本文主要是介绍【古月居《ros入门21讲》学习笔记】14_参数的使用与编程方法,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
说明:
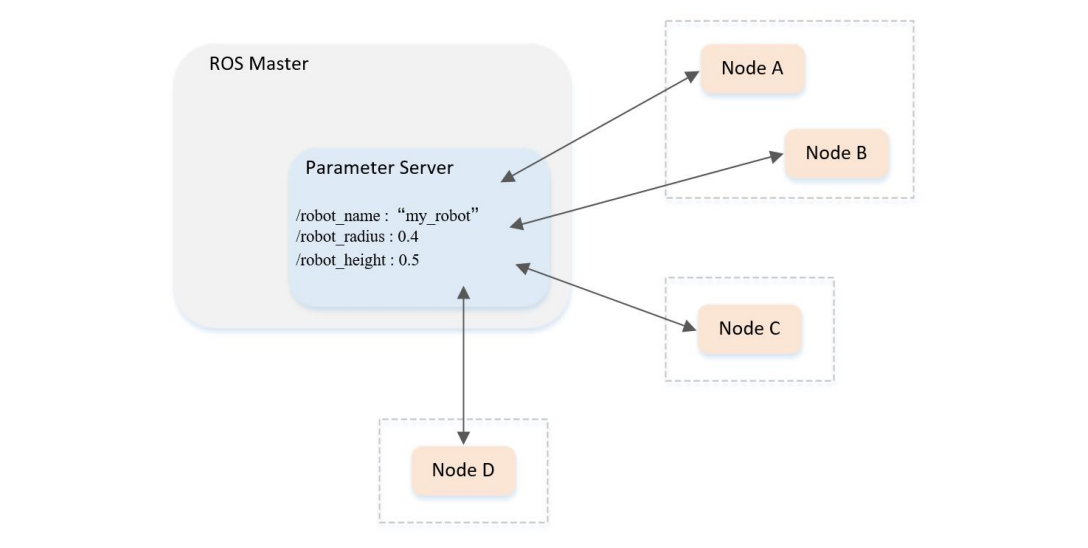
1. 参数模型(全局字典)
2. 实现过程(C++)
创建功能包
参数命令行的使用
YAML参数文件
rosparam命令
使用示例
编程方法(C++)
配置代码编译规则
编译并运行
编译
运行
3. 实现过程(Python)
编程方法(Python)
运行效果
说明:
1. 本系列学习笔记基于B站:古月居《ROS入门21讲》课程,且使用的Ubuntu与ROS系统版本与课程完全一致;
| 虚拟机版本 | Linux系统版本 | ROS系统版本 |
|---|---|---|
| VMware WorkStation Pro 16 | Ubuntu18.04 | Melodic |
2. 课程中的所有示例代码均已跑通,且对Pyhon版本的代码也都做了运行验证,并附带验证过程(错误均已修正);
3. 本节是整个笔记的第14节,对应视频课程的第16节,请自行对应学习;
4. 整个系列笔记基本已经完结,但部分章节仍需润色修改 ,后面会陆续发布,请大家持续关注, 创作不易,感谢支持!
1. 参数模型(全局字典)
2. 实现过程(C++)
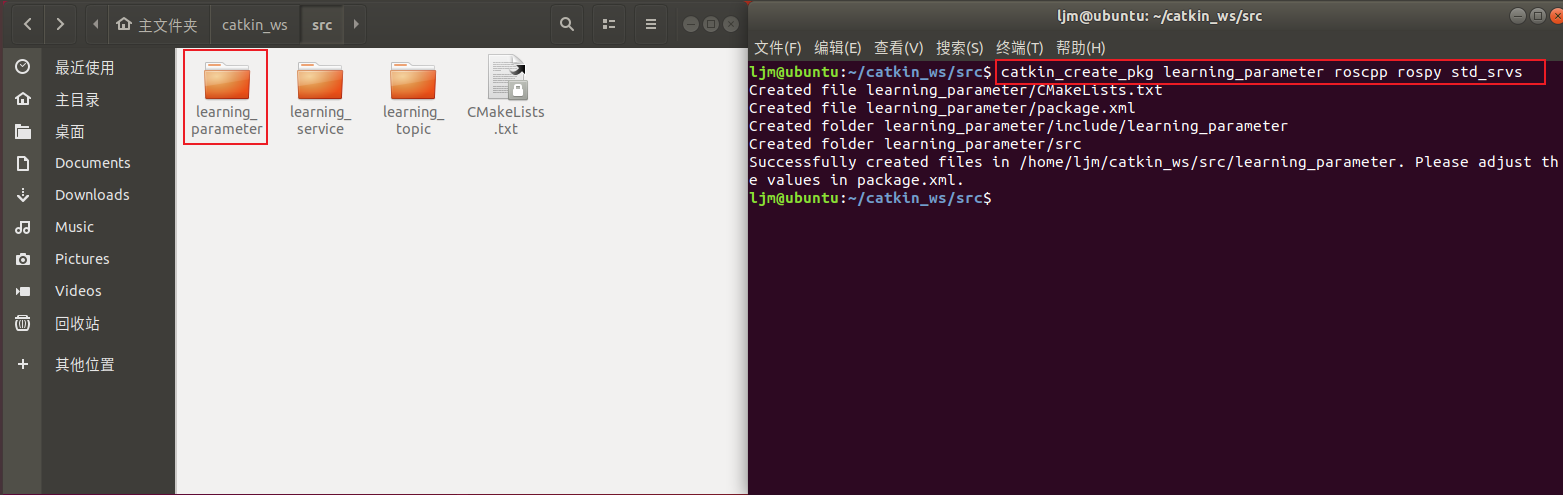
创建功能包
cd ~/catkin_ws/src catkin_create_pkg learning_parameter roscpp rospy std_srvs
参数命令行的使用
YAML参数文件
rosparam命令
-
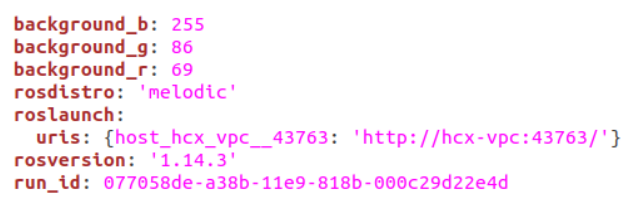
列出当前所有参数
rosparam list
-
显示某个参数值
rosparam get param_key
-
设置某个参数值
rosparam set param_key param_value
-
保存参数到文件
rosparam dump file_name
-
从文件读取参数
rosparam load file_name
-
删除参数
rosparam delete param_key
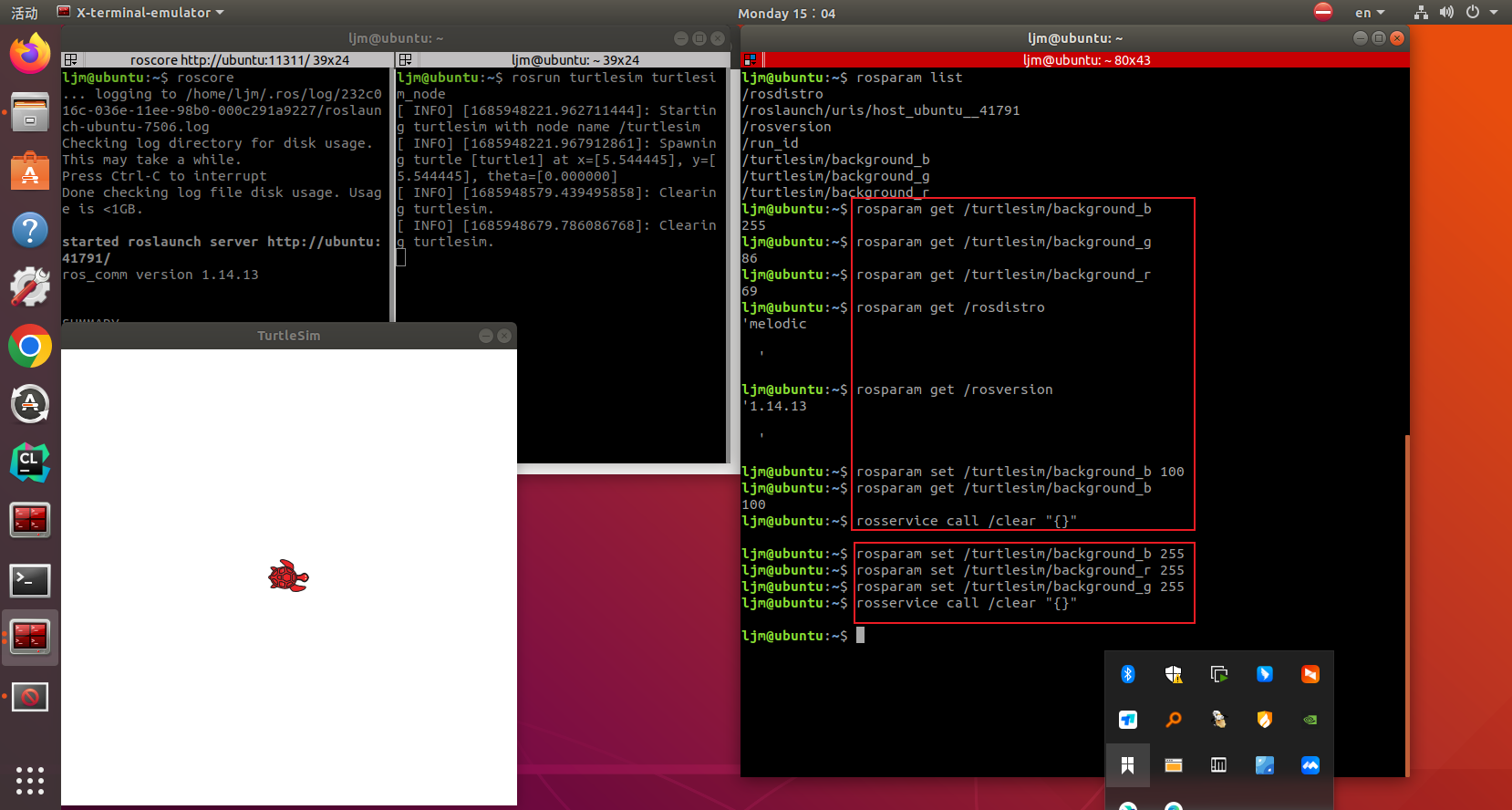
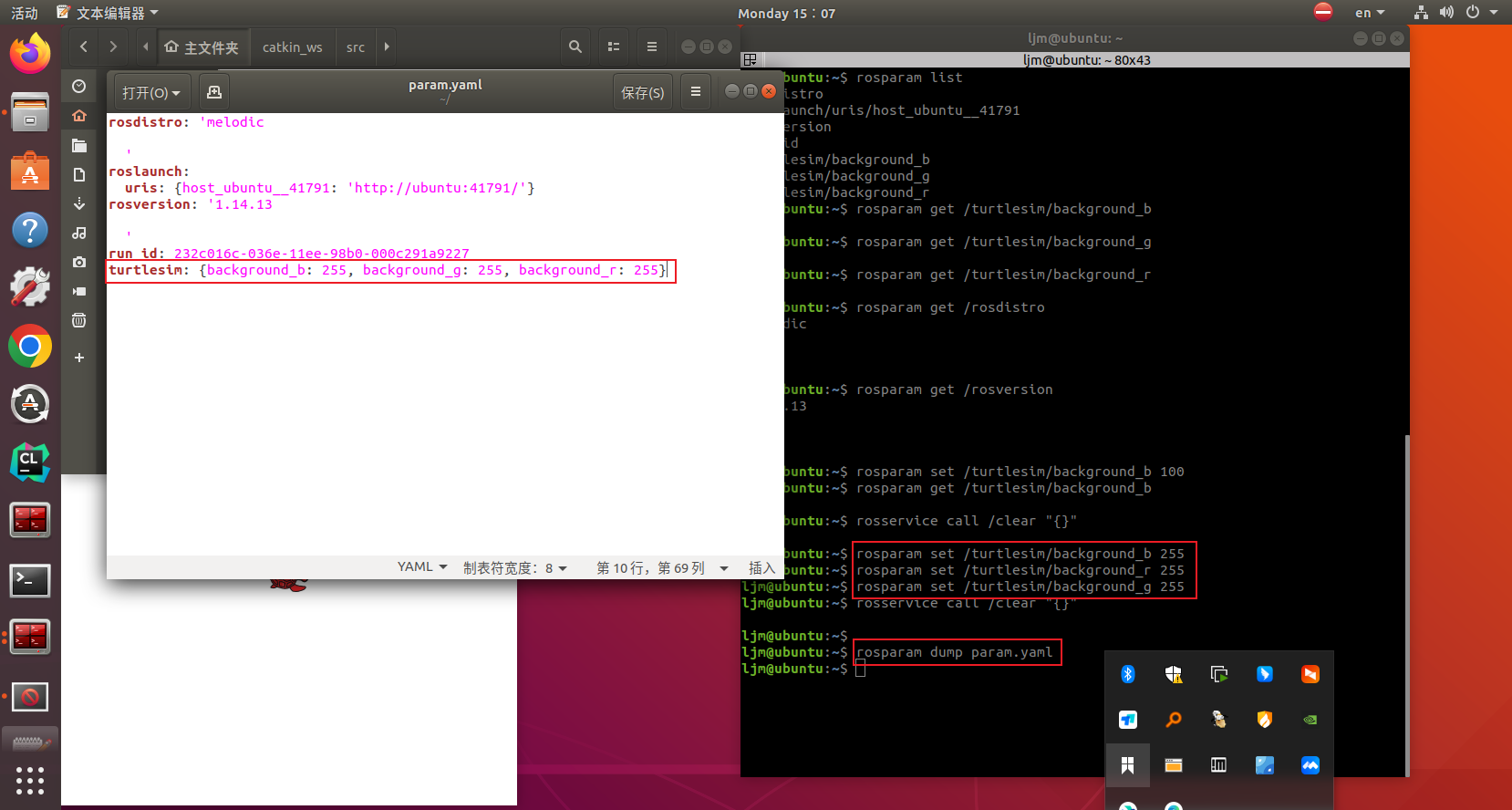
使用示例
显示与设置某个参数
保存当前参数到某个文件(文件路径就在当前终端的工作路径)
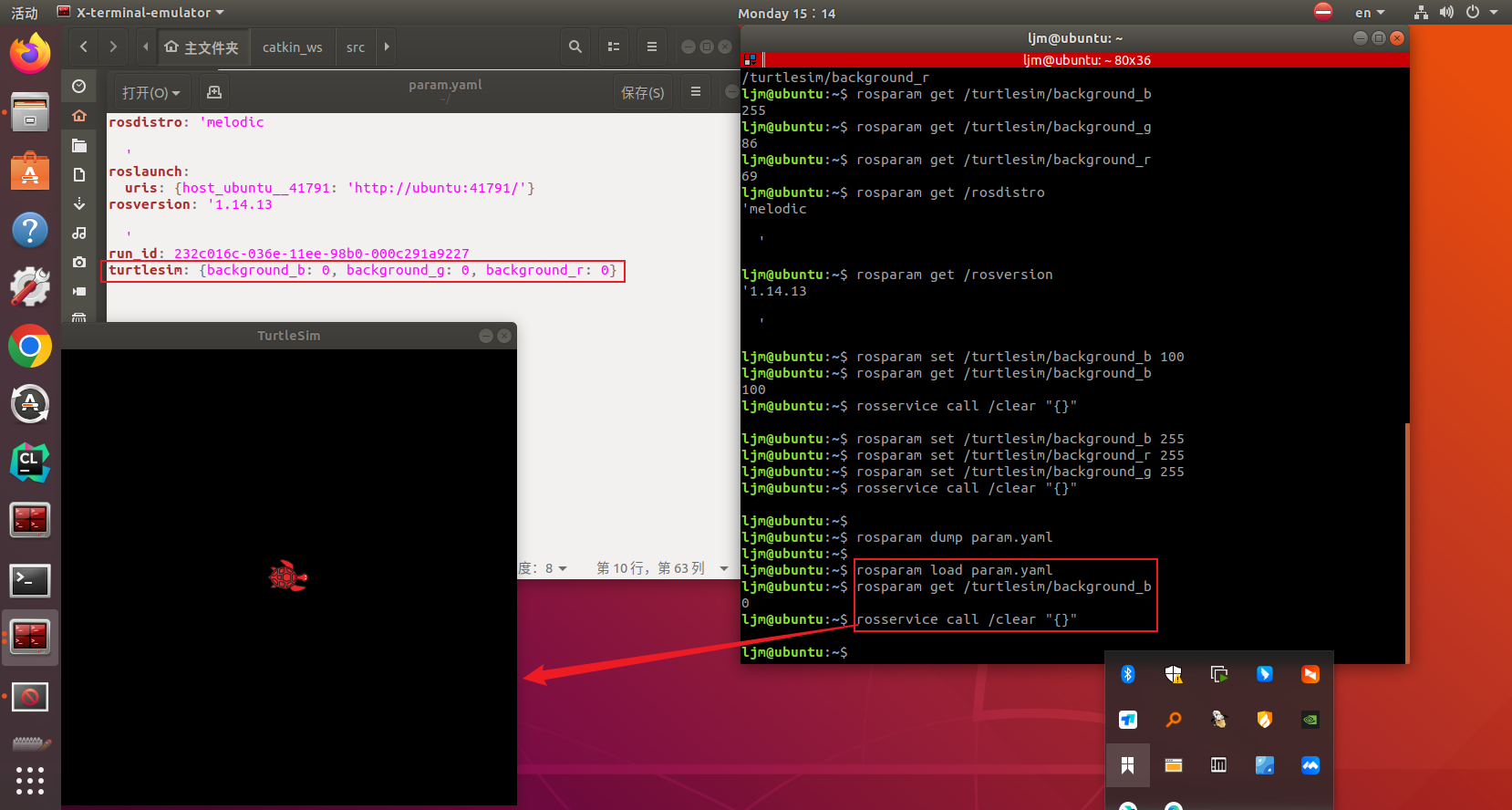
从文件中修改并读取参数
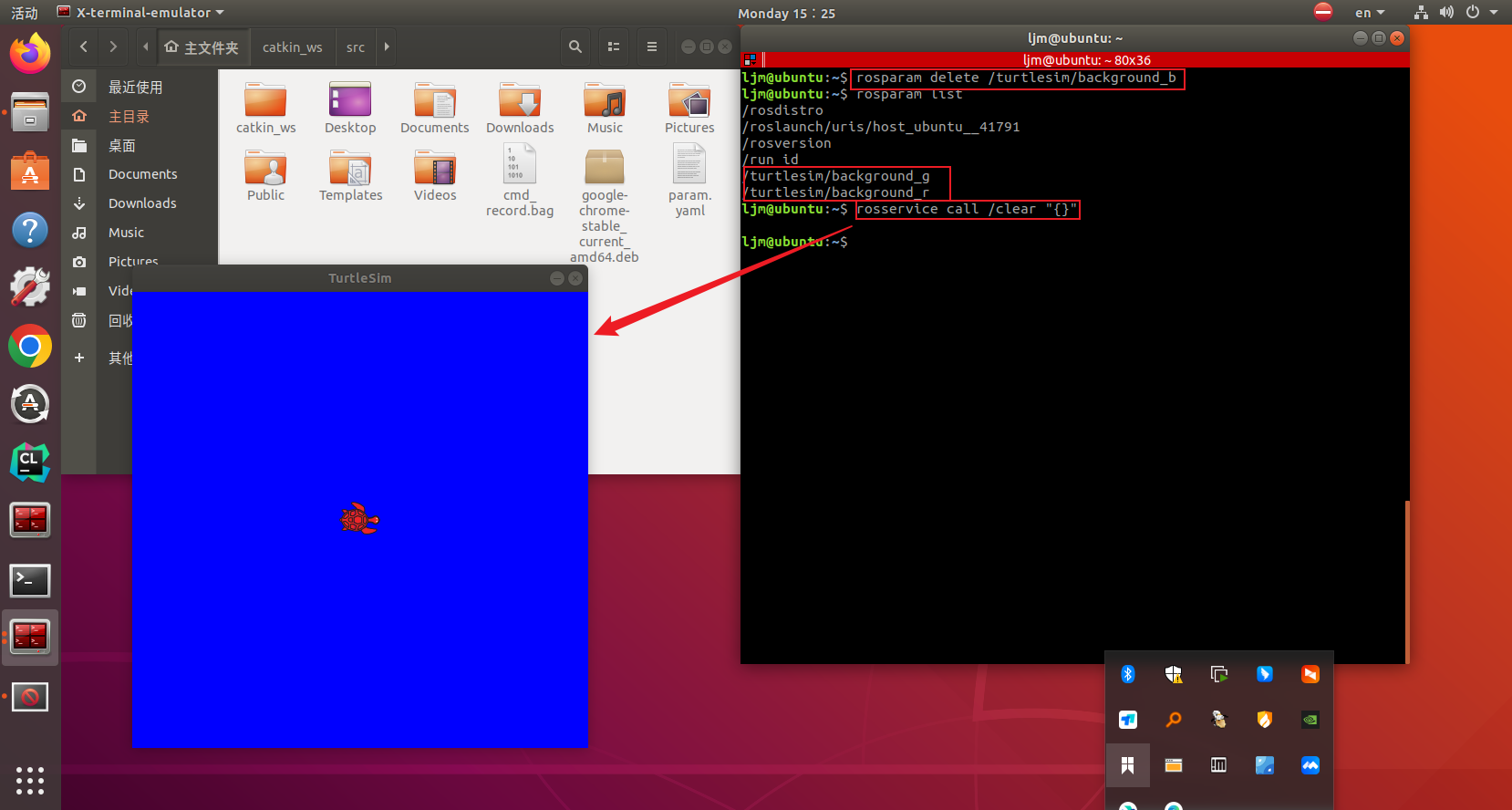
删除某个参数
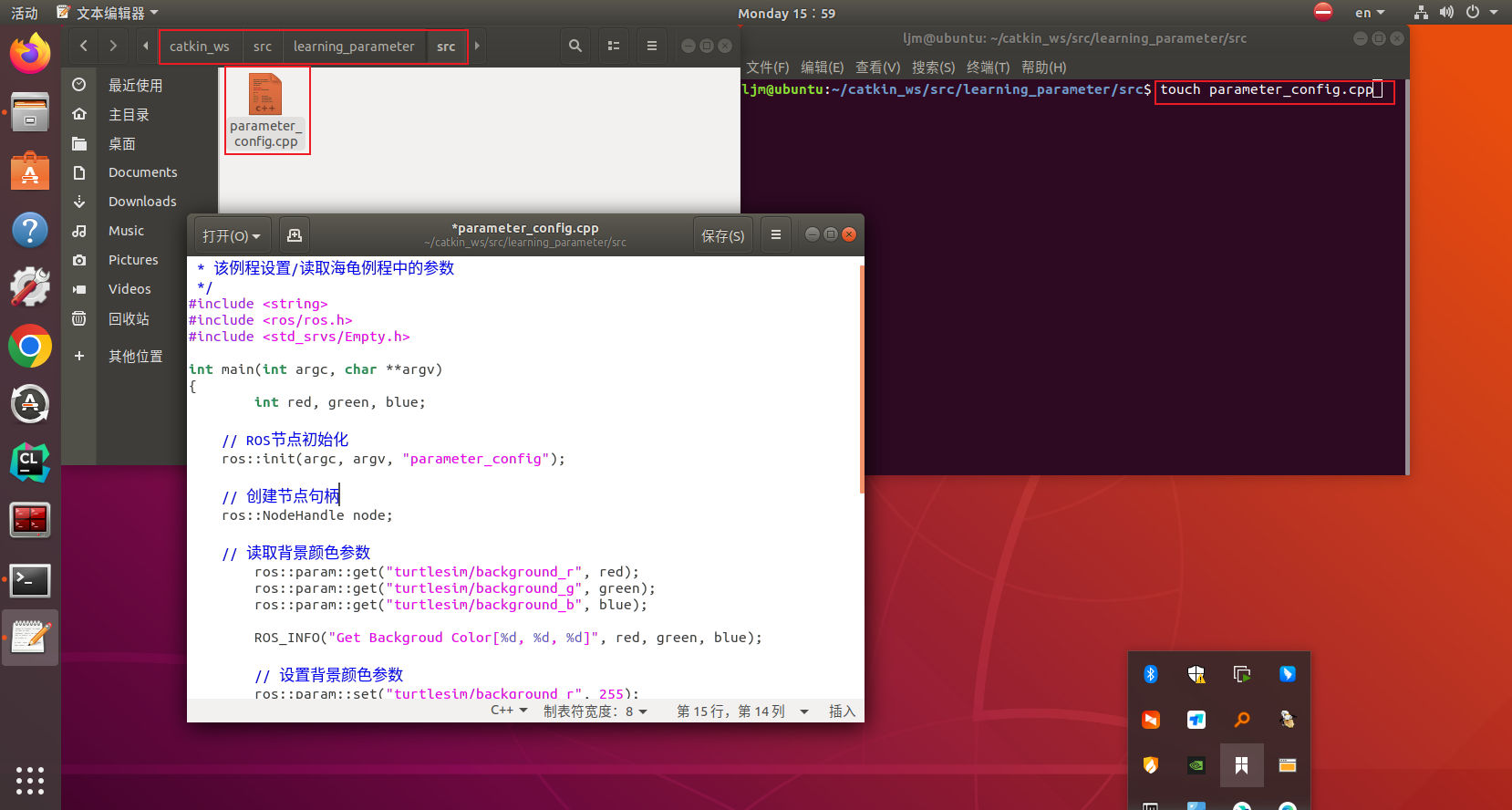
编程方法(C++)
cd ~/catkin_ws/src/learning_parameter/src touch parameter_config.cpp
-
初始化ROS节点;
-
get函数获取参数;
-
set函数设置参数
/*** 该例程设置/读取海龟例程中的参数*/
#include <string>
#include <ros/ros.h>
#include <std_srvs/Empty.h>
int main(int argc, char **argv)
{int red, green, blue;
// ROS节点初始化ros::init(argc, argv, "parameter_config");
// 创建节点句柄ros::NodeHandle node;
// 读取背景颜色参数ros::param::get("turtlesim/background_r", red);ros::param::get("turtlesim/background_g", green);ros::param::get("turtlesim/background_b", blue);
ROS_INFO("Get Backgroud Color[%d, %d, %d]", red, green, blue);
// 设置背景颜色参数ros::param::set("turtlesim/background_r", 255);ros::param::set("turtlesim/background_g", 255);ros::param::set("/background_b", 255);
ROS_INFO("Set Backgroud Color[255, 255, 255]");
// 读取背景颜色参数ros::param::get("turtlesim/background_r", red);ros::param::get("turtlesim/background_g", green);ros::param::get("turtlesim/background_b", blue);
ROS_INFO("Re-get Backgroud Color[%d, %d, %d]", red, green, blue);
// 调用服务,刷新背景颜色ros::service::waitForService("/clear");ros::ServiceClient clear_background = node.serviceClient<std_srvs::Empty>("/clear");std_srvs::Empty srv;clear_background.call(srv);sleep(1);
return 0;
}
配置代码编译规则
add_executable(parameter_config src/parameter_config.cpp)
target_link_libraries(parameter_config ${catkin_LIBRARIES})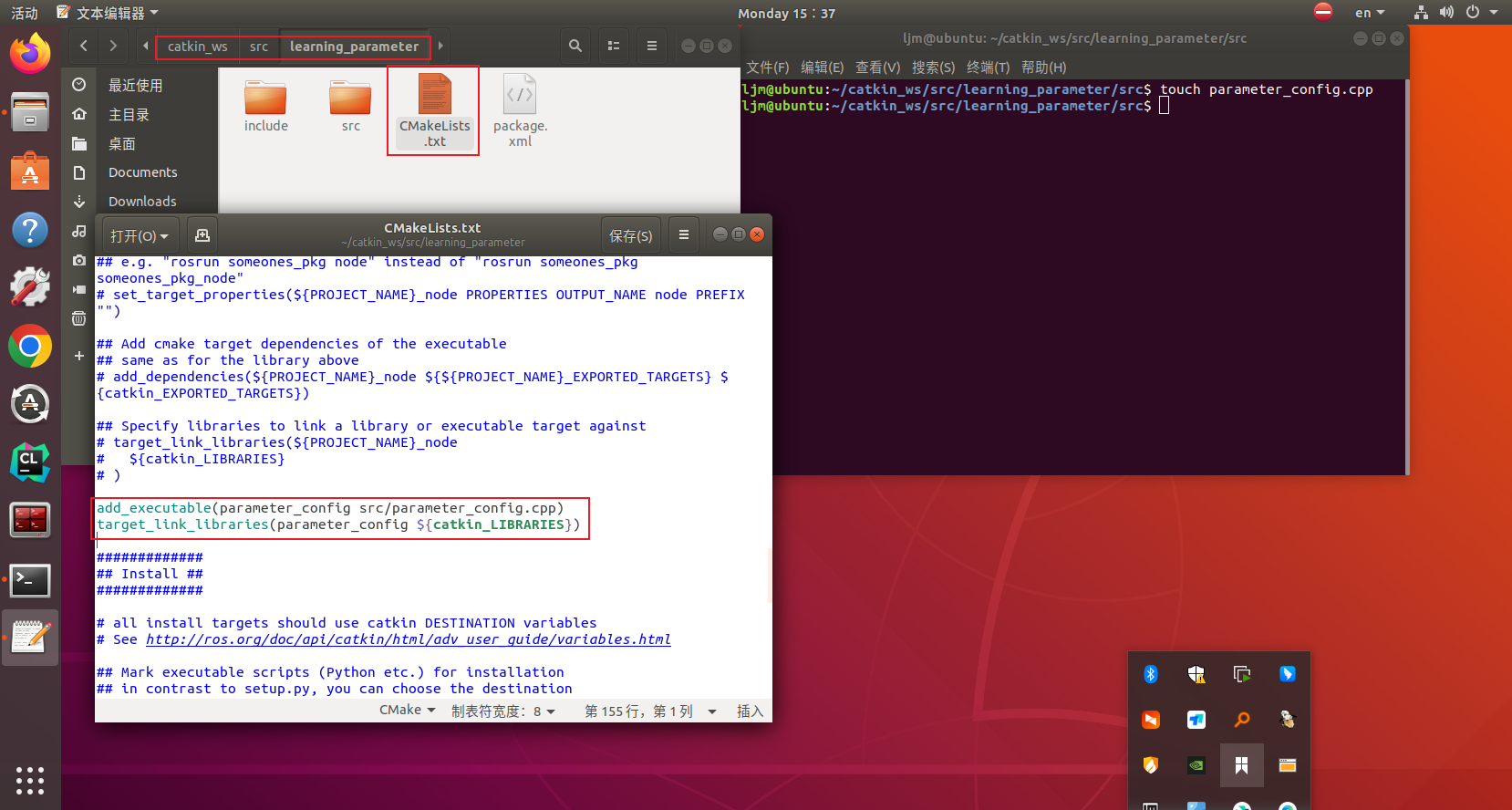
编译并运行
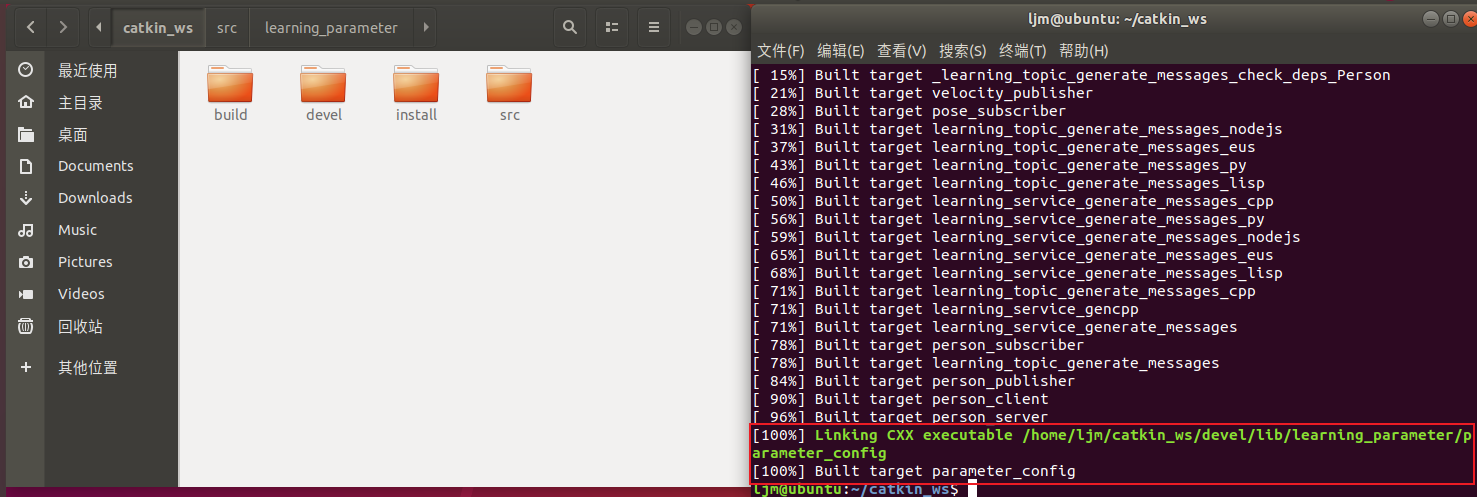
编译
cd ~/catkin_ws catkin_make source devel/setup.bash(如已配置 **.bashrc**文件,则此步不需要,配置方法在publisher的章节里)
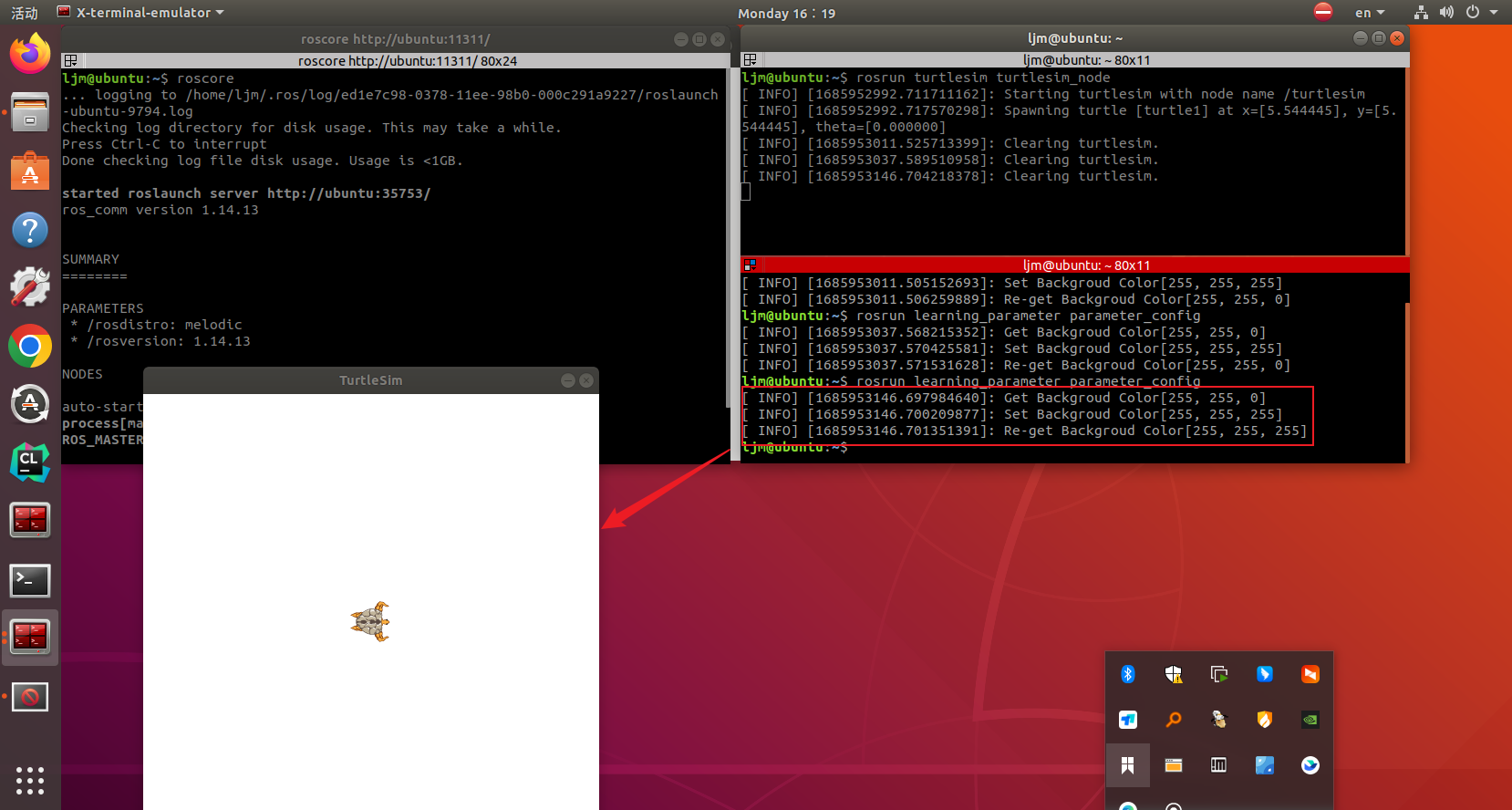
运行
roscore rosrun turtlesim turtlesim_node rosrun learning_parameter parameter_config
3. 实现过程(Python)
编程方法(Python)
cd ~/catkin_ws/src/learning_parameter mkdir scripts cd scripts touch parameter_config.py
#!/usr/bin/env python
# -*- coding: utf-8 -*-
# 该例程设置/读取海龟例程中的参数
import sys
import rospy
from std_srvs.srv import Empty
def parameter_config():# ROS节点初始化rospy.init_node('parameter_config', anonymous=True)
# 读取背景颜色参数red = rospy.get_param('turtlesim/background_r')green = rospy.get_param('turtlesim/background_g')blue = rospy.get_param('turtlesim/background_b')
rospy.loginfo("Get Backgroud Color[%d, %d, %d]", red, green, blue)
# 设置背景颜色参数rospy.set_param("turtlesim/background_r", 255);rospy.set_param("turtlesim/background_g", 255);rospy.set_param("turtlesim/background_b", 100);
rospy.loginfo("Set Backgroud Color[255, 255, 100]");
# 读取背景颜色参数red = rospy.get_param('turtlesim/background_r')green = rospy.get_param('turtlesim/background_g')blue = rospy.get_param('turtlesim/background_b')
rospy.loginfo("Get Backgroud Color[%d, %d, %d]", red, green, blue)
# 发现/spawn服务后,创建一个服务客户端,连接名为/spawn的servicerospy.wait_for_service('/clear')try:clear_background = rospy.ServiceProxy('/clear', Empty)
# 请求服务调用,输入请求数据response = clear_background()return responseexcept rospy.ServiceException, e:print "Service call failed: %s"%e
if __name__ == "__main__":parameter_config()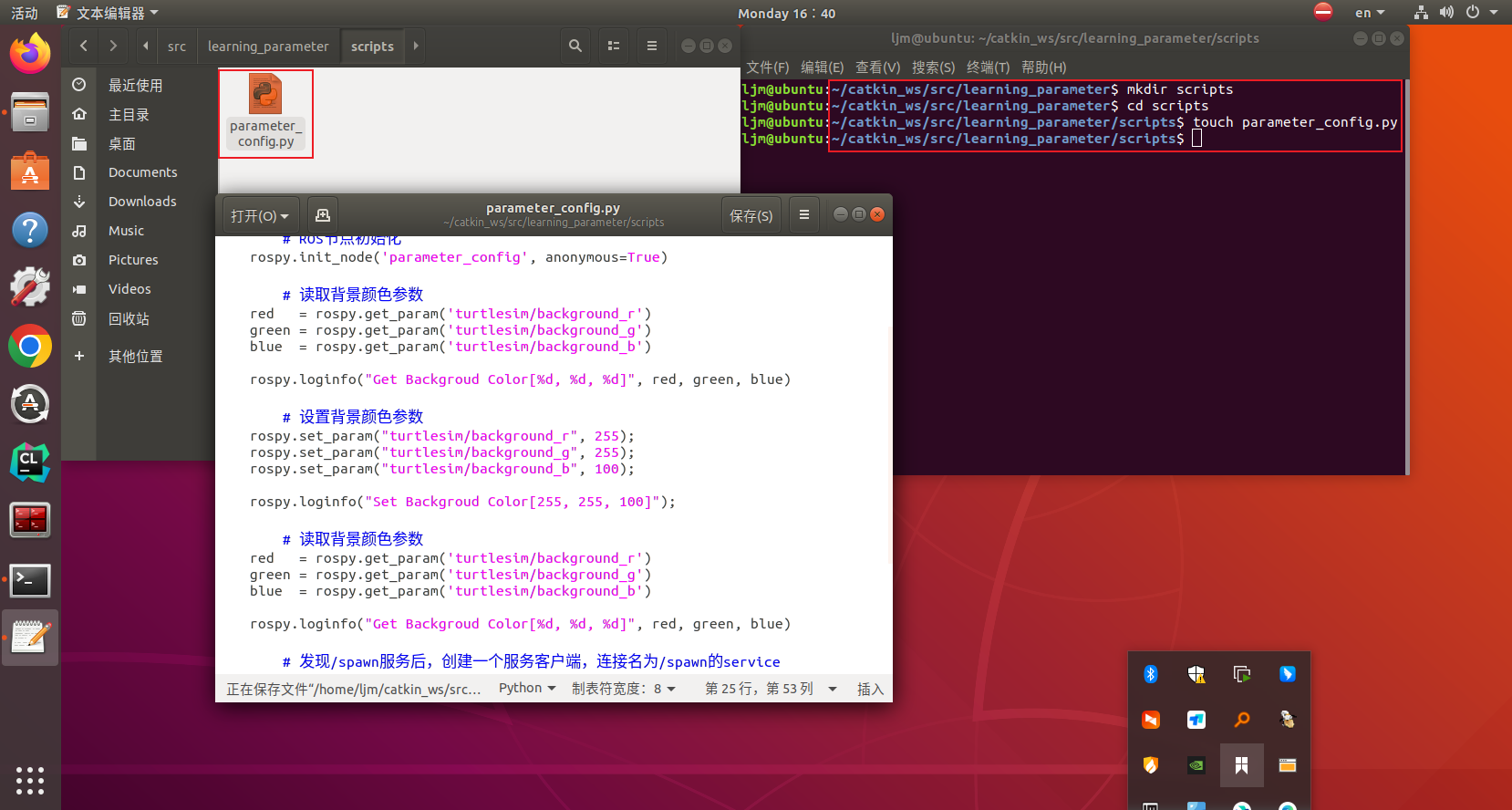
给parameter_config.py文件赋作为可执行文件权限,python文件不需要编译,直接运行即可。

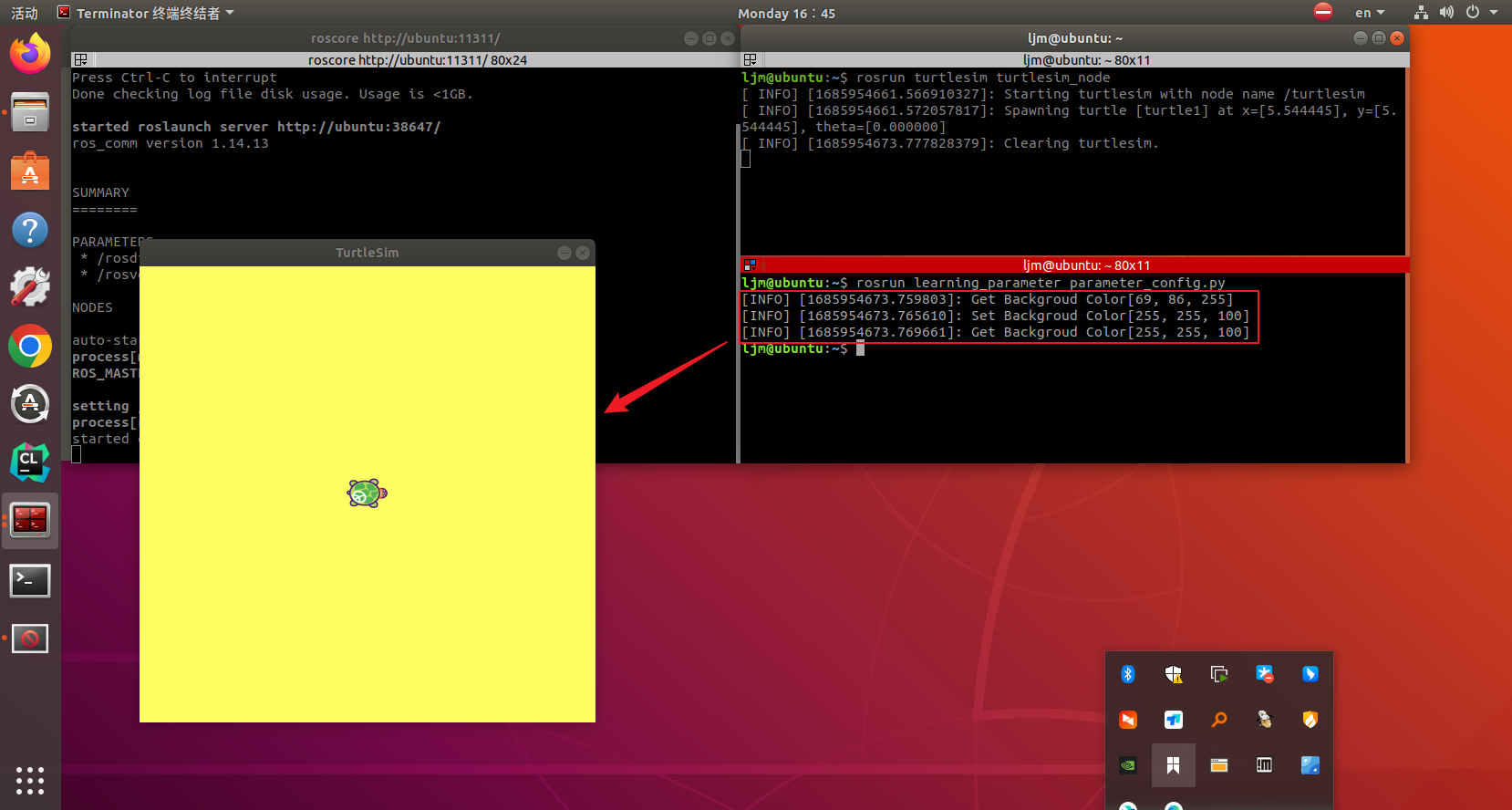
运行效果
roscore rosrun turtlesim turtlesim_node rosrun learning_parameter parameter_config.py
这篇关于【古月居《ros入门21讲》学习笔记】14_参数的使用与编程方法的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





