本文主要是介绍【古月居《ros入门21讲》学习笔记】05_ROS是什么及其核心概念,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
说明
1. ROS发展史
ROS版本演变
2. ROS是什么
ROS中的通信机制
ROS中的开发工具
ROS中的应用功能
ROS中的生态系统
3. ROS核心概念
节点与节点管理器
通信方式1:话题
通信方式2:服务
话题与服务的区别
参数
文件系统
说明
1. 本系列学习笔记基于B站:古月居 《ROS入门21讲》课程;
2. 本节是整个笔记的第5节,对应视频课程的第6,7节,请自行对应学习;
3. 整个系列笔记基本已经完结,但部分章节仍需润色修改 ,后面会陆续发布,请大家持续关注,创作不易,感谢支持!
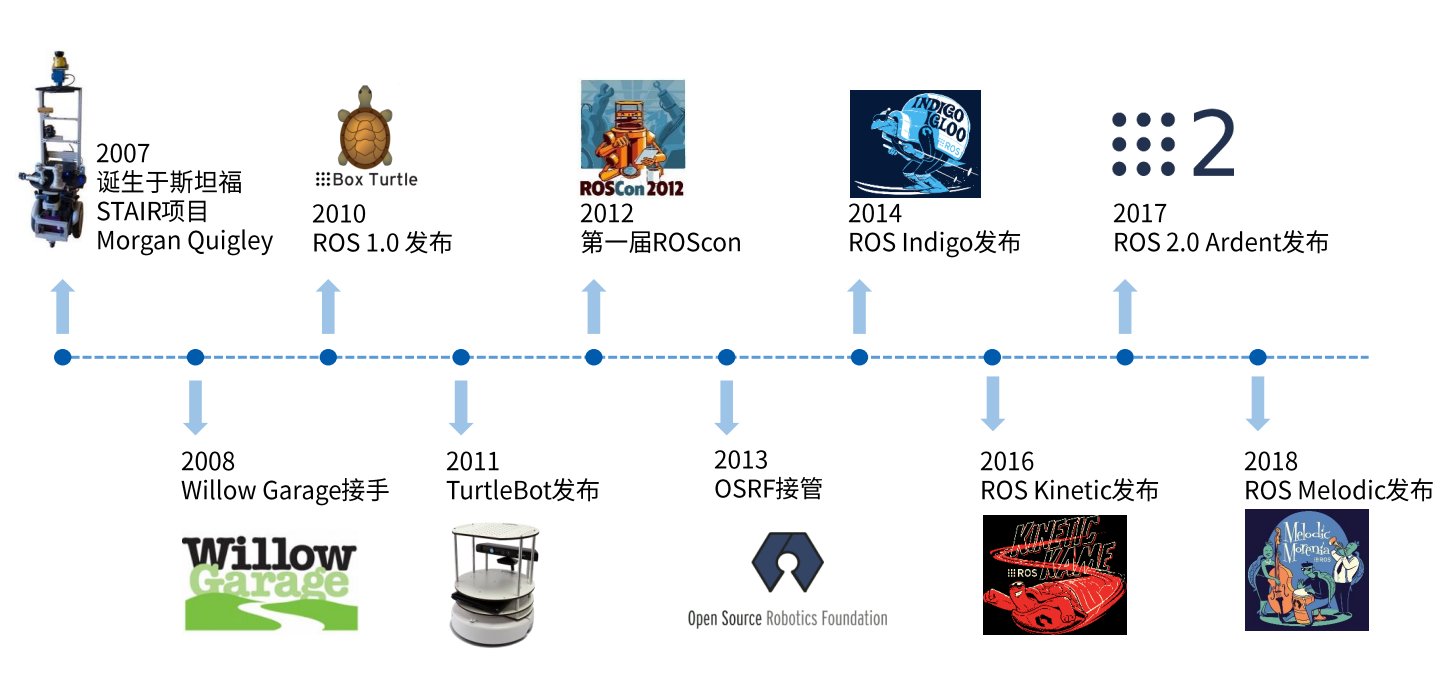
1. ROS发展史
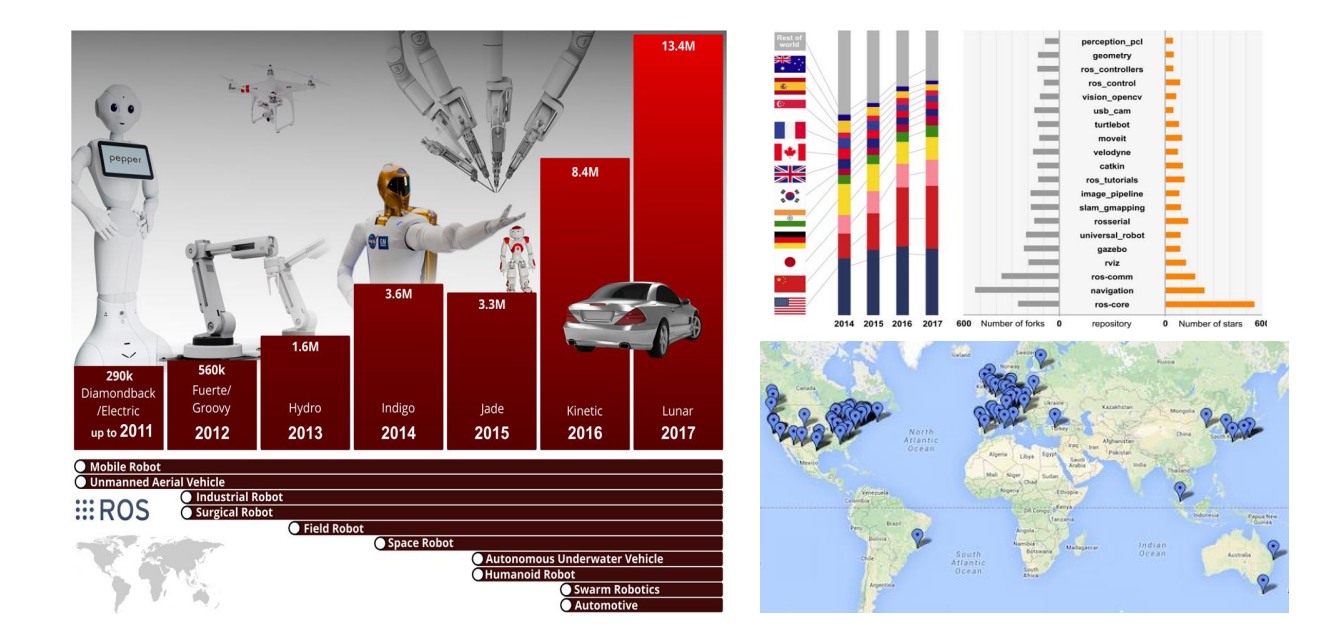
ROS系统最早起源于2007年斯坦福大学人工智能实验室的STAIR项目与机器人技术公司Willow Garage的个人机器人项目(Personal Robotics Program)之间的合作,2008年之后由Willow Garage公司推动其发展,2010年正式开源,发布ROS1.0;
2012年组织第一届ROS开发者大会,以后每年一届,会由不同的国家主办;之后Willow Garage经营不善,团队解散,2013年ROS的维护者成立了一个开源机器人基金组织(OSRF)来继续推进ROS的发展,并先后在2014年和2016年发布两款长期支持版(Long Term Support)的ROS(Indigo和Kinetic)和Ubuntu(乌班图)长期支持版保持同步的维护时间,可以得到5年的更新维护。
ROS版本演变
注意:ROS开发对环境的要求极高,ROS的版本需要与Ubuntu的版本号对应
| ROS版本 | ubuntu版本 |
|---|---|
| Melodic | ubuntu18.04 |
| Noetic | ubuntu20.04 |
ROS1版本


ROS2版本


2. ROS是什么
ROS是机器人操作系统英文全称(Robot Operating System, ROS)的缩写,一种用于编写机器人机器人软件程序的灵活框架,它包含了大量工具软件、库代码和约定协议,旨提高机器人研发中的软件复用率,减少重复造轮子,使用ros开发机器人使开发机器人的难度和成本大大降低,同时他也为开发人员提供了一个平台。
ROS虽然叫做操作系统, 但并非Windows、 Mac那样通常意义上的操作系统, 它是连接操作系统和你开发的ROS应用程序之间的一个中间件, 基于ROS的应用程序之间建立起了沟通的桥梁, 所以也是运行在Linux上的运行环境, 在这个环境上, 机器人的感知、 决策、 控制算法可以得到很好的组织和运行。

ROS = 通信机制 + 开发工具 + 应用功能 + 生态系统
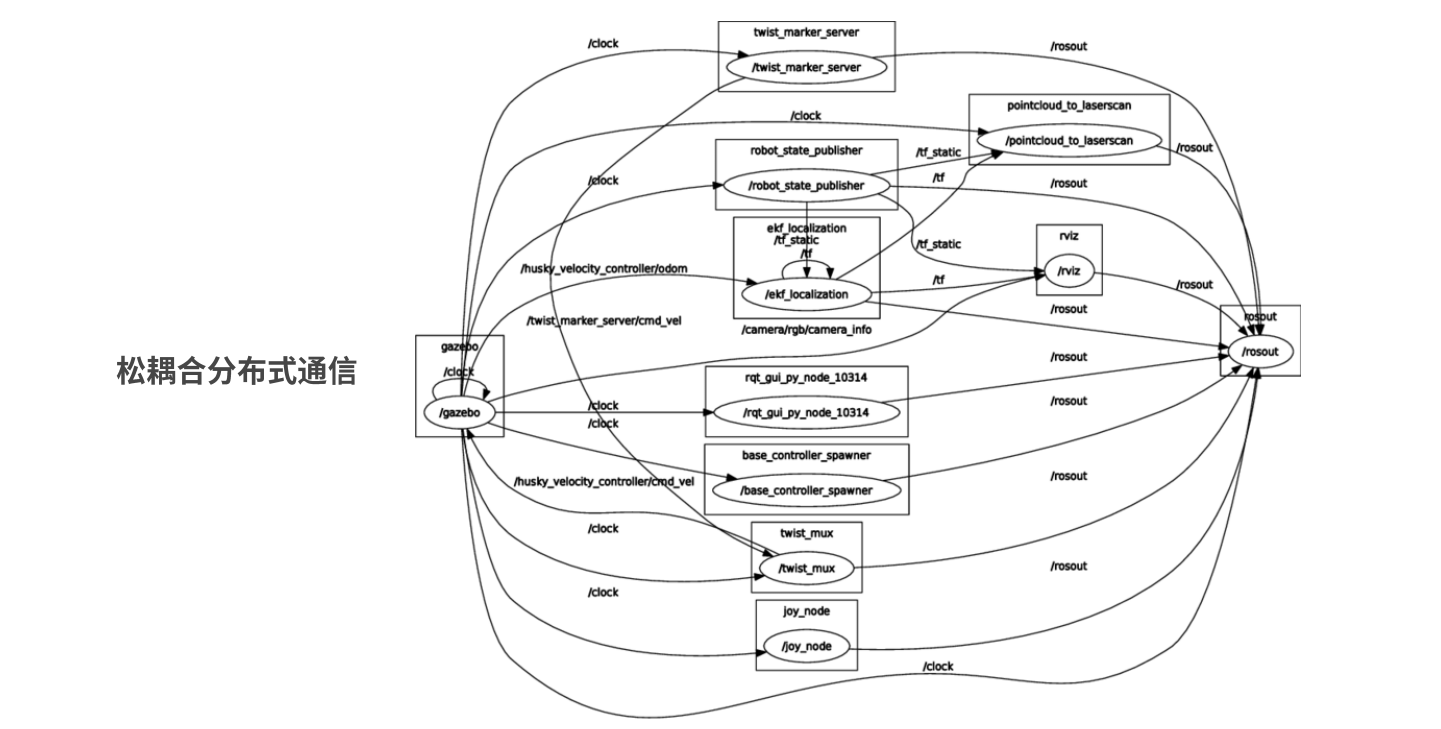
ROS中的通信机制
ROS中的核心通信机制就是一个计算图(Computational Graph)
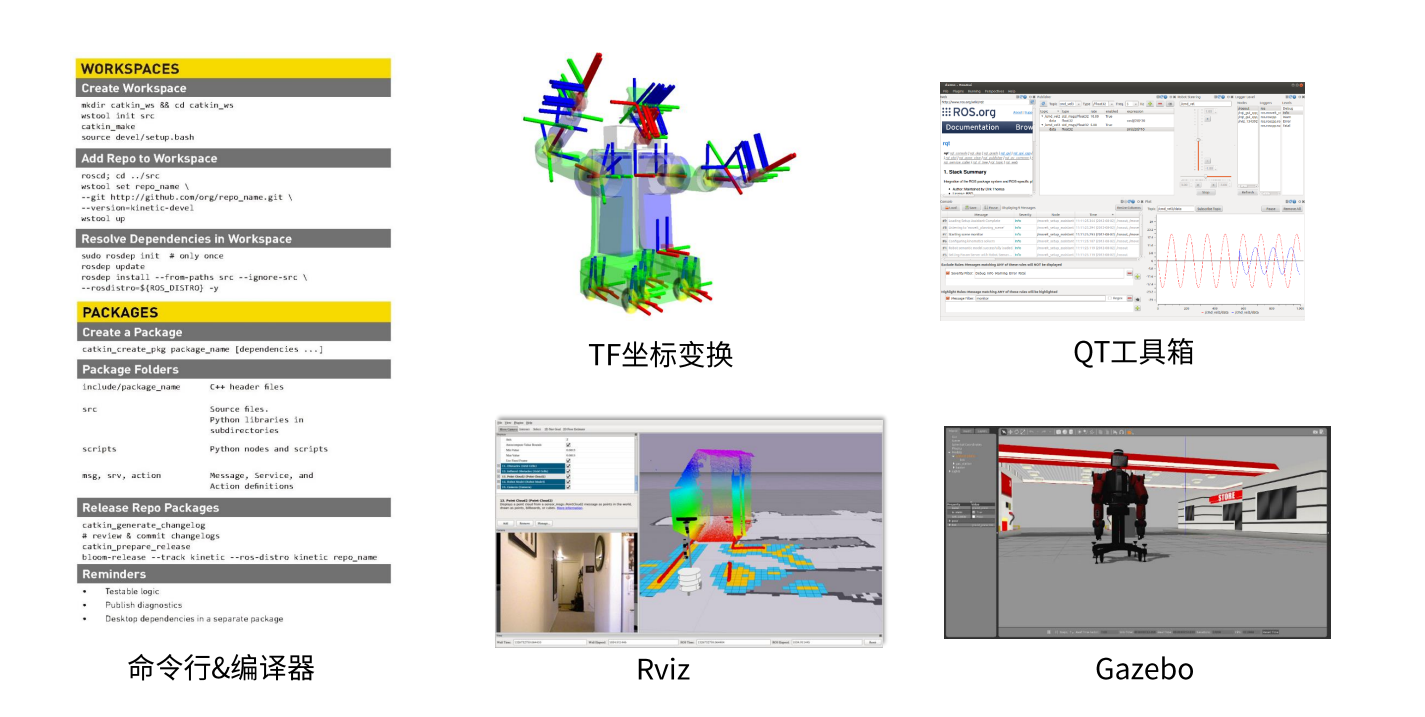
ROS中的开发工具
ROS提供了大量的工具,如:仿真、数据可视化、图形界面、数据记录
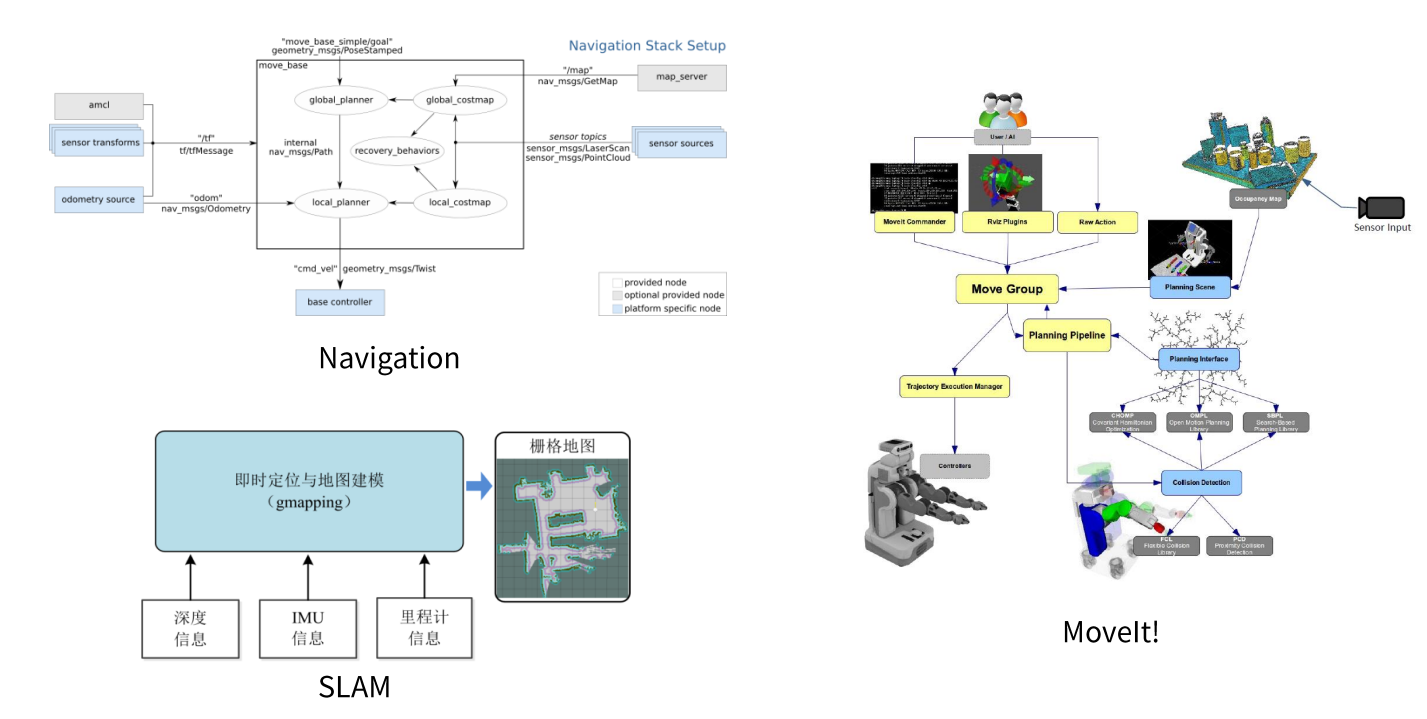
ROS中的应用功能
ROS提供了广泛的库文件可以实现机器人的控制、规划、视觉、建图等功能
ROS中的生态系统
ROS的支持与发展依托着一个强大的社区
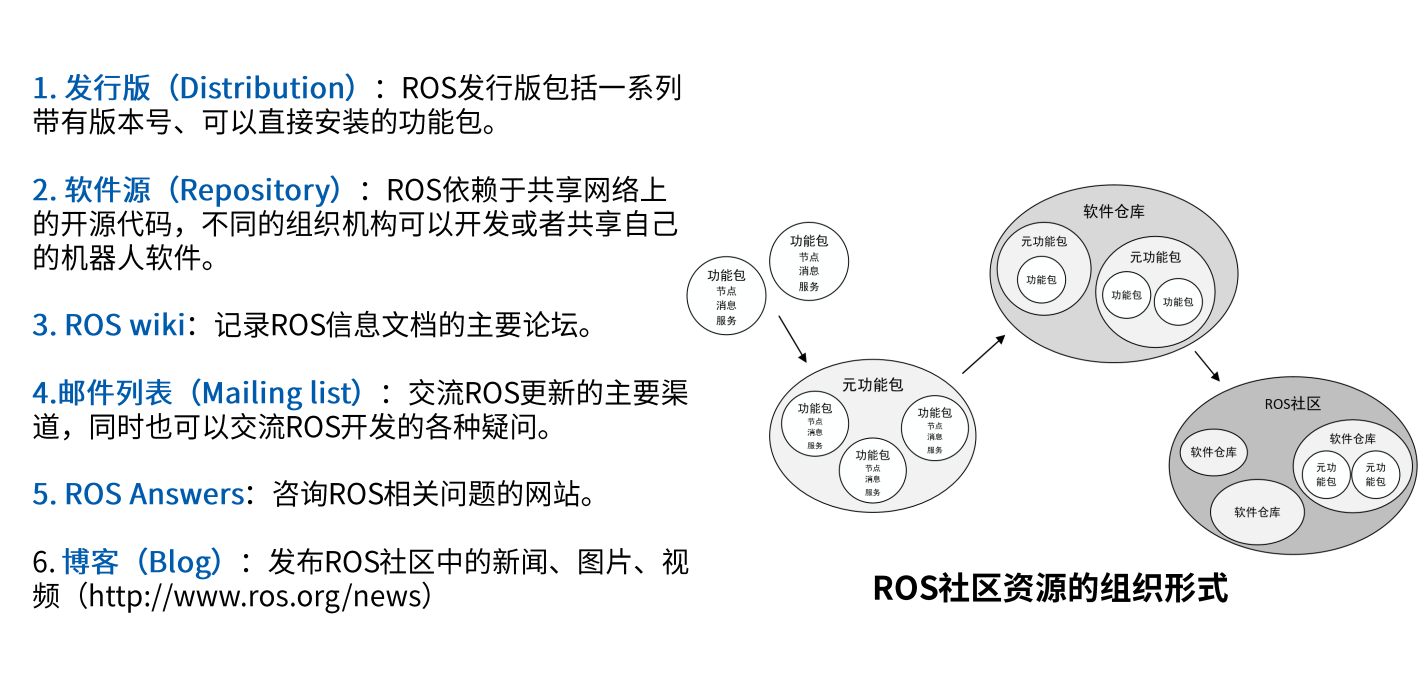
ROS社区 内的功能包数量、关注度、相关文章均呈指数级上涨
3. ROS核心概念
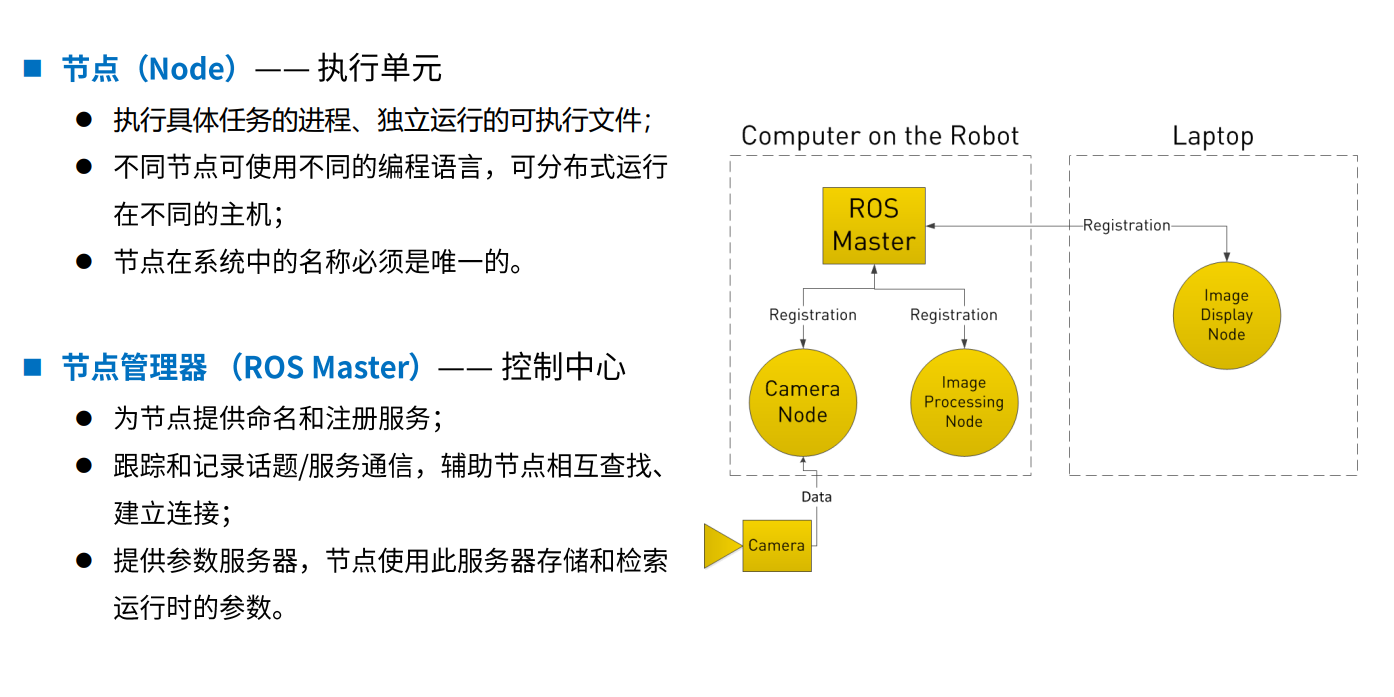
节点与节点管理器
-
节点之间互相并不知道彼此的存在,都是由ROS Master帮助它们互相之间建立连接的
通信方式1:话题

-
话题通信方式是单向数据的传输;
-
详细的定义就是消息;
-
Message:定义数据的类型,具有一定的数据结构定义;
-
传输数据的管道就是话题;
-
话题的消息的接口使用 .msg 文件定义
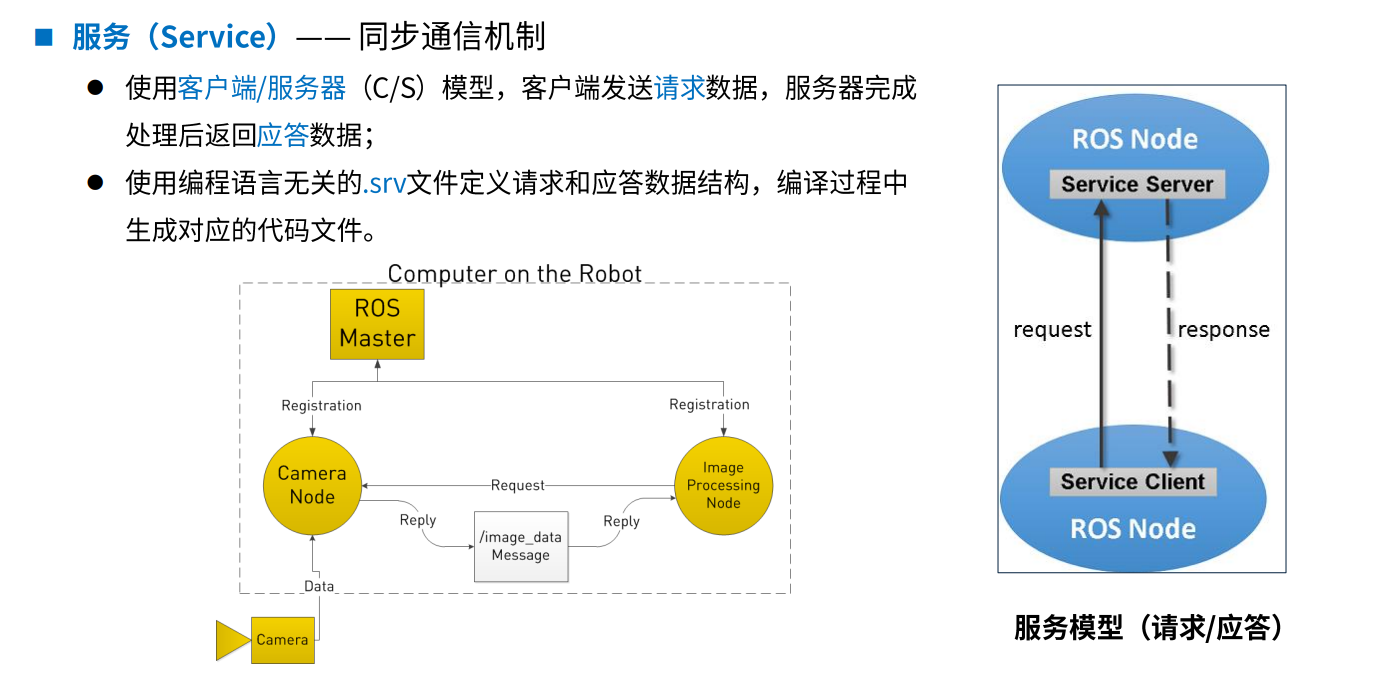
通信方式2:服务
-
服务通信方式是双向的;
-
类似web访问机制;
-
服务的数据内容用 .srv 文件定义
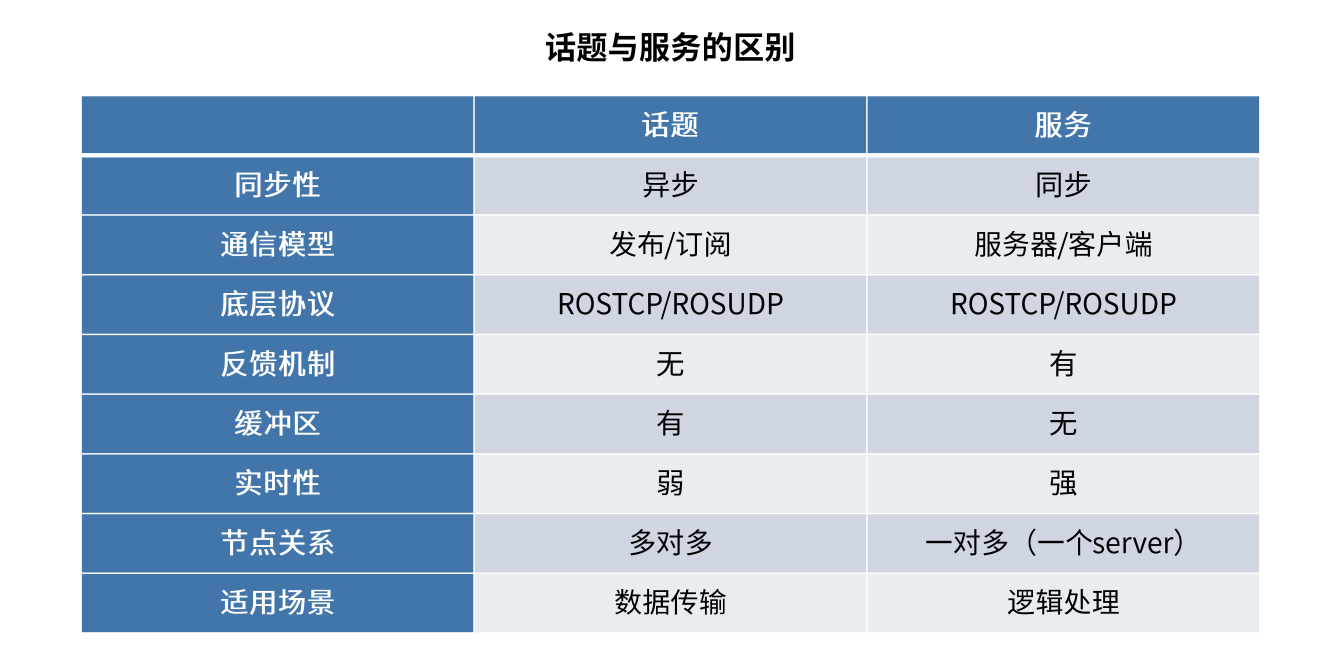
话题与服务的区别
参数
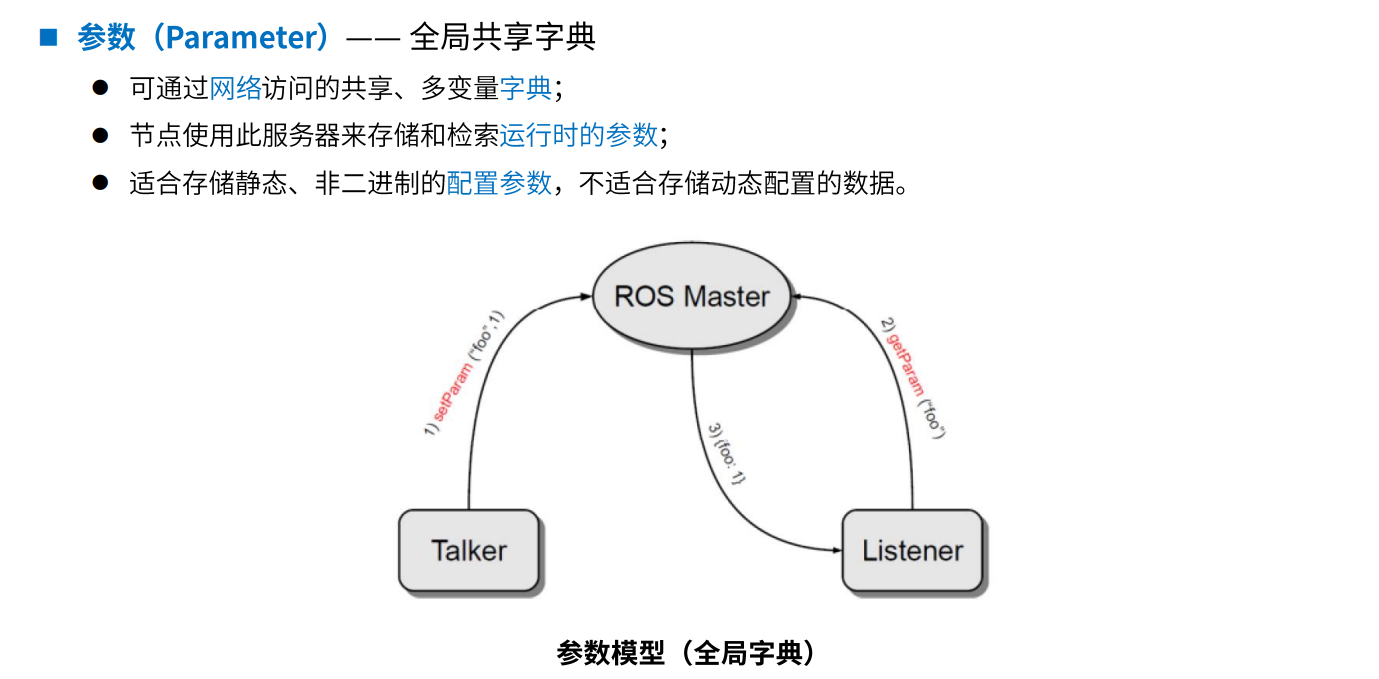
-
存储在ROS Master服务器,节点可以对参数进行存储、检索、更新等操作;
文件系统
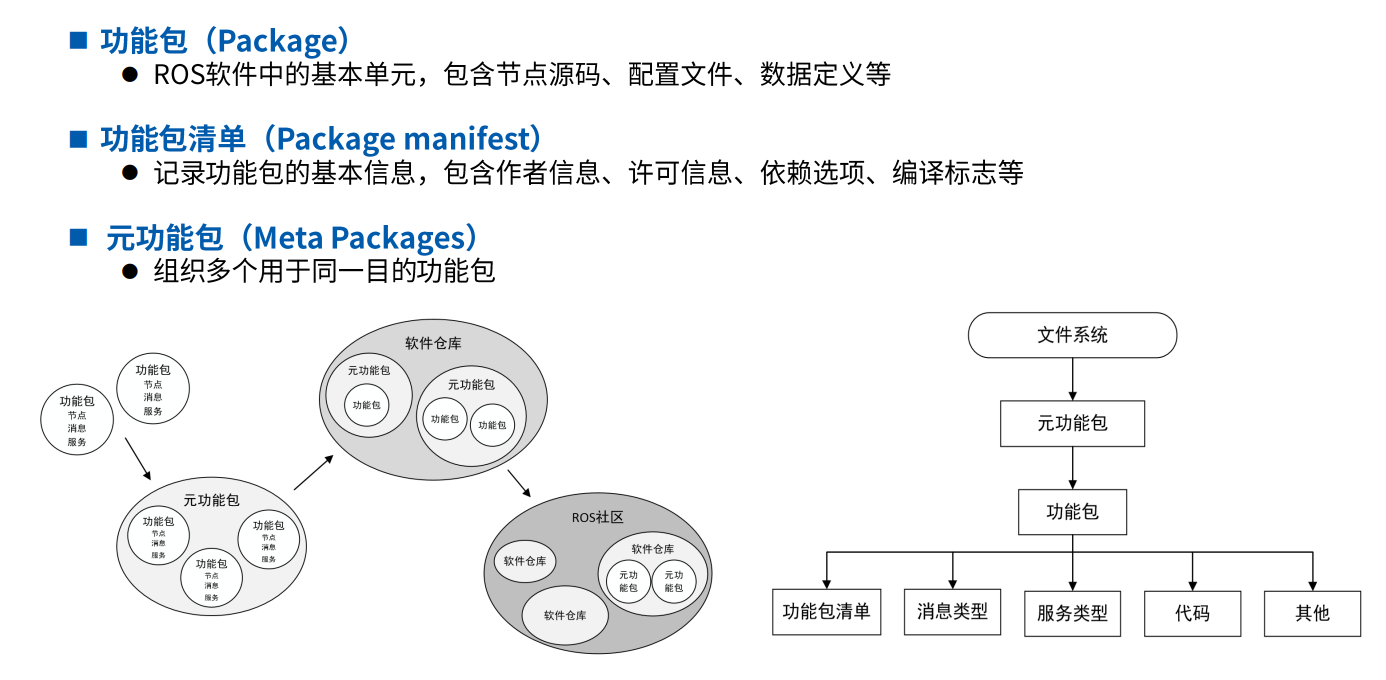
-
文件系统其实也就是代码的结构
这篇关于【古月居《ros入门21讲》学习笔记】05_ROS是什么及其核心概念的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







