本文主要是介绍单目深度估计: LDRN网络及代码讲解,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1. 介绍
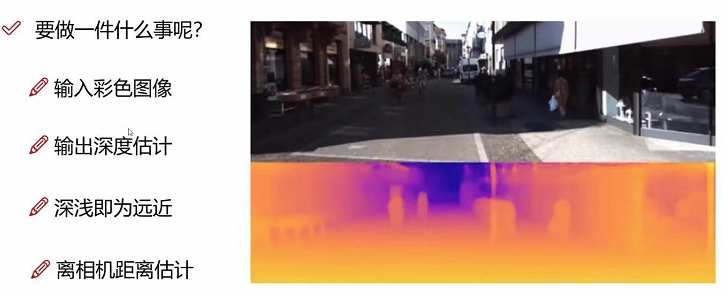
1.1 深度估计
深度估计:基于输入的彩色图像,输出图像每个像素的深度(离相机距离)信息。
1.2 深度估计应用场景
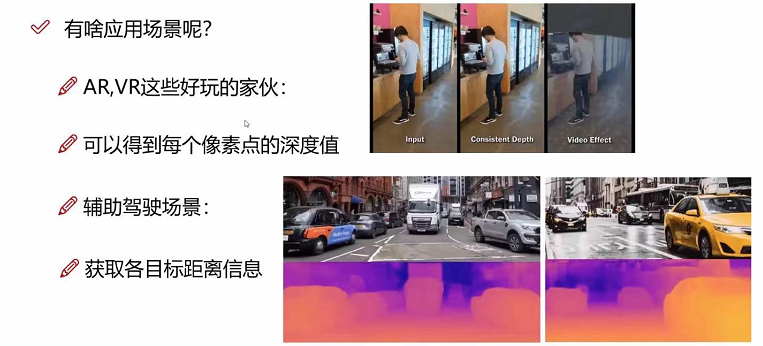

- 应用场景包括
AR,VR,自动驾驶,机器人等行业,除了上面两张图片中提到的应用场景,深度估计还可以运用于3D重建,障碍物检测,SLAM等一系列需要深度信息的下游任务中。因此,可见深度估计往往作为上游任务存在,重要性不言而喻。
1.3 几种深度估计的方法
现在很多深度传感器、激光雷达都可以获取深度信息,为什么还需要基于视频、图像利用算法获得深度信息呢?主要原因是激光雷达等深度传感器比较贵,相对来说摄像头成本比较低。
-
利用激光雷达或结构光在物体表面的反射获取深度点
这篇关于单目深度估计: LDRN网络及代码讲解的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







