本文主要是介绍(一)基于高尔夫优化算法GOA求解无人机三维路径规划研究(MATLAB),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、无人机模型简介:
单个无人机三维路径规划问题及其建模_IT猿手的博客-CSDN博客
参考文献:
[1]胡观凯,钟建华,李永正,黎万洪.基于IPSO-GA算法的无人机三维路径规划[J].现代电子技术,2023,46(07):115-120
二、高尔夫优化算法GOA简介
高尔夫优化算法(Golf Optimization Algorithm,GOA)由Montazeri Z等人于2023年提出,该算法模拟高尔夫运动过程中的球员击打高尔夫所采取的战术策略,能够有效平衡全局搜索和局部搜索的能力。
多目标优化算法:基于非支配排序的高尔夫优化算法(NSGOA)MATLAB-CSDN博客
参考文献:
[1] Montazeri Z, Niknam T, Aghaei J, Malik OP, Dehghani M, Dhiman G. Golf Optimization Algorithm: A New Game-Based Metaheuristic Algorithm and Its Application to Energy Commitment Problem Considering Resilience. Biomimetics. 2023; 8(5):386. Biomimetics | Free Full-Text | Golf Optimization Algorithm: A New Game-Based Metaheuristic Algorithm and Its Application to Energy Commitment Problem Considering Resilience
三、高尔夫优化算法GOA求解无人机路径规划
(1)部分代码
close all
clear
clc
addpath('./Algorithm/')%添加算法路径
warning off;
%% 三维路径规划模型定义
global startPos goalPos N
N=2;%待优化点的个数(可以修改)
startPos = [10, 10, 80]; %起点(可以修改)
goalPos = [80, 90, 150]; %终点(可以修改)
SearchAgents_no=30; % 种群大小(可以修改)
Function_name='F1'; %F1:随机产生地图 F2:导入固定地图
Max_iteration=50; %最大迭代次数(可以修改)
% Load details of the selected benchmark function
[lb,ub,dim,fobj]=Get_Functions_details(Function_name);
[Best_score,Best_pos,curve]=GOA(SearchAgents_no,Max_iteration,lb,ub,dim,fobj);%算法优化求解
AlgorithmName='GOA';%算法名字
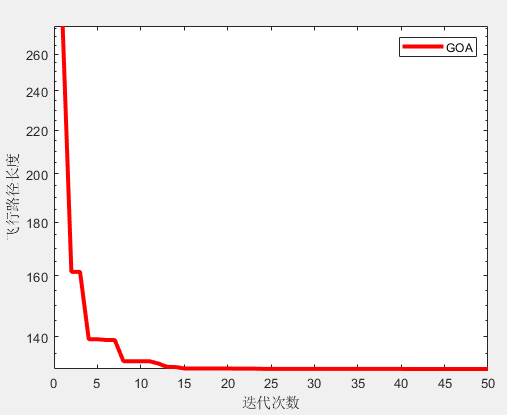
figure
semilogy(curve,'Color','r','linewidth',3)
xlabel('迭代次数');
ylabel('飞行路径长度');
legend(AlgorithmName)
display(['算法得到的最优适应度: ', num2str(Best_score)]);
Position=[Best_pos(1:dim/3); Best_pos(1+dim/3:2*(dim/3)); Best_pos(1+(2*dim/3):end)]'; %优化点的XYZ坐标(每一行是一个点)
plotFigure(Best_pos,AlgorithmName)%画最优路径
(2)部分结果
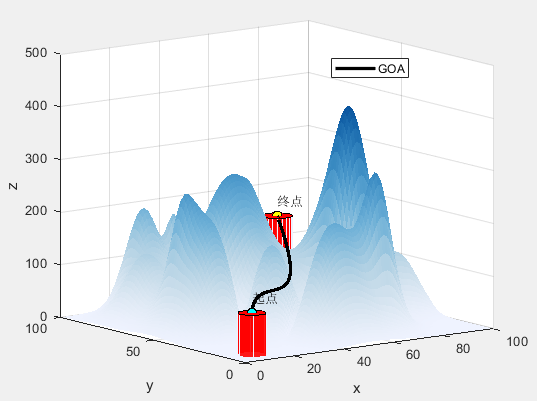
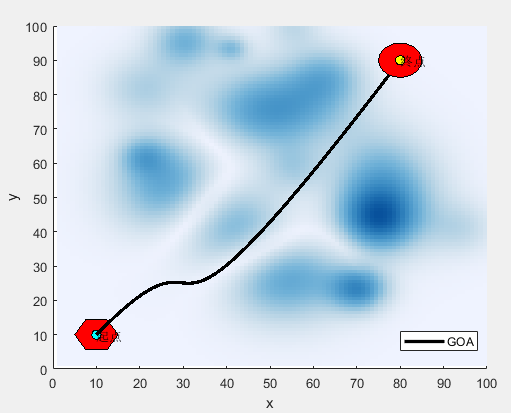
无人机飞行路径坐标:
1.0000000e+01 1.0000000e+01 8.0000000e+011.1195509e+01 1.1522382e+01 8.1134937e+011.2336219e+01 1.2941987e+01 8.2210564e+011.3423955e+01 1.4262310e+01 8.3228946e+011.4460544e+01 1.5486846e+01 8.4192142e+011.5447811e+01 1.6619089e+01 8.5102217e+011.6387583e+01 1.7662536e+01 8.5961231e+011.7281684e+01 1.8620681e+01 8.6771246e+011.8131942e+01 1.9497019e+01 8.7534326e+011.8940182e+01 2.0295045e+01 8.8252532e+011.9708230e+01 2.1018255e+01 8.8927926e+012.0437912e+01 2.1670143e+01 8.9562570e+012.1131053e+01 2.2254205e+01 9.0158527e+012.1789480e+01 2.2773936e+01 9.0717858e+012.2415019e+01 2.3232830e+01 9.1242626e+012.3009496e+01 2.3634383e+01 9.1734893e+012.3574735e+01 2.3982091e+01 9.2196721e+012.4112565e+01 2.4279447e+01 9.2630172e+012.4624809e+01 2.4529948e+01 9.3037307e+012.5113295e+01 2.4737088e+01 9.3420191e+012.5579848e+01 2.4904362e+01 9.3780883e+012.6026294e+01 2.5035266e+01 9.4121447e+012.6454458e+01 2.5133295e+01 9.4443945e+012.6866168e+01 2.5201943e+01 9.4750438e+012.7263249e+01 2.5244706e+01 9.5042989e+012.7647526e+01 2.5265079e+01 9.5323660e+012.8020826e+01 2.5266557e+01 9.5594514e+012.8384974e+01 2.5252635e+01 9.5857611e+012.8741797e+01 2.5226808e+01 9.6115015e+012.9093120e+01 2.5192572e+01 9.6368787e+012.9440769e+01 2.5153420e+01 9.6620990e+012.9786571e+01 2.5112850e+01 9.6873686e+013.0132351e+01 2.5074355e+01 9.7128936e+013.0479935e+01 2.5041430e+01 9.7388803e+013.0831149e+01 2.5017571e+01 9.7655350e+013.1187818e+01 2.5006274e+01 9.7930637e+013.1551770e+01 2.5011032e+01 9.8216728e+013.1924829e+01 2.5035341e+01 9.8515684e+013.2308821e+01 2.5082696e+01 9.8829568e+013.2705574e+01 2.5156593e+01 9.9160441e+013.3116912e+01 2.5260526e+01 9.9510366e+013.3544661e+01 2.5397990e+01 9.9881405e+013.3990647e+01 2.5572481e+01 1.0027562e+023.4456697e+01 2.5787494e+01 1.0069507e+023.4944635e+01 2.6046523e+01 1.0114183e+023.5456289e+01 2.6353064e+01 1.0161794e+023.5993484e+01 2.6710612e+01 1.0212548e+023.6558045e+01 2.7122662e+01 1.0266651e+023.7151799e+01 2.7592710e+01 1.0324308e+023.7776572e+01 2.8124249e+01 1.0385727e+023.8434190e+01 2.8720776e+01 1.0451113e+023.9126478e+01 2.9385785e+01 1.0520672e+023.9855263e+01 3.0122772e+01 1.0594611e+024.0622370e+01 3.0935231e+01 1.0673137e+024.1429625e+01 3.1826658e+01 1.0756454e+024.2278854e+01 3.2800548e+01 1.0844769e+024.3171884e+01 3.3860396e+01 1.0938289e+024.4110539e+01 3.5009697e+01 1.1037220e+024.5096647e+01 3.6251945e+01 1.1141768e+024.6132032e+01 3.7590637e+01 1.1252139e+024.7218521e+01 3.9029268e+01 1.1368540e+024.8357940e+01 4.0571332e+01 1.1491176e+024.9552115e+01 4.2220324e+01 1.1620254e+025.0802871e+01 4.3979740e+01 1.1755980e+025.2112034e+01 4.5853074e+01 1.1898560e+025.3481431e+01 4.7843822e+01 1.2048201e+025.4912887e+01 4.9955480e+01 1.2205109e+025.6408228e+01 5.2191541e+01 1.2369489e+025.7969280e+01 5.4555501e+01 1.2541548e+025.9597869e+01 5.7050855e+01 1.2721493e+026.1295822e+01 5.9681099e+01 1.2909529e+026.3064963e+01 6.2449727e+01 1.3105863e+026.4907119e+01 6.5360235e+01 1.3310701e+026.6824115e+01 6.8416117e+01 1.3524250e+026.8817778e+01 7.1620868e+01 1.3746714e+027.0889934e+01 7.4977985e+01 1.3978301e+027.3042408e+01 7.8490961e+01 1.4219217e+027.5277026e+01 8.2163292e+01 1.4469668e+027.7595615e+01 8.5998474e+01 1.4729860e+028.0000000e+01 9.0000000e+01 1.5000000e+02
四、完整MATLAB代码
这篇关于(一)基于高尔夫优化算法GOA求解无人机三维路径规划研究(MATLAB)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!


