本文主要是介绍RoboSense(速腾)16线激光雷达在windows及Ubuntu18+ROS melodic下的实时数据展示,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
在学习ROS的cartographer建图时,基本都是仿真去实现的。近期公司项目有采购一个RoboSense(速腾)16线激光雷达,尝试接入激光雷达,在windows及Ubuntu18+ROS melodic下展示实时数据,并成功建图,现将实践历程分享记录在此。
一. 使用RSView工具实时展示RoboSense16的雷达数据
首先分享RoboSense16激光雷达相关资料,其中包括用户手册及windows系统下的RSView工具的绿色版本压缩包。
网盘链接:https://pan.baidu.com/s/1EH5Faak5LJ8xLfKwWuztHg?pwd=3ef4
提取码:3ef4
以上资料在RoboSense16官网上也可以下载。
- 雷达的出厂网络配置如下图,即默认雷达自身ip为1.200,电脑ip为1.102。故为了成功连接雷达,需修改本机(windows系统)的网络配置,即静态Ip地址设置为192.168.1.102,网关为192.168.1.1。

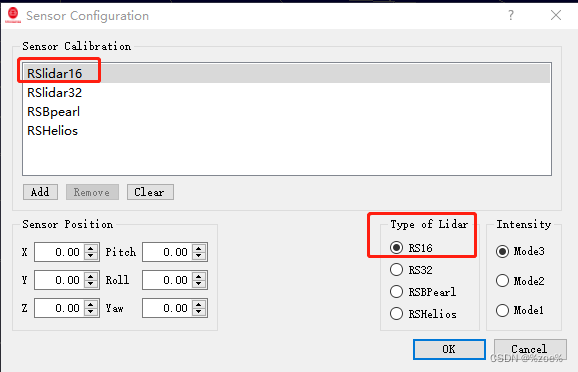
- 启动RSview工具
RSView工具压缩包下载后解压到本地,以管理员方式运行bin\RSView.exe执行程序,打开界面。
注:解压后的路径中不允许存在中文,否则工具打不开,含泪分享踩坑经历
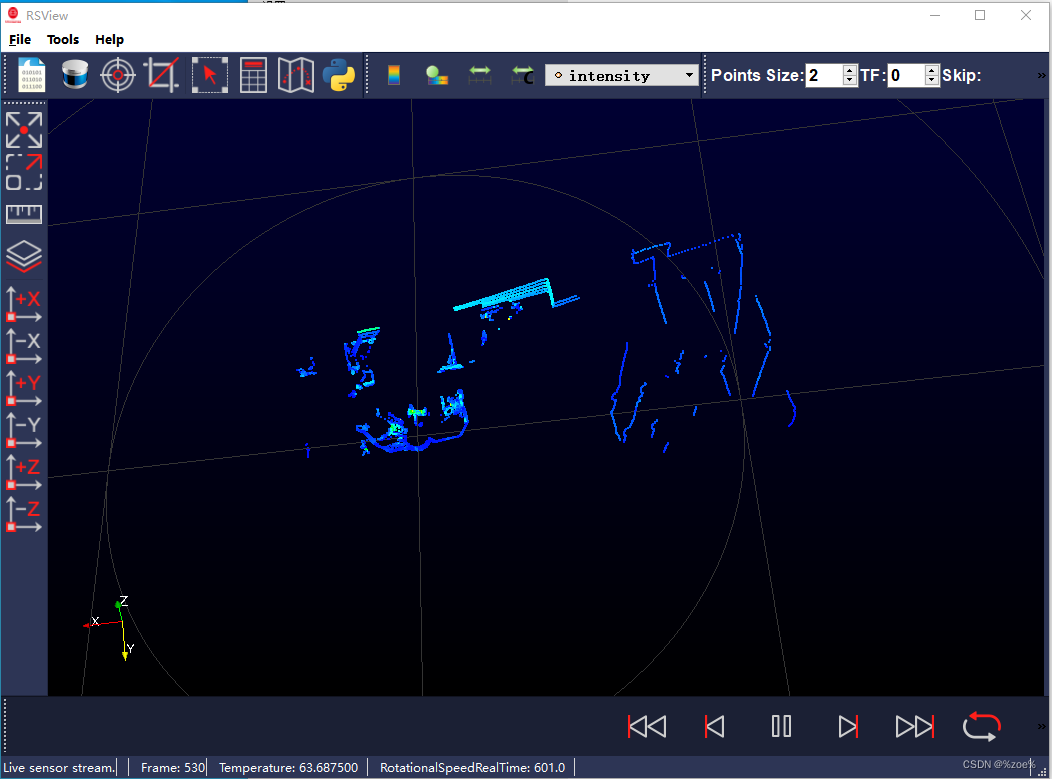
如下图,打开连接,取数据流,可以看到在RSView中能正常获取雷达激光数据。

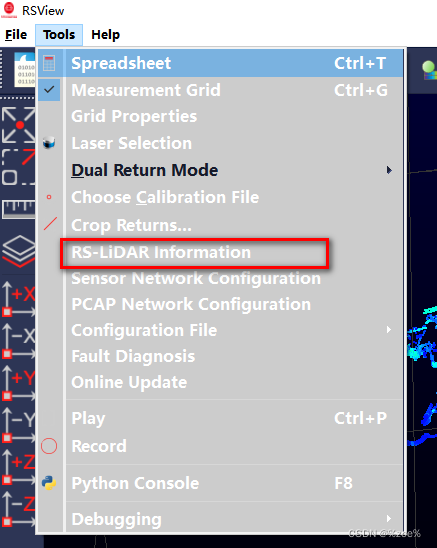
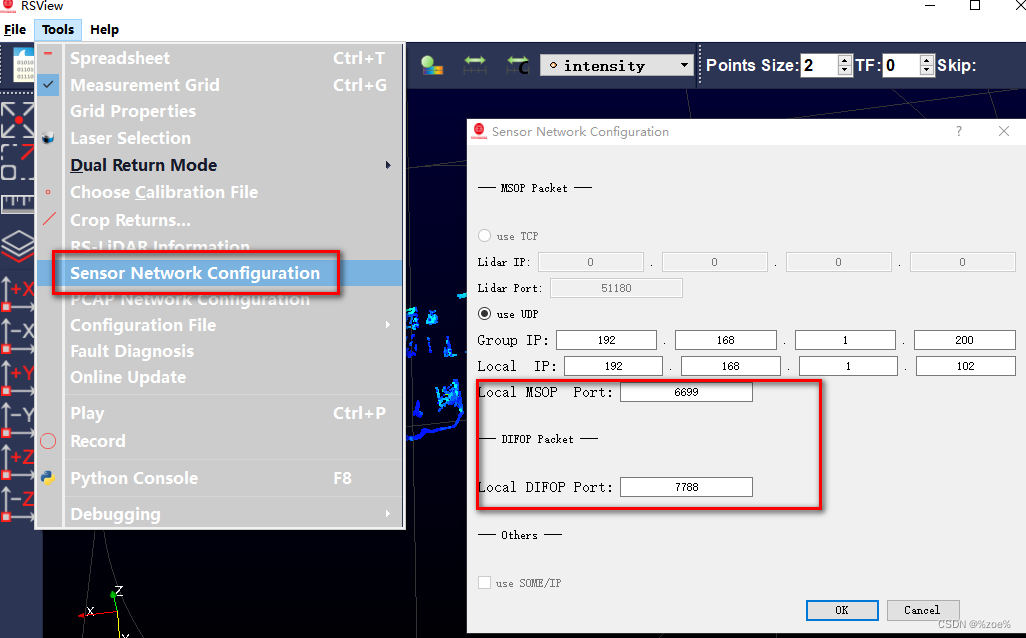
二. 使用RSView工具修改RoboSense16的固件参数及ip端口
由于每次连接雷达都需要把本机Ip改为1网段,非常不方便。为了方便使用,将修改了RoboSense16的网段为58网段(公司局域网段为58),端口6699,7788不变。步骤如下:
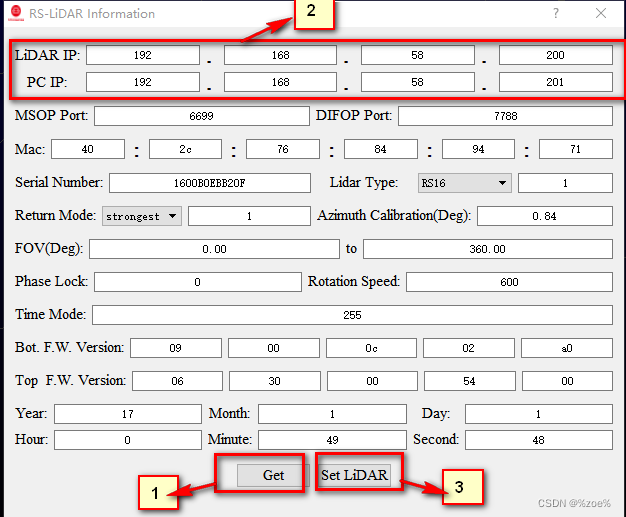
注:下图中端口需要保存为6699,7788。我自己的当时默认不是这个,导致一直连不上雷达。
三.RoboSense16线雷达在虚拟机Ubuntu18+ROS melodic环境下的连接与实时数据展示
- RoboSense 16线雷达驱动安装
(1)安装依赖项
sudo apt-get install libpcap-dev
(2)创建工作空间,并下载源码
mkdir -p ~/robosense_ws/src
cd ~/robosense_ws/src
git clone https://github.com/RoboSense-LiDAR/ros_rslidar
(3)修改文件权限
cd ~/robosense_ws/src/ros_rslidar/rslidar_drvier
chmod 777 cfg/*
cd ~/robosense_ws/src/ros_rslidar/rslidar_pointcloud
chmod 777 cfg/*
(4)源码编译
cd ~/robosense_ws
catkin_make
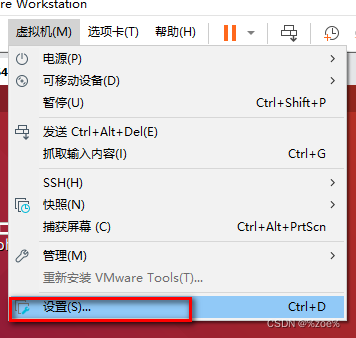
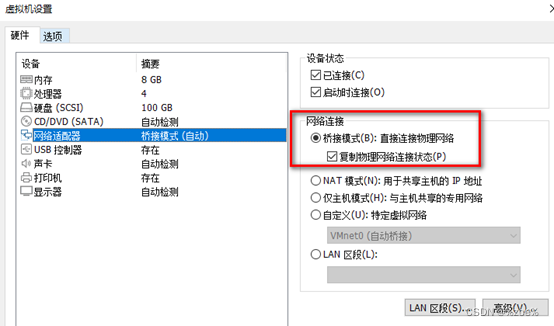
- 设置虚拟机网络位桥接模式,并设置静态ip为192.168.58.201(上一节通过RSview设置的,默认是192.168.1.102)
(1)设置桥接模式
(2)设置静态Ip
新开终端,用 ip a 首先查看自己的网卡编号,如下图,我的为ens33。
ip a
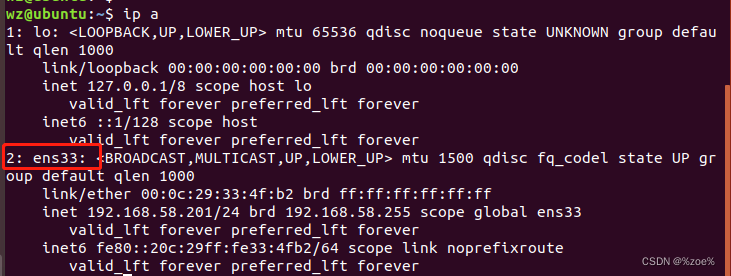
设置网卡的静态ip
sudo vim /etc/network/interfaces
修改文件如下,其中,ens33是通过 ip a 命令得到的,ip地址如上所述设置的雷达对应的58.201,并设置网关。
# interfaces(5) file used by ifup(8) and ifdown(8)
auto lo
iface lo inet loopbackauto ens33
iface ens33 inet static
address 192.168.58.201
netmask 255.255.255.0
gateway 192.168.58.1
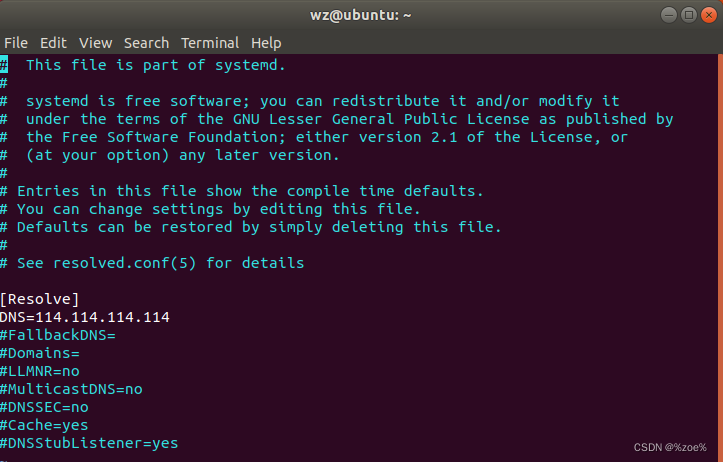
然后设置DNS服务器:
sudo vim /etc/systemd/resolved.conf
放开DNS字段,并设置为114.114.114.114,如图所示:
重启网卡,重启虚拟机。
sudo /etc/init.d/networking restart
reboot
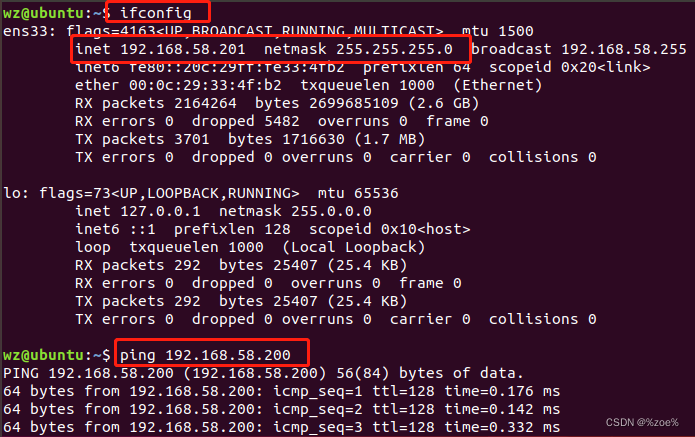
重启后,用命令查看Ip是否设置成功,并能成功Ping通雷达对应的地址(58.200)
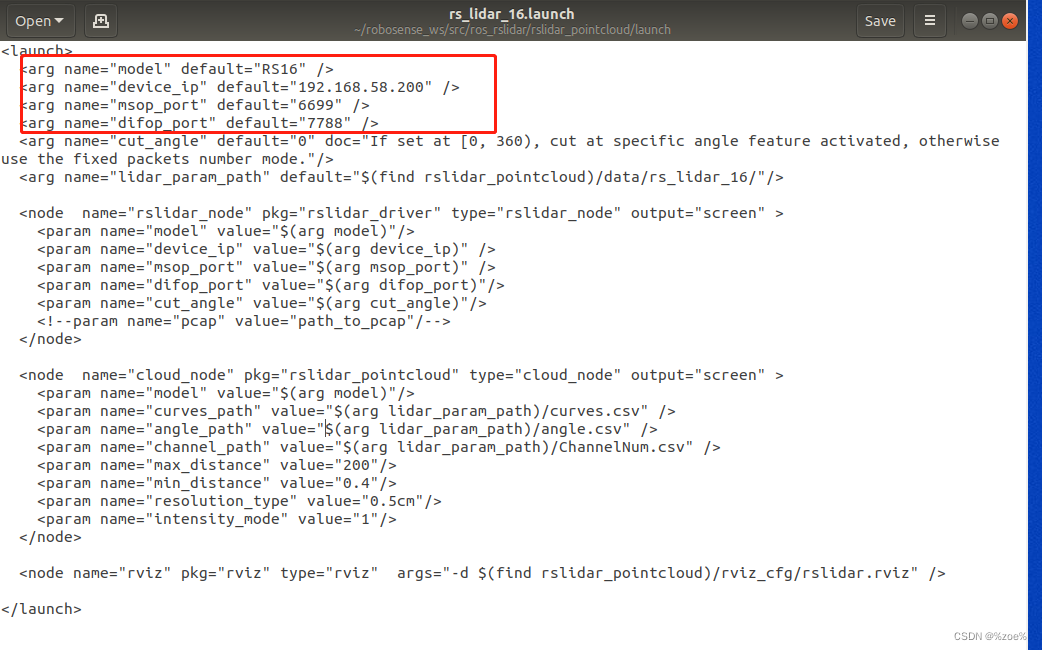
(3)更改配置文件如下
cd ~/robosense_ws/src/ros_rslidar/rslidar_pointcloud/launch
gedit rs_lidar_16.launch
(4)启动3d雷达驱动
cd ~/robosense_ws
source devel/setup.bash
roslaunch rslidar_pointcloud rs_lidar_16.launch
将启动rviz节点,如下图界面上展示实时的雷达数据。

至此,RoboSense(速腾)16线激光雷达在windows下以及在Ubuntu18+ROS melodic环境下的连接与实时数据展示已经完成。下一篇博客将分享利用RoboSense16线激光雷达数据进行cartographer建图的实践历程。
这篇关于RoboSense(速腾)16线激光雷达在windows及Ubuntu18+ROS melodic下的实时数据展示的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



