本文主要是介绍【HEVC学习与研究】33、编码一个CU(帧内部分)2:帧内预测各种模式的实现,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
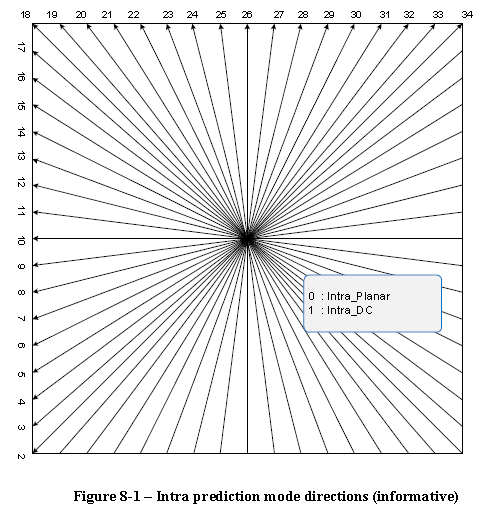
HEVC中一共定义了35中帧内编码预测模式,编号分别以0-34定义。其中模式0定义为平面模式(INTRA_PLANAR),模式1定义为均值模式(INTRA_DC),模式2~34定义为角度预测模式(INTRA_ANGULAR2~INTRA_ANGULAR34),分别代表了不同的角度。具体的示意图如标准文档的图8-1所示:
这三大类的预测方法均有实现的代码。首先看最简单的Intra_DC模式,该模式同角度预测模式实现在同一个函数Void TComPrediction::xPredIntraAng(...)中:
Void TComPrediction::xPredIntraAng(Int bitDepth, Int* pSrc, Int srcStride, Pel*& rpDst, Int dstStride, UInt width, UInt height, UInt dirMode, Bool blkAboveAvailable, Bool blkLeftAvailable, Bool bFilter )
{//......// Do the DC predictionif (modeDC){Pel dcval = predIntraGetPredValDC(pSrc, srcStride, width, height, blkAboveAvailable, blkLeftAvailable);for (k=0;k<blkSize;k++){for (l=0;l<blkSize;l++){pDst[k*dstStride+l] = dcval;}}}//......
}
Pel TComPrediction::predIntraGetPredValDC( Int* pSrc, Int iSrcStride, UInt iWidth, UInt iHeight, Bool bAbove, Bool bLeft )
{Int iInd, iSum = 0;Pel pDcVal;if (bAbove){for (iInd = 0;iInd < iWidth;iInd++){iSum += pSrc[iInd-iSrcStride];}}if (bLeft){for (iInd = 0;iInd < iHeight;iInd++){iSum += pSrc[iInd*iSrcStride-1];}}if (bAbove && bLeft){pDcVal = (iSum + iWidth) / (iWidth + iHeight);}else if (bAbove){pDcVal = (iSum + iWidth/2) / iWidth;}else if (bLeft){pDcVal = (iSum + iHeight/2) / iHeight;}else{pDcVal = pSrc[-1]; // Default DC value already calculated and placed in the prediction array if no neighbors are available}return pDcVal;
}第二种预测模式时平面模式,该模式定义在xPredIntraPlanar函数中。
Void TComPrediction::xPredIntraPlanar( Int* pSrc, Int srcStride, Pel* rpDst, Int dstStride, UInt width, UInt height )
{assert(width == height);Int k, l, bottomLeft, topRight;Int horPred;Int leftColumn[MAX_CU_SIZE], topRow[MAX_CU_SIZE], bottomRow[MAX_CU_SIZE], rightColumn[MAX_CU_SIZE];UInt blkSize = width;UInt offset2D = width;UInt shift1D = g_aucConvertToBit[ width ] + 2;UInt shift2D = shift1D + 1;// Get left and above reference column and rowfor(k=0;k<blkSize+1;k++){topRow[k] = pSrc[k-srcStride];leftColumn[k] = pSrc[k*srcStride-1];}// Prepare intermediate variables used in interpolationbottomLeft = leftColumn[blkSize];topRight = topRow[blkSize];for (k=0;k<blkSize;k++){bottomRow[k] = bottomLeft - topRow[k];rightColumn[k] = topRight - leftColumn[k];topRow[k] <<= shift1D;leftColumn[k] <<= shift1D;}// Generate prediction signalfor (k=0;k<blkSize;k++){horPred = leftColumn[k] + offset2D;for (l=0;l<blkSize;l++){horPred += rightColumn[k];topRow[l] += bottomRow[l];rpDst[k*dstStride+l] = ( (horPred + topRow[l]) >> shift2D );}}
}第三种预测模式,即mode=2~34时采用角度预测模式。实现的方式在xPredIntraAng中:
Void TComPrediction::xPredIntraAng(Int bitDepth, Int* pSrc, Int srcStride, Pel*& rpDst, Int dstStride, UInt width, UInt height, UInt dirMode, Bool blkAboveAvailable, Bool blkLeftAvailable, Bool bFilter )
{Int k,l;Int blkSize = width;Pel* pDst = rpDst;// Map the mode index to main prediction direction and angleassert( dirMode > 0 ); //no planarBool modeDC = dirMode < 2;Bool modeHor = !modeDC && (dirMode < 18);Bool modeVer = !modeDC && !modeHor;Int intraPredAngle = modeVer ? (Int)dirMode - VER_IDX : modeHor ? -((Int)dirMode - HOR_IDX) : 0;//计算当前模式同水平/垂直模式之间的角度差Int absAng = abs(intraPredAngle);Int signAng = intraPredAngle < 0 ? -1 : 1;// Set bitshifts and scale the angle parameter to block sizeInt angTable[9] = {0, 2, 5, 9, 13, 17, 21, 26, 32};Int invAngTable[9] = {0, 4096, 1638, 910, 630, 482, 390, 315, 256}; // (256 * 32) / AngleInt invAngle = invAngTable[absAng];absAng = angTable[absAng];intraPredAngle = signAng * absAng;// ......// Do angular predictionselse{Pel* refMain;Pel* refSide;Pel refAbove[2*MAX_CU_SIZE+1];Pel refLeft[2*MAX_CU_SIZE+1];// Initialise the Main and Left reference array.if (intraPredAngle < 0){for (k=0;k<blkSize+1;k++){refAbove[k+blkSize-1] = pSrc[k-srcStride-1];}for (k=0;k<blkSize+1;k++){refLeft[k+blkSize-1] = pSrc[(k-1)*srcStride-1];}refMain = (modeVer ? refAbove : refLeft) + (blkSize-1);refSide = (modeVer ? refLeft : refAbove) + (blkSize-1);// Extend the Main reference to the left.Int invAngleSum = 128; // rounding for (shift by 8)for (k=-1; k>blkSize*intraPredAngle>>5; k--){invAngleSum += invAngle;refMain[k] = refSide[invAngleSum>>8];}}else{for (k=0;k<2*blkSize+1;k++){refAbove[k] = pSrc[k-srcStride-1];}for (k=0;k<2*blkSize+1;k++){refLeft[k] = pSrc[(k-1)*srcStride-1];}refMain = modeVer ? refAbove : refLeft;refSide = modeVer ? refLeft : refAbove;}if (intraPredAngle == 0){for (k=0;k<blkSize;k++){for (l=0;l<blkSize;l++){pDst[k*dstStride+l] = refMain[l+1];}}if ( bFilter ){for (k=0;k<blkSize;k++){pDst[k*dstStride] = Clip3(0, (1<<bitDepth)-1, pDst[k*dstStride] + (( refSide[k+1] - refSide[0] ) >> 1) );}}}else{Int deltaPos=0;Int deltaInt;Int deltaFract;Int refMainIndex;for (k=0;k<blkSize;k++){deltaPos += intraPredAngle;deltaInt = deltaPos >> 5;deltaFract = deltaPos & (32 - 1);if (deltaFract){// Do linear filteringfor (l=0;l<blkSize;l++){refMainIndex = l+deltaInt+1;pDst[k*dstStride+l] = (Pel) ( ((32-deltaFract)*refMain[refMainIndex]+deltaFract*refMain[refMainIndex+1]+16) >> 5 );}}else{// Just copy the integer samplesfor (l=0;l<blkSize;l++){pDst[k*dstStride+l] = refMain[l+deltaInt+1];}}}}// Flip the block if this is the horizontal modeif (modeHor){Pel tmp;for (k=0;k<blkSize-1;k++){for (l=k+1;l<blkSize;l++){tmp = pDst[k*dstStride+l];pDst[k*dstStride+l] = pDst[l*dstStride+k];pDst[l*dstStride+k] = tmp;}}}}
}
除此之外,这个函数还实现了对小于16×16尺寸块实现滤波操作,以及水平模式时将预测矩阵进行转置操作。
大致上Intra预测块的生成方法就这样了,下一个问题在于,参考像素是如何来的?pSrc指针指向的数据又是如何获取的?且听下回。
这篇关于【HEVC学习与研究】33、编码一个CU(帧内部分)2:帧内预测各种模式的实现的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






