本文主要是介绍cs224w 图神经网络 学习笔记(七)Message Passing and Node Classification 信息传播与节点分类,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
课程链接:CS224W: Machine Learning with Graphs
课程视频:【课程】斯坦福 CS224W: 图机器学习 (2019 秋 | 英字)
目录
- 1. 前言
- 2. 图节点分类的思想——Collective classification
- 2.1 概述
- 2.2 Probabilistic Relational Classifier
- 2.3 Iterative classification
- 2.4 Loopy belief propagation 环路置信传播
1. 前言
这节课需要解决的问题是:Given a network with labels on some nodes, how do we assign labels to all other nodes in the network? 给定一个网络,网络上的部分节点打好了标签,如何给剩下的节点分配标签?——节点分类问题。

对于这个问题,我们从网络中的“相关性(Correlations)”开始。首先,先介绍图节点分类的思想——Collective classification,然后介绍三种分类的算法:
- Relational classification
- Iterative classification
- Belief propagation 置信度传播算法
节点分类被应用于很多领域,如:Document classification(文献分类)、Part of speech tagging(词性标注)、Link prediction(链路预测)、Optical character recognition(OCR识别)、Image/3D data segmentation (图像/三维数据分割)、Entity resolution in sensor networks、Spam and fraud detection(垃圾邮件和欺诈检测)等。
2. 图节点分类的思想——Collective classification
2.1 概述
Correlations exist in networks——网络中天生就存在关系。我们先从社交网络看起,个人行为和外部环境的影响是息息相关的,主要有以下三种类型的关系:
| Homophily 同质性 | Influence 影响型 | Confounding 混合型 |
|---|---|---|
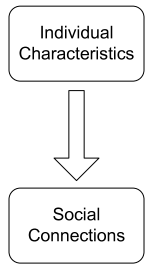 | 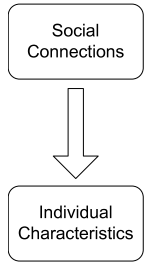 | 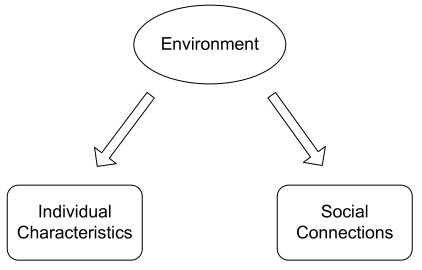 |
| 物以类聚,人以群分 | 橘生淮南则为橘,橘生淮北则为枳 | 时势造英雄,英雄造时势 |
对节点进行分类的一个很重要的想法就是:Guit-by-association——Similar nodes are typically close together or directly connected (相似的节点通常紧密相连或直接连接)。节点 O O O的标签(分类)取决于以下三个因素:
- Features of O O O 节点 O O O的特征
- Labels of the objects in O O O's neighborhood 节点 O O O的邻居节点的标签
- Features of the objects in O O O's neighborhood 节点 O O O的邻居节点的特征

因此,我们可以将问题进行更加数学化的描述:定义 n × n n \times n n×n矩阵 W W W为图 G G G的邻接矩阵;定义向量 Y = { − 1 , 0 , 1 } n Y=\{-1,0,1\}^n Y={−1,0,1}n表示 n n n个节点的标签,由于这里只考虑二分类问题, y i = 0 y_i=0 yi=0为unlabeled node,是待分类的节点, y i = 1 y_i=1 yi=1为positive node, y i = − 1 y_i=-1 yi=−1为negtive node。我们需要解决的问题就是unlabeled node中有多少个节点大概率是positive node。
我们引入Markov Assumption(马尔科夫假设)来描述这种内在联系的思想:
P ( Y i ∣ i ) = P ( Y i ∣ N i ) P(Y_i|i)=P(Y_i|N_i) P(Yi∣i)=P(Yi∣Ni)
那么,整个问题就转变成计算未知节点 i i i的标签为 Y i Y_i Yi的概率:

总的来说collective classification包括三个步骤:
(1)Local classifier——用于给节点分配初始标签
- 通过节点的属性/特点预测节点标签
- 是一个标准分类任务
- 因为没有用到网络信息,所以是“本地分类器”
(2)Relational Classifier——基于网络(结构)捕捉节点之间的关系
- 学习一个分类器,基于节点自身及其邻居节点的属性/特征对节点进行分类
- 在这一步会使用到网络的信息
(3)Collective Inference——通过网络传播相关性
- 将Relational Classifier迭代应用于每个节点,直到相邻节点的非一致性最小化为止
- 实质上,网络的结构会影响到最终的预测
需要说明的是,要精确地完成这些步骤进行推理一个NP难度的问题,只有在网络结构满足特定的条件时,才能得到最精确的结果。所以,在实际应用中,我们主要关注的是近似解法——Relational classifiers/ Iterative classification/ Belief propagation。这些算法都是迭代算法(iterative algorithms)。
2.2 Probabilistic Relational Classifier
基本思想:Class probability of Y i Y_i Yi is a weighted average of class probabilities of its neighbors. P ( Y i ) P(Y_i) P(Yi)是其邻居节点的标签为 Y i Y_i Yi的加权平均。对于已经有标签的节点,其 Y Y Y值就是其真实的标签;对于没有标签的节点,将其 Y Y Y值统一进行初始化。按随机顺序更新所有节点,直到收敛或达到最大迭代次数。
对每个节点 i i i及其标签 c c c,重复进行如下运算(加权平均,权重应该是表示邻居节点对其的影响):
P ( Y i = c ) = 1 ∑ ( i , j ) ∈ E W ( i , j ) ∑ ( i , j ) ∈ E W ( i , j ) P ( Y j = c ) P(Y_i=c)=\frac {1} {\sum_{(i,j) \in E}W(i,j)} \sum_{(i,j) \in E} W(i,j)P(Y_j=c) P(Yi=c)=∑(i,j)∈EW(i,j)1(i,j)∈E∑W(i,j)P(Yj=c)
其中 W ( i , j ) W(i,j) W(i,j)表示从节点 i i i到节点 j j j的权重。
下面通过一个例子来感受一下这个算法:
| 步骤 | 具体操作 | 例子 |
|---|---|---|
| 初始化 | 对于已经有标签的节点,其 Y Y Y值就是其真实的标签;对于没有标签的节点,将其 Y Y Y值统一进行初始化。 |  |
| 第一轮迭代 | 随机选择节点3, N 3 = { 1 , 2 , 4 } N_3=\{1,2,4\} N3={1,2,4},则 P ( Y = 1 P(Y=1 P(Y=1| N 3 ) = 1 3 ( 0 + 0 + 0.5 ) = 0.17 N_3)=\frac {1}{3}(0+0+0.5)=0.17 N3)=31(0+0+0.5)=0.17 |  |
| 第一轮迭代 | 随机选择节点4, N 4 = { 1 , 3 , 5 , 6 } N_4=\{1,3,5,6\} N4={1,3,5,6},需要注意的是此时节点3的 P ( Y = 1 ) = 0.17 P(Y=1)=0.17 P(Y=1)=0.17 |  |
| 第一轮迭代 | 随机选择节点5, N 5 = { 4 , 6 , 7 , 8 } N_5=\{4,6,7,8\} N5={4,6,7,8} |  |
| 第一轮迭代结束 |  | |
| 第二轮迭代结束 |  | |
| 第三轮迭代结束 |  | |
| 第四轮迭代结束 |  | |
| 五次迭代后,网络趋于稳定 |  |
不过,Probabilistic Relational Classifier算法有两个不足:第一,算法并不能保证收敛;第二,该算法模型并没有使用节点信息。
2.3 Iterative classification
基本思想
通过节点 i i i自身的属性及其邻居节点的标签来进行分类。首先,对每个节点 i i i,定义一个平面向量 α i \alpha_i αi;接着,训练一个基于向量 α i \alpha_i αi的分类器;每个节点都有不同数量的邻居,我们可以根据下面这些指标再进一步进行聚类(aggregate)——count (数量), mode(模式), proportion(比例),mean(均值), exists(存在性), 等等。
基本架构
(1)Bootstrap phase
- 将每个节点 i i i转换成平面向量 α i \alpha_i αi
- 使用局部分类器 f ( α i ) f(\alpha_i) f(αi)(例如SVM、kNN等)来得到 Y i Y_i Yi的最佳值
(2)Iteration phase——迭代直至收敛
- 对每个节点 i i i重复以下操作:更新节点向量 α i \alpha_i αi,根据局部分类器 f ( α i ) f(\alpha_i) f(αi)更新 Y i Y_i Yi的值。
- 迭代直到标签稳定或达到最大迭代次数
需要指出的是,Iterative classification算法同样不能保证收敛,一般会设置最大迭代次数最为迭代终止的条件。
2.4 Loopy belief propagation 环路置信传播
Belief Propagation 算法(BP算法)是将概率论应用到图结构中的一种动态规划的算法。在迭代过程中,相邻的节点相互交换“信息”(passing message)。当相邻节点“达成共识(When consensus is reached)”,计算最后的置信值(belief)。

BP算法解决的第一个任务就是传递信息(message passing),传递信息的一个原则是每个节点值接收或传递其邻居节点的信息。
| 图的样式 | 传递模式 |
|---|---|
| straight line graph(直线图),每个节点只接收传入的消息 |   |
| Tree(树结构),每个节点从树的所有分支接收信息 |  |
但是,这样的方法无法用于带环的图。
我们再来看一下信息传递的定义——节点 i i i给节点 j j j传递的信息取决于节点 i i i的所有邻居节点 k k k传递给节点 i i i的信息以及每个邻居节点 k k k对节点 i i i目前的置信状态的影响。
为此,我们定义以下符号:
- Label-label potential matrix ψ \psi ψ,表示节点与其邻居之间的依赖关系。 ψ ( Y i , Y j ) \psi_(Y_i,Y_j) ψ(Yi,Yj)为给定节点 i i i处的状态为 Y i Y_i Yi的情况下,节点 j j j处状态为 Y j Y_j Yj的可能性,即 P ( Y j ∣ Y i ) P(Y_j|Y_i) P(Yj∣Yi)。
- Prior belief ϕ \phi ϕ, ϕ i ( Y i ) \phi_i(Y_i) ϕi(Yi)表示节点 i i i处于状态 Y i Y_i Yi的可能性。
- m i → j ( Y i ) m_{i \to j}(Y_i) mi→j(Yi)表示节点 i i i对节点 j j j处于状态 Y j Y_j Yj的估计
- L \mathcal{L} L是所有状态的集合
Loopy BP算法的步骤如下:
(1)首先将所有的信息初始化为1。
(2)对每个节点重复以下操作:

m i → j ( Y i ) = α ∑ Y i ∈ L ψ ( Y i , Y j ) ϕ i ( Y i ) ∏ k ∈ N i ∖ j m k → i ( Y i ) m_{i \to j}(Y_i)=\alpha \sum_{Y_i \in \mathcal{L}} {\psi(Y_i,Y_j) \phi_i(Y_i) \prod_{k \in \mathcal{N}_i \setminus j}m_{k \to i}(Y_i)} mi→j(Yi)=αYi∈L∑ψ(Yi,Yj)ϕi(Yi)k∈Ni∖j∏mk→i(Yi)

(3)收敛后,可以通过下面这个式子计算节点 i i i处于状态 Y i Y_i Yi的置信度:

最后是Loopy BP算法的一些优缺点:

这篇关于cs224w 图神经网络 学习笔记(七)Message Passing and Node Classification 信息传播与节点分类的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



