本文主要是介绍02 RANSAC算法 及 Python 实现,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 02 RANSAC算法 及 Python 实现
- 2.1 简介
- 2.2 算法流程
- 2.3 RANSAC 算法实现直线拟合
- 2.4 利用 RANSAC 算法减少 ORB 特征点误匹配
02 RANSAC算法 及 Python 实现
2.1 简介
RANSAC (Random Sample Consensus,随机抽样一致)算法的 基本假设 是样本中包含正确数据(inliers即内点,可以被模型描述的数据),也包含异常数据(outliers 即外点,偏离正常范围很远、无法适应数学模型的数据),也就是说数据集中含有噪声。
我们的目的就是找出 使内点最多的模型参数(类似最小二乘法,最小二乘法试图找到满足所有点的参数,而 RANSAC 是为了消除误匹配,尽量找到更多内点,去除外点)。
2.2 算法流程
RANSAC 是通过反复选择数据集去估计出模型参数,一直迭代到估计出认为比较好的模型。
具体的实现步骤可以分为以下几步:
(1)选择出可以估计出模型的最小数据集;(对于直线拟合来说就是两个点,对于计算单应矩阵就是 4 个点);
(2)使用这个最小数据集计算出模型参数;
(3)将所有数据带入这个模型,计算并记录“内点”的数目(在误差允许范围内的点的数目);
(4)与之前记录的最好模型的“内点”数量进行比较,若表现更好,则将此模型更新为最优模型;
(5)重复以上步骤,直至达到最大迭代次数或“内点”数量满足要求。
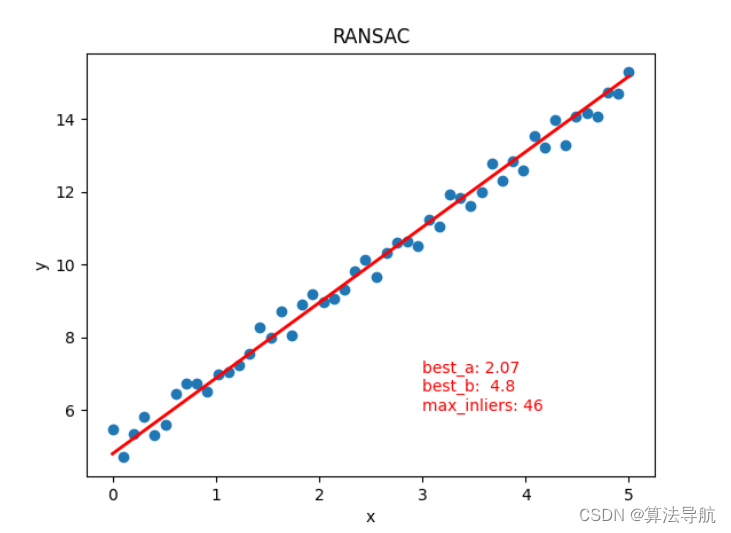
2.3 RANSAC 算法实现直线拟合
# @Time : 2022/11/7 20:11
# @Author : xiao cong
# @Function : RANSAC 算法实现直线拟合import numpy as np
import matplotlib.pyplot as plt
import randomITERS = 1000 # 最大迭代次数
SIZE = 50 # 样本数量
RATIO = 0.6 # 期望为内点的比例
INLIERS = SIZE * RATIO # 内点# 生成样本数据
X = np.linspace(0, 5, SIZE)
Y = 2 * X + 5
for index in range(SIZE):sigma = np.random.uniform(-0.5, 0.5) # 生成高斯噪声Y[index] += sigma# 绘散点图
plt.figure()
plt.scatter(X, Y)
plt.xlabel("x")
plt.ylabel("y")# 使用 RANSAC 算法估算模型
iter = 0 # 迭代次数
max_inliers = 0 # 先前最多内点数量
best_a = 0 # 最优参数
best_b = 0
error = 0.5 # 允许最小误差while iter <= ITERS and max_inliers < INLIERS:# 随机选取两个点,计算模型参数random_index = random.sample(range(0, SIZE), 2) # 返回索引列表x1 = X[random_index[0]]y1 = Y[random_index[0]]x2 = X[random_index[1]]y2 = Y[random_index[1]]a = (y2 - y1) / (x2 - x1) # 斜率b = y1 - a * x1 # 截距inliers = 0 # 本次内点数量# 代入模型,计算内点数量for index in range(SIZE):y_estimate = a * X[index] + bif abs(Y[index] - y_estimate) <= error:inliers += 1if inliers >= max_inliers:best_a = abest_b = bmax_inliers = inliersiter += 1# 画出拟合直线
Y_estimate = best_a * X + best_b
plt.plot(X, Y_estimate, linewidth=2.0, color="r")
text = "best_a: " + str(round(best_a, 2)) + "\nbest_b: " + str(round(best_b, 2)) + \"\nmax_inliers: " + str(int(max_inliers))
plt.text(3, 6, text, fontdict={'size': 10, 'color': 'r'})
plt.title("RANSAC")
plt.show()
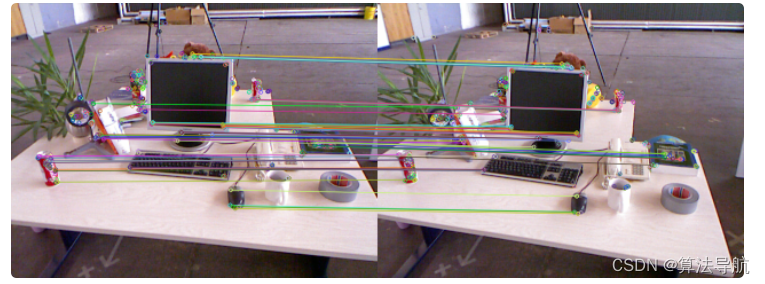
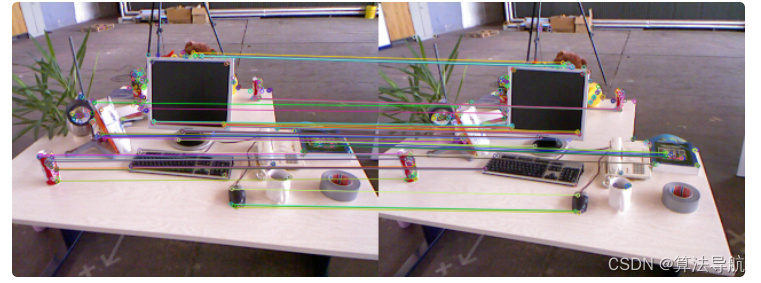
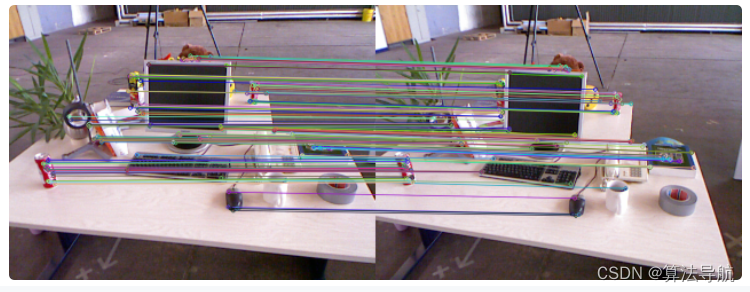
2.4 利用 RANSAC 算法减少 ORB 特征点误匹配
特征点匹配会有很多误匹配的点,所以求出基础矩阵 F \boldsymbol{F} F,用它来做更精准的匹配。这里以 ORB 为例,FAST 特征点就是 RANSAC 算法的数据样本。
由 对极约束,得到
p 2 T F p 1 = 0 \boldsymbol{p_2^{\mathrm{T}}}\boldsymbol{F}\boldsymbol{p_1}=0 p2TFp1=0
其中, p 1 \boldsymbol{p_1} p1、 p 2 \boldsymbol{p_2} p2 为匹配点的像素坐标 。
分别为 ORB_features.png*、all_matches.png、goodmatches.png、*after_RANSAC.png.

#include <iostream>
#include <opencv2/features2d.hpp>
#include <opencv2/opencv.hpp>using namespace std;
using namespace cv;int main()
{// 读取图像Mat img_01 = imread("/home/cong/slambook_code/test/img_01.png");Mat img_02 = imread("/home/cong/slambook_code/test/img_02.png");// 提取 ORB 特征点vector<KeyPoint> keypoints_01, keypoints_02; // FAST 特征点Mat descriptors_01, descriptors_02; // BRIEF 描述子Ptr<FeatureDetector> detector = ORB::create(); // 初始化Ptr<DescriptorExtractor> descriptor = ORB::create();Ptr<DescriptorMatcher> matcher = DescriptorMatcher::create("BruteForce-Hamming");//-- 第一步:检测 Oriented FAST 角点位置detector->detect(img_01, keypoints_01);detector->detect(img_02, keypoints_02);//-- 第二步:根据角点位置计算 BRIEF 描述子descriptor->compute(img_01, keypoints_01, descriptors_01);descriptor->compute(img_02, keypoints_02, descriptors_02);Mat outimg_01;drawKeypoints(img_01, keypoints_01, outimg_01, Scalar::all(-1), DrawMatchesFlags::DEFAULT);imwrite("ORB_features.png", outimg_01);imshow("ORB features", outimg_01);//-- 第三步:对两幅图像中的BRIEF描述子进行匹配,计算 Hamming 距离// matches 用来存储匹配点对的信息,包括//queryIdx:测试图像的特征点描述符的下标//trainIdx:样本图像的特征点描述符下标//distance:特征点描述子的欧式距离vector<DMatch> matches;matcher->match(descriptors_01, descriptors_02, matches);//-- 第四步:匹配点对筛选(距离过大的一对点将被认为误匹配)// 找出所有匹配之间的最小距离和最大距离, 即最相似的和最不相似的两组点之间的距离auto min_max = minmax_element(matches.begin(), matches.end(),[] (const DMatch &m1, const DMatch &m2) {return m1.distance < m2.distance;});double min_dist = min_max.first->distance;double max_dist = min_max.second->distance;//当描述子之间的距离大于两倍的最小距离时,即认为匹配有误.// 但有时候最小距离会非常小,设置一个经验值30作为下限.vector<DMatch> good_matches;for(int i = 0; i < descriptors_01.rows; i++){if(matches[i].distance <= max(2*min_dist, 30.0))good_matches.push_back(matches[i]);}//-- 第五步:绘制匹配结果Mat img_match;Mat img_goodmatch;drawMatches(img_01, keypoints_01, img_02, keypoints_02, matches, img_match);drawMatches(img_01, keypoints_01, img_02, keypoints_02, good_matches, img_goodmatch);imwrite("all_matches.png", img_match);imwrite("good_matches.png", img_goodmatch);imshow("all matches", img_match);imshow("good matches", img_goodmatch);/*******************************************************************/// 下面用 RANSAC 算法去除误匹配// 主要分为三个部分:// 1)根据matches将特征点对齐,将坐标转换为float类型// 2)使用求基础矩阵方法 findFundamentalMat,得到RansacStatus// 3)根据RansacStatus来将误匹配的点也即RansacStatus[i]=0的点删除// 1)根据 matches 将特征点对齐(也就是 使对应的一对特征点的下标相同)vector<KeyPoint> R_keypoint_01, R_keypoint_02; // 存储对应的特征点for(size_t i = 0; i < matches.size(); i++){R_keypoint_01.push_back(keypoints_01[matches[i].queryIdx]); // 存储img01中能与img02匹配的特征点的索引值R_keypoint_02.push_back(keypoints_02[matches[i].trainIdx]);}// 像素坐标转换成 floatvector<Point2f> p01, p02;for(size_t i = 0; i < matches.size(); i++){p01.push_back(R_keypoint_01[i].pt); // 坐标p02.push_back(R_keypoint_02[i].pt);}// 利用基础矩阵剔除误匹配点vector<uchar> RansacStatus;Mat Fundamental = findFundamentalMat(p01, p02, RansacStatus, FM_RANSAC);vector<KeyPoint> RR_keypoint_01, RR_keypoint_02;vector<DMatch> RR_matches; // 筛选后的匹配点int index = 0;for(size_t i = 0; i < matches.size(); i++){if(RansacStatus[i] != 0){RR_keypoint_01.push_back(R_keypoint_01[i]);RR_keypoint_02.push_back(R_keypoint_02[i]);matches[i].queryIdx = index;matches[i].trainIdx = index;RR_matches.push_back(matches[i]);index++;}}Mat img_RR_matches;drawMatches(img_01, RR_keypoint_01, img_02, RR_keypoint_02, RR_matches, img_RR_matches);imwrite("after_RANSAC.png", img_RR_matches);imshow("after RANSAC", img_RR_matches);waitKey(0);return 0;
}这篇关于02 RANSAC算法 及 Python 实现的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







