本文主要是介绍4D毫米波雷达和3D雷达、激光雷达全面对比,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
众所周知,传统3D毫米波雷达存在如下性能缺陷:
1)静止目标和地物杂波混在一起,难以区分;
2) 横穿车辆和行人多普勒为零或很低,难以检测;
3) 高处物体和地面目标不能区分,容易造成误刹,影响安全性;
4) 角度分辨率低,远处目标位置精度低,误差大;
5) 点云稀疏,难以识别目标类型。
4D毫米波雷达突破传统雷达局限性,可以高精度探测目标的距离、速度、水平方位和俯仰方位,使得:
1)最远探测距离大幅提高,可达300多米,比激光雷达和视觉传感器都要远;
2) 4D毫米波雷达水平角度分辨率较高,通常可以达到1°的角度分辨率;
3) 4D毫米波雷达可以测量俯仰角度,可达到2°的角度分辨率,可在150m处区分地物和立交桥;
4)多普勒为零或很低的横穿车辆和行人, 通过高精度的水平角和俯仰角可以有效识别目标;
5)目标点云更密集,信息更丰富,更适合与深度学习框架结合。
国内外有很多公司在研发4D毫米波雷达,国外有博世、大陆等,国内有森斯泰克、华域汽车等,下表列出了一些典型的公司和产品:
| 国外主要4D毫米波雷达企业及产品 | ||
| 企业名称 | 产品频率 | 通道数 |
| 博世 | 77GHz | 12*16=192 |
| 大陆 | 77GHz | 12*16=192 |
| 电装 | 77GHz | |
| 海拉 | 77GHz | |
| 采埃孚 | 77GHz | 12*16=192 |
| 安波福 | 77GHz | |
| 日立 | 77GHz | |
| Mobileye | 77GHz | 48*48=2304 |
| 特斯拉 | 77GHz | |
| Arbe | 77GHz | 48*48=2304 |
| Uhnder | 77GHz | |
| Oculii | 77GHz | |
| Echodyne | 77GHz | |
| Vayyar | 77GHz | |
| 国内主要4D毫米波雷达企业及产品 | ||
| 企业名称 | 产品频率 | 通道数 |
| 隼眼科技 | 77GHz | |
| 森思泰克 | 77GHz | 12*16=192 |
| 德赛西威 | 77GHz | |
| 楚航科技 | 77GHz | 6*8=48 |
| 北京行易道 | 77GHz | |
| 深圳安智杰 | 77GHz | |
| 华域汽车 | 77GHz | 12*16=192 |
| 苏州豪米波 | 77GHz | |
| 几何伙伴 | 77GHz | 12*16=192 |
| 纳瓦电子 | 77GHz | 12*16=192 |
| 华为 | 77GHz | 12*16=192 |
| 中兴 | 77GHz | 12*16=192 |
| 复睿智行 | 77GHz | 12*16=192 |
| 赛恩领动 | 77GHz | 12*16=192 |
4D毫米波雷达在各项指标上明显由于传统3D雷达,这里用大陆经典的408雷达和采埃孚frgen21做对比,有更直观的认识。
| 技术参数 | ARS408 | FRGEN21 |
| 通道数 | 4T*6R=24 | 12T*16R=192 |
| 工作周期 | 60ms | 60ms |
| 最大点云数 | 512 | 3072 |
| 最远距离 | 220m | 300m |
| 距离分辨率 | 0.4m | 0.4m |
| 速度分辨率 | 0.1m/s | 0.1m/s |
| 方位角分辨率 | 5° | 1.2° |
| 俯仰角分辨率 | 10° | 2.3° |
| 尺寸估计误差 | 1.0m | 0.5m |
| 朝向估计误差 | 6° | 2.5° |
可以看到,4D雷达在通道数,点云数,最远距离,角分辨力等各方面都明显优于传统3D雷达。当然,指标是抽象的,典型场景的表现更具象,也更有说服力。
典型场景1:地面窨井盖或金属物
下图是典型的城市道路,408雷达将前方的窨井盖识别为静止目标并输出,但4D雷达输出点迹判断为地面点直接过滤,不会形成目标,避免了FCW、AEB等误触发。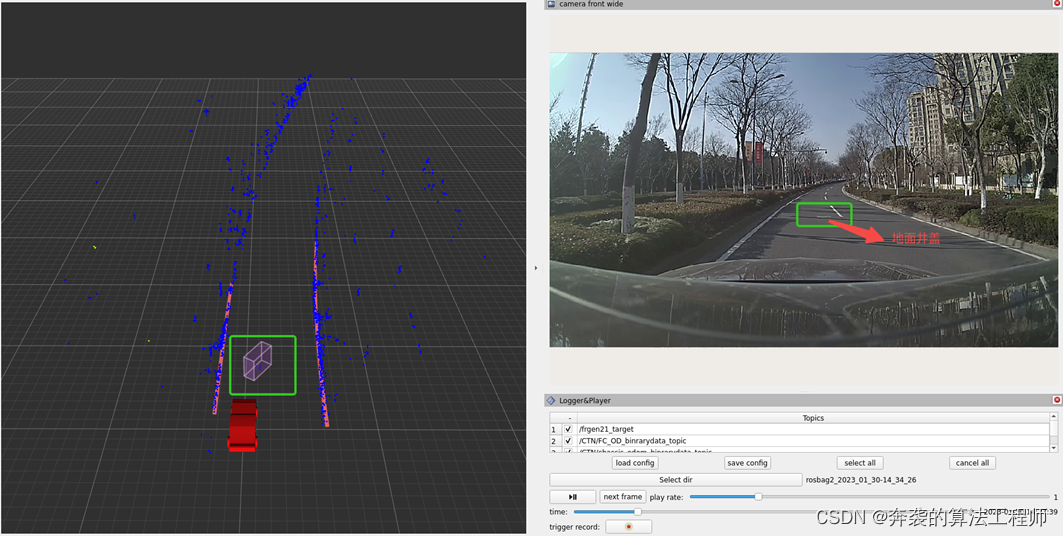
![]()
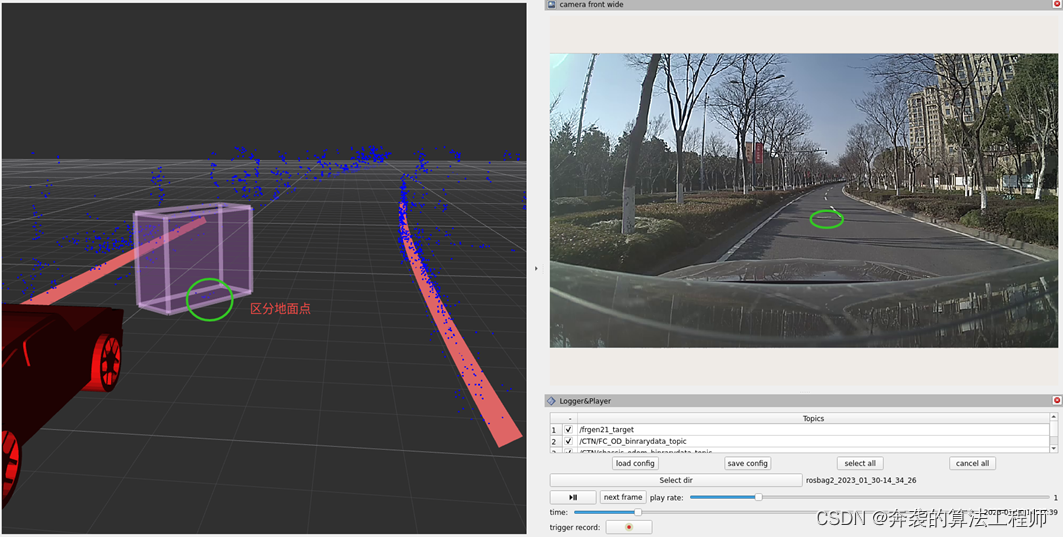
![]() 下图是路面的连接处,通常是金属,可以看到4D雷达完全检测出来,判断为地面点,不会引起功能问题。
下图是路面的连接处,通常是金属,可以看到4D雷达完全检测出来,判断为地面点,不会引起功能问题。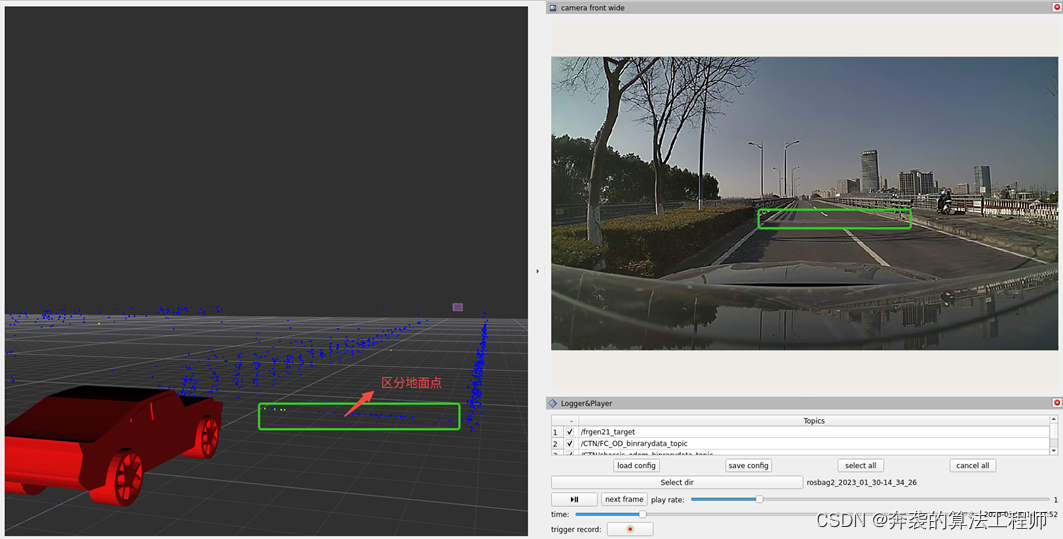
![]() 典型场景2:指示牌或交通杆
典型场景2:指示牌或交通杆
指示牌和交通杆也是城市道路常见的,下图中408雷达将高处的交通横杆识别为静止目标,但4D雷达的点迹有一定高度,明显高于车辆,会识别为高处点并过滤,不会输出静止目标。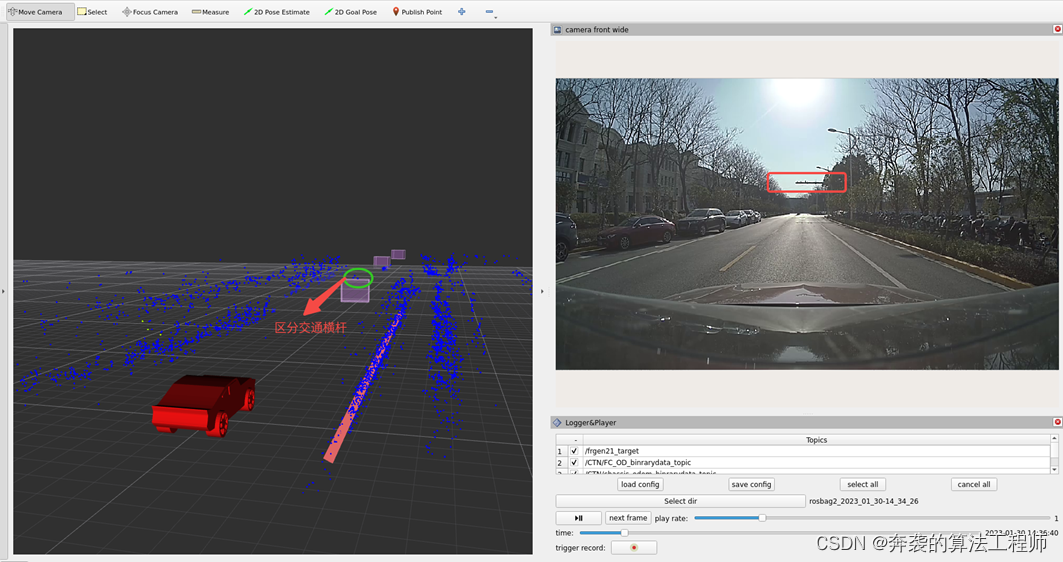 典型场景3:十字路口横穿斜穿目标
典型场景3:十字路口横穿斜穿目标
十字路口的各类车辆行人等目标对于传统雷达来说很难估计尺寸和朝向,但4D雷达由于点云数量多且精度高,可以基本输出目标轮廓,再通过算法处理得到目标更准确的尺寸和朝向。
![]()

![]() 4D雷达性能强,有很多人认为能替代激光雷达,这里用速腾的128线激光雷达M1做对比,两者的指标参数如下。
4D雷达性能强,有很多人认为能替代激光雷达,这里用速腾的128线激光雷达M1做对比,两者的指标参数如下。
可以看到激光雷达点云数远大于4D雷达,角分辨率也远高于4D雷达,唯二不足的探测距离和速度分辨率。
| 技术参数 | RS-M1 | FRGEN21 |
| 工作周期 | 100ms | 60ms |
| 最大点云数 | 70000 | 3072 |
| 最远距离 | 180m | 300m |
| 距离分辨率 | 0.05m | 0.4m |
| 速度分辨率 | 0.1m/s | |
| 方位角分辨率 | 0.2° | 1.2° |
| 俯仰角分辨率 | 0.2° | 2.3° |
| 尺寸估计误差 | 0.2m | 0.5m |
| 朝向估计误差 | 1° | 2.5° |
实车测试同步输出激光雷达和4D雷达目标,可以看到激光雷达尺寸朝向优于4D雷达,但远处目标难以检测,不如4D雷达。
![]() 对于近处小目标,激光雷达由于更高的距离角度精度,可以分辨十字路口的行人,但4D雷达对此无能为力。
对于近处小目标,激光雷达由于更高的距离角度精度,可以分辨十字路口的行人,但4D雷达对此无能为力。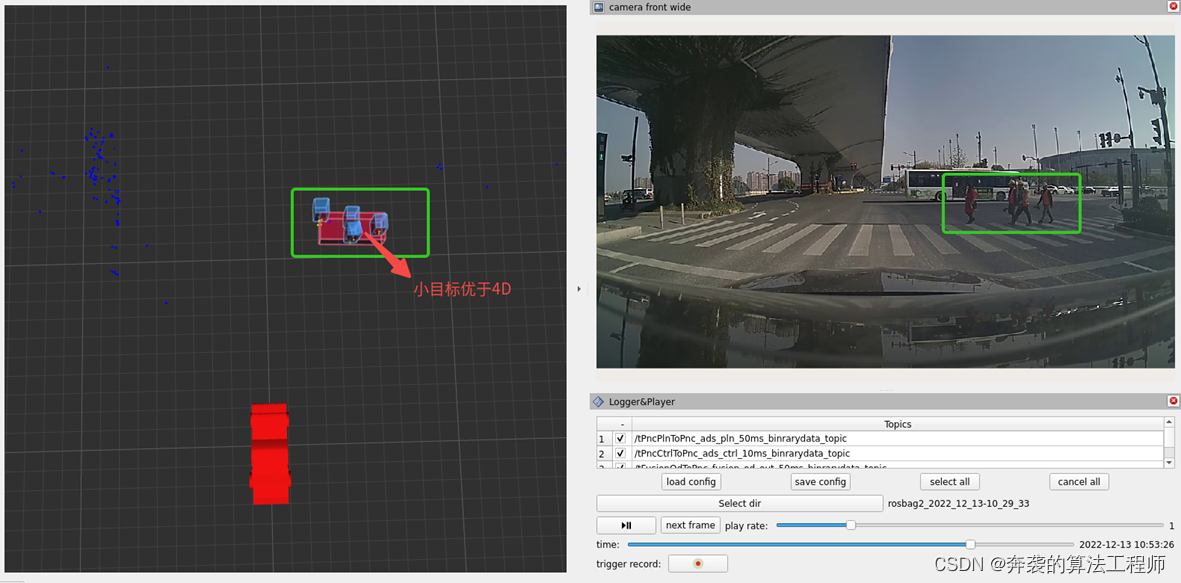
![]() 综合来看,4D毫米波雷达相比3D毫米波雷达功能有明显提升,且产业链成熟,可靠性高,大规模量产价格可控;激光相比4D毫米波雷达功能有提升,但价格较高,性价比偏低;毫米波雷达和视觉融合优势互补,软硬件成熟可靠,性价比高。因此,传感器方案架构可以从多方面综合考虑选择合适的传感器,这里给出一些方案作为参考,仅作为探讨。
综合来看,4D毫米波雷达相比3D毫米波雷达功能有明显提升,且产业链成熟,可靠性高,大规模量产价格可控;激光相比4D毫米波雷达功能有提升,但价格较高,性价比偏低;毫米波雷达和视觉融合优势互补,软硬件成熟可靠,性价比高。因此,传感器方案架构可以从多方面综合考虑选择合适的传感器,这里给出一些方案作为参考,仅作为探讨。
| 传感器配置 | 性能瓶颈 | 性能提升 | 功能提升 | 当前价格 | 量产价格 |
| 3D前雷达+3D角雷达 | 静止目标误检 横向误差较大 | 350+4*200=1150 | 350+4*200=1150 | ||
| 4D前雷达+3D角雷达 | 横向误差较大 | 静止目标误检概率降低85% 正前方切入、切出 | AEB、ACC | 1200+4*200=2000 | 600+4*200=1400 |
| 4D前雷达+4D角雷达 | 侧方、后方切入切出 | AEB、ACC、ALC、LCA | 1200+4*400=2800 | 600+4*300=1800 | |
| 3D前雷达+3D角雷达+1前激光 | 横向误差较大 | 静止目标误检概率降低98% 正前方切入、切出 | AEB、ACC | 350+4*200+3500 =4650 | 350+4*200+2000 =3150 |
| 4D前雷达+4D角雷达 +1前激光 | 侧方、后方切入切出 | AEB、ACC、ALC、LCA | 1200+4*400+3500 =6300 | 600+4*300+2000 =3800 |
这篇关于4D毫米波雷达和3D雷达、激光雷达全面对比的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!


