍基于MPX4250的压力计仿真设计(完整仿真源文件及代码见文末链接)
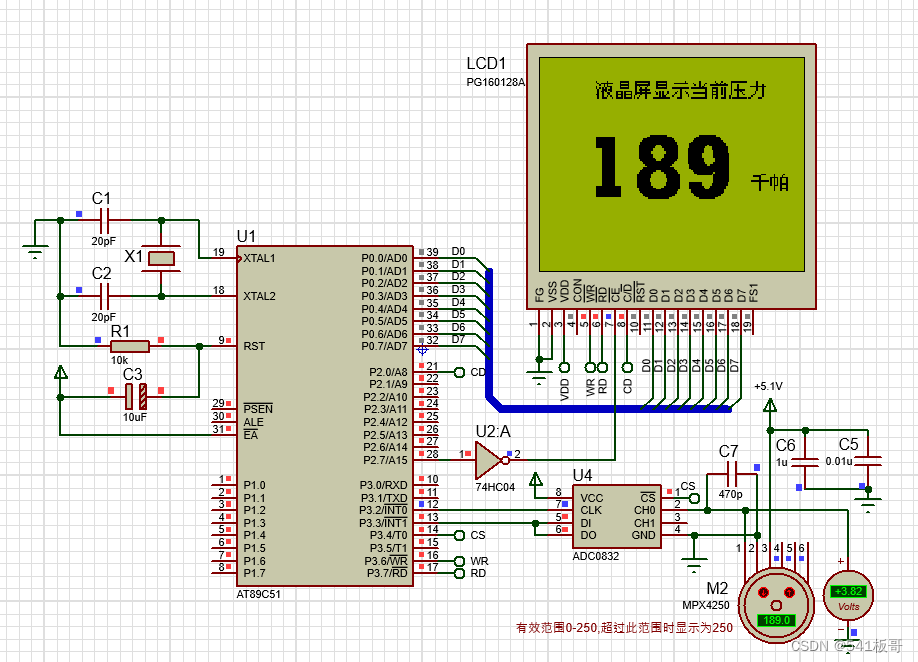
MPX4250是一种线性度极强的一种压力传感器,它的线性范围为20-250kpa,测量范围也比较广泛,适用于大多数场合的压力检测。

仿真图如下
仿真运行视频
51系列--基于MPX4250的压力计仿真设计
附完整Proteus仿真资料+代码资料
链接:https://pan.baidu.com/s/1pGDCadg08m8UhJxiVvQICA?pwd=dbb7
提取码:dbb7
这篇关于51系列--基于MPX4250的压力计仿真设计的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









