本文主要是介绍BearPi Std 板从入门到放弃 - 引气入体篇(10)(PWM),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
简介
仍然是基于前面的文章, 不再说明创建项目的过程, 本例使用PWM方式,通过按键Key1 增量\ Key2 减量实现LED的亮度调高调低;
开发板 : Bearpi Std(小熊派标准板)
主芯片: STM32L431RCT6
LED : PC13 \ 推挽输出即可 \ 高电平点亮
KEY1 : PB2 \ 上拉 \ 按下下降沿触发(一次)\ 用于增值
KEY2 : PB3 \ 上拉 \ 按下下降沿触发(一次) \ 用于减值
E53_ST1扩展板/E53_IA1扩展板: 因为这两块扩张板都有LED灯接到PA0 : PA0/TIM2_CH1 的PWM输出引脚
步骤
-
打开STM32CubeMX项目, 并初始化
LED\KEY1\KEY2 -
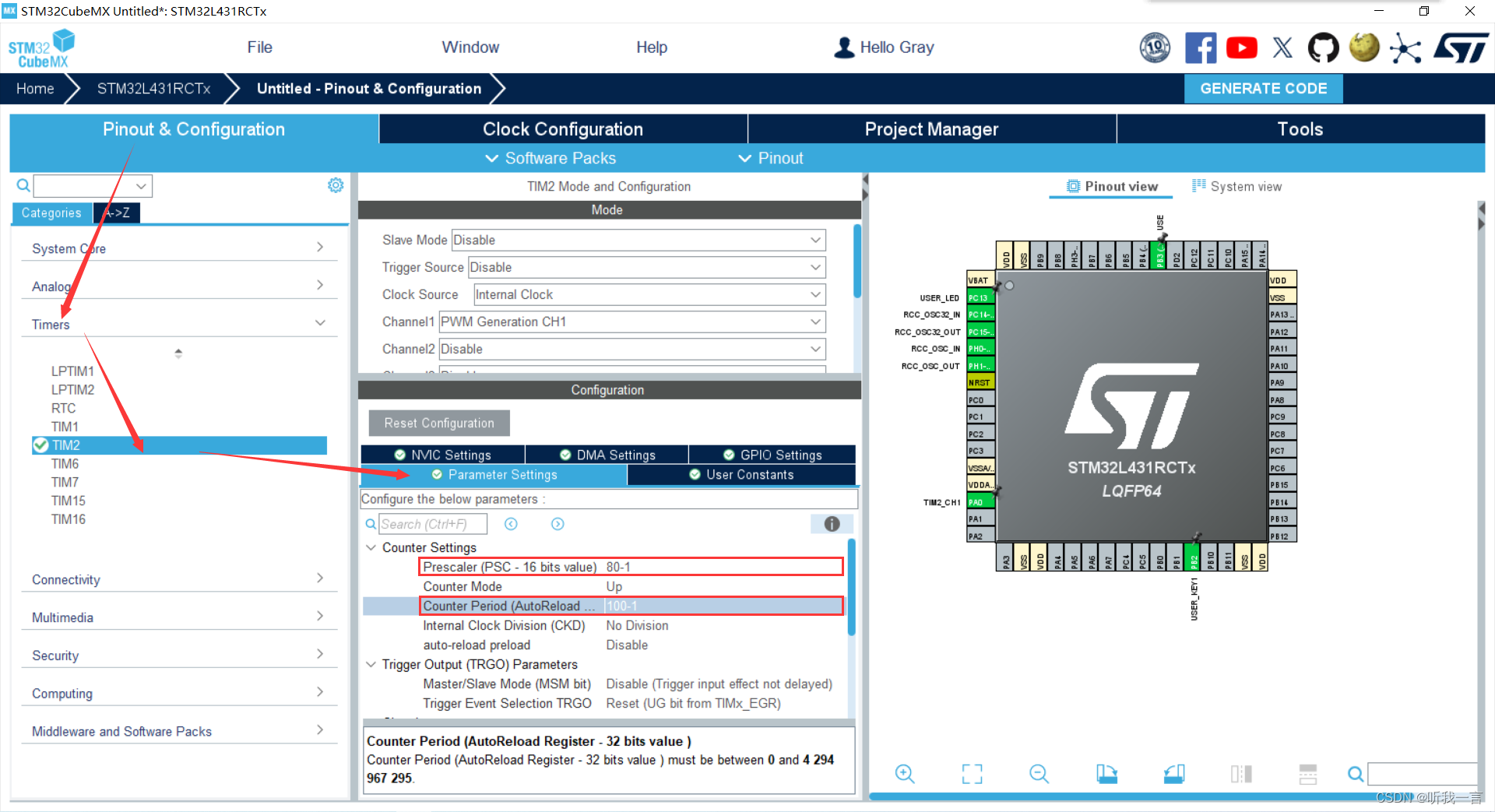
TIM2 配置, 实现PWM输出
PA0 引脚初始化, 选择TIM2_CH1

TIM2 CH1 作为PWM输出

TIM2内部时钟默认就是80MHz, 设置预分频和计数周期
Tpwm = 80MHz/(80 * 500) = 2KHz
-
生成代码工程 BearPi_TIM2_CH1_PWM
-
添加用户代码
int main(void)
{/* USER CODE BEGIN 1 */uint32_t pwmValue = 0;uint16_t pwmIncrementValue = 100;uint16_t pwmMaxValue = 500;/* USER CODE END 1 */.../* USER CODE BEGIN 2 */HAL_GPIO_TogglePin(USER_LED_GPIO_Port, USER_LED_Pin); // 点亮用户灯HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_1); // 启动PWM输出__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_1, pwmValue); // 设置默认PWM值0/* USER CODE END 2 */while (1){.../* USER CODE BEGIN 3 */if (HAL_GPIO_ReadPin(USER_KEY1_GPIO_Port, USER_KEY1_Pin) == RESET){HAL_Delay(100);if (HAL_GPIO_ReadPin(USER_KEY1_GPIO_Port, USER_KEY1_Pin) == RESET){if (pwmValue < pwmMaxValue){pwmValue += pwmIncrementValue;__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_1, pwmValue);}}}else if (HAL_GPIO_ReadPin(USER_KEY2_GPIO_Port, USER_KEY2_Pin) == RESET){HAL_Delay(100);if (HAL_GPIO_ReadPin(USER_KEY2_GPIO_Port, USER_KEY2_Pin) == RESET){if (pwmValue > 0){pwmValue -= pwmIncrementValue;__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_1, pwmValue); }}}}/* USER CODE END 3 */}
前言后讲
PWM周期公式:
Tpwm = ( (ARR + 1) * (PSC + 1) ) / TclkTclk为定时器的输入时钟频率Tout则为定时器溢出时间ARR为计数周期PSC为预分频器的值PWM频率 计算公式:
Fpwm = 主频 / ((ARR+1)(PSC+1))占空比的计算公式为 :
duty circle = TIMx->CCRy / ARRCCRy代表比较寄存器本例中Fpwm 频率为 Fpwm = 80MHz/(500 * 80) = 2KHz占空比 = TIMx->CCRy / ARR = TIMx->CCRy / 500占空比最大是1 最小是0, 所以值最大500, 最小0
BearPi_TIM2_CH1_PWM 完整工程代码
这篇关于BearPi Std 板从入门到放弃 - 引气入体篇(10)(PWM)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







