本文主要是介绍阵列信号处理_对比常规波束形成法(CBF)和Capon算法,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
空间谱估计
利用电磁波信号来获取目标或信源相对天线阵列的角度信息的方式,也称测向、波达方向估计(DOA)。主要应用于雷达、通信、电子对抗和侦察等领域。
发展
- 常规波束形成(CBF)。本质是时域傅里叶变换在空域直接应用,分辨力受限于瑞利限;
- Capon自适应波束形成(1969年)。本质将维纳(Wiener)滤波思想应用于空域处理;但未利用噪声统计特性,对分辨力提升有限;
- 信号子空间类方法:多重信号分类(MUSIC)法(1986年)和旋转不变子空间(ESPRIT)法(1989年);
- 最大似然估计法(1990年);
- 压缩感知或稀疏恢复DOA方法(2006年~2015年);
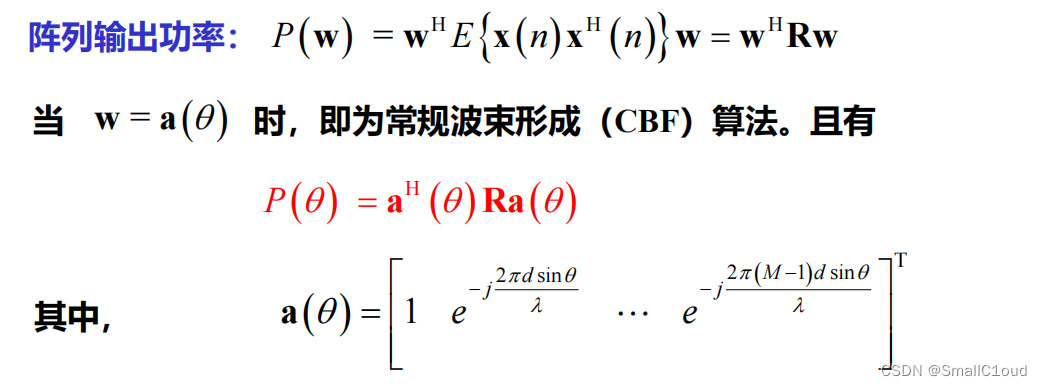
常规波束形成法(Conventional Beamforming,CBF)
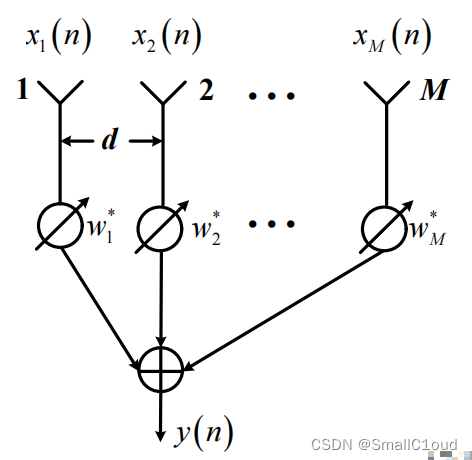
物理含义:
1、对回拨数据做空域傅里叶变换,得到数据在各方向功率值;
2、在各个角度做相参积累。
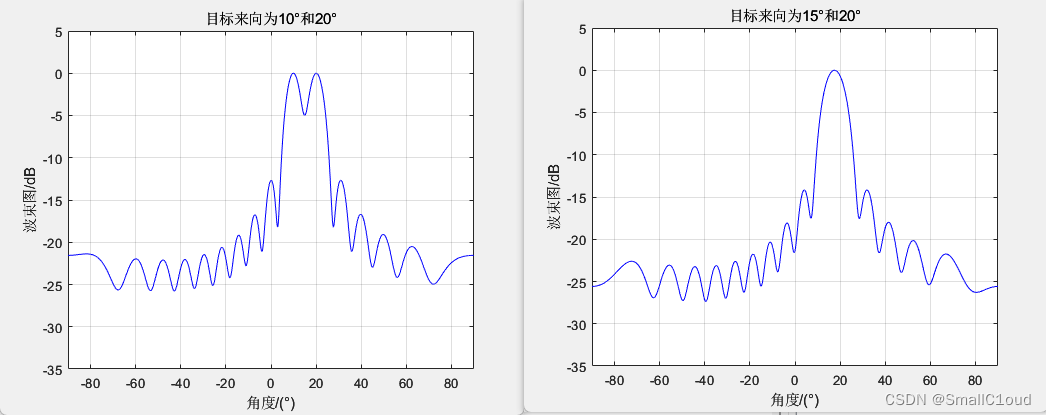
缺点:受限于瑞利限,当来向角接近时,无法分辨
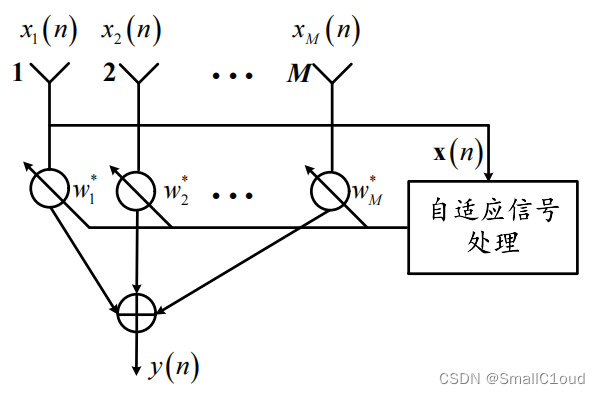
Capon算法 或 最小方差无失真响应(MVDR)
自适应信号处理器
根据阵列输入信号及输出信号自适应形成权矢量,不同权矢量可将形成的波束指向不同方向,对期望信号得到最大输出功率的方向即信号入射方向。
波束形成的最优权:
保证某确定方向 θ d \theta_d θd 信号能正确接收,而其它入射方向信号被干扰或被完全抑制
实际应用中,不知道目标来向 θ d \theta_d θd ,只能通过扫描得到谱曲线
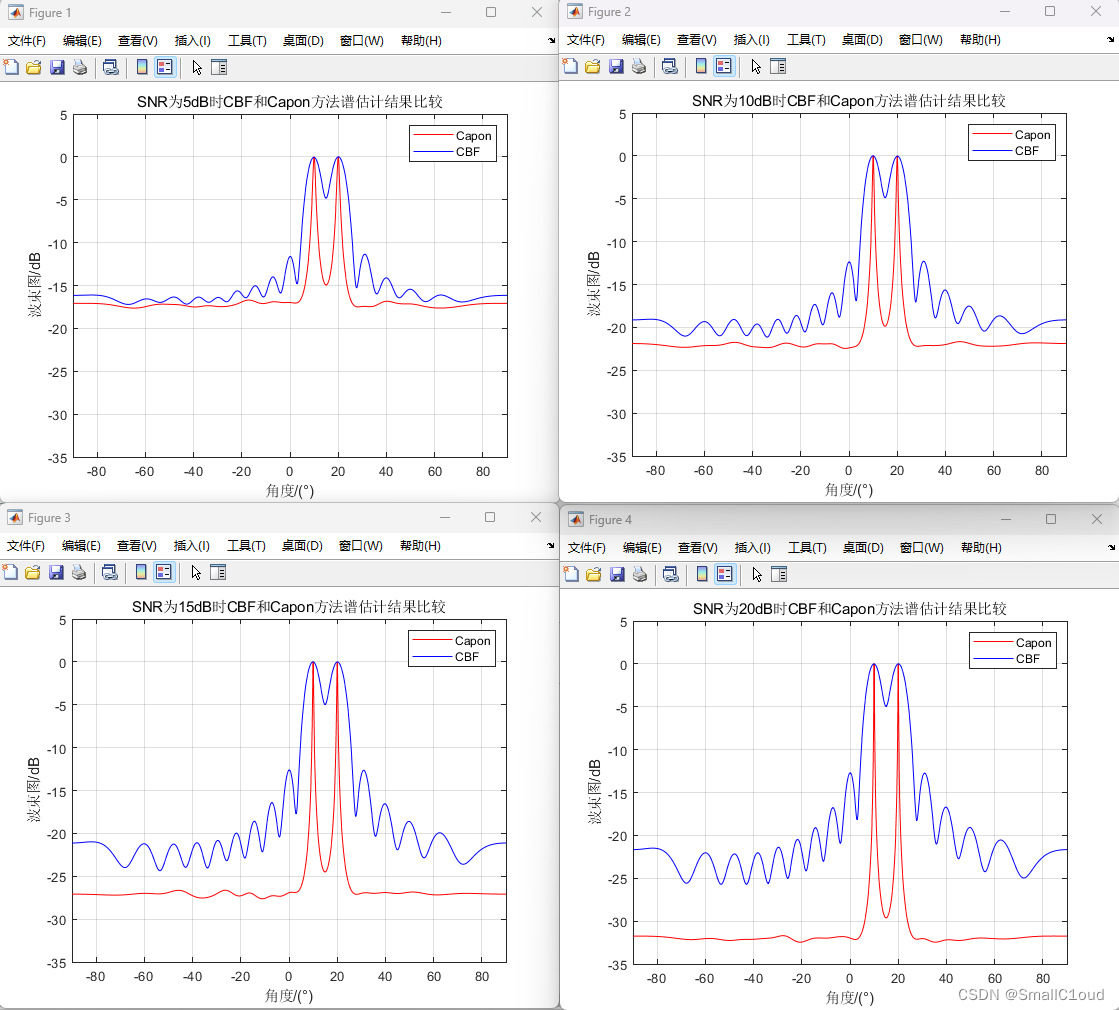
仿真对比
%%% 公共仿真条件:d=lambda/2,两目标来向角分别为10°和20°,估计R快拍数=500,阵元数为16
%%% 变化参数:SNR为5dB、10dB、15dB、20dB四种情况
%% 参数设置
source_number=2; %信元数=2
sensor_number=16; %阵元数16个
Signal_length=500; %信号长度
snapshot_number=Signal_length;%估计R快拍数=500
w=[pi/4 pi/6].'; %信号频率
lambda=((2*pi*3e8)/w(1)+(2*pi*3e8)/w(2))/2;%信号波长
d=0.5*lambda; %阵元间距
source_doa=[10 20]; %两个信号的入射角度即目标来向角:10°和20°
snr=[5,10,15,20]; %信噪比SNR为5dB、10dB、15dB、20dB四种情况
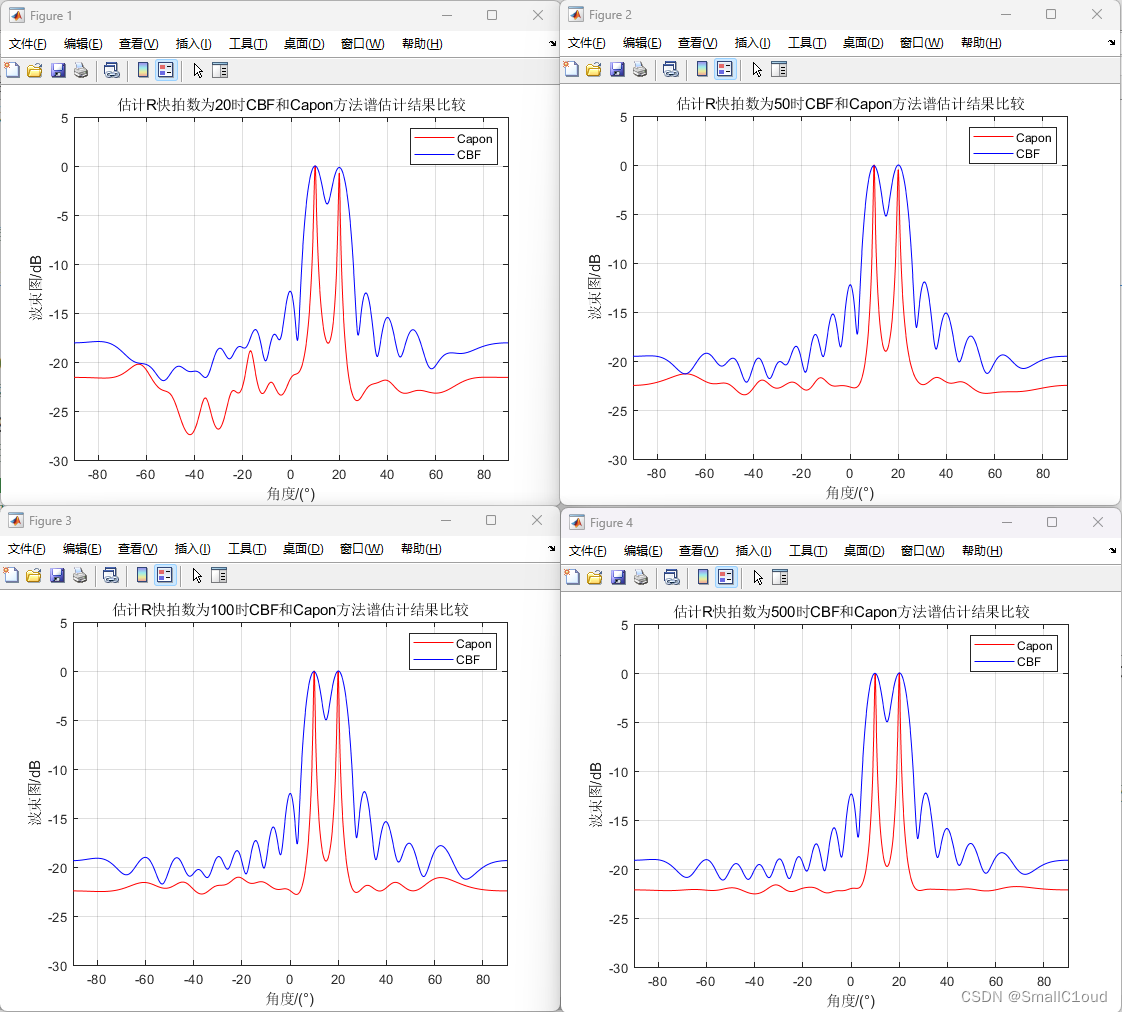
%%% 公共仿真条件:d=lambda/2,两目标来向角分别为10°和20°,SNR=10dB,阵元数为16
%%% 变化参数:估计R快拍数为:20、50、100、500四种情况
Signal_length=[20,50,100,500];%信号长度
snapshot_number=Signal_length;%估计R快拍数
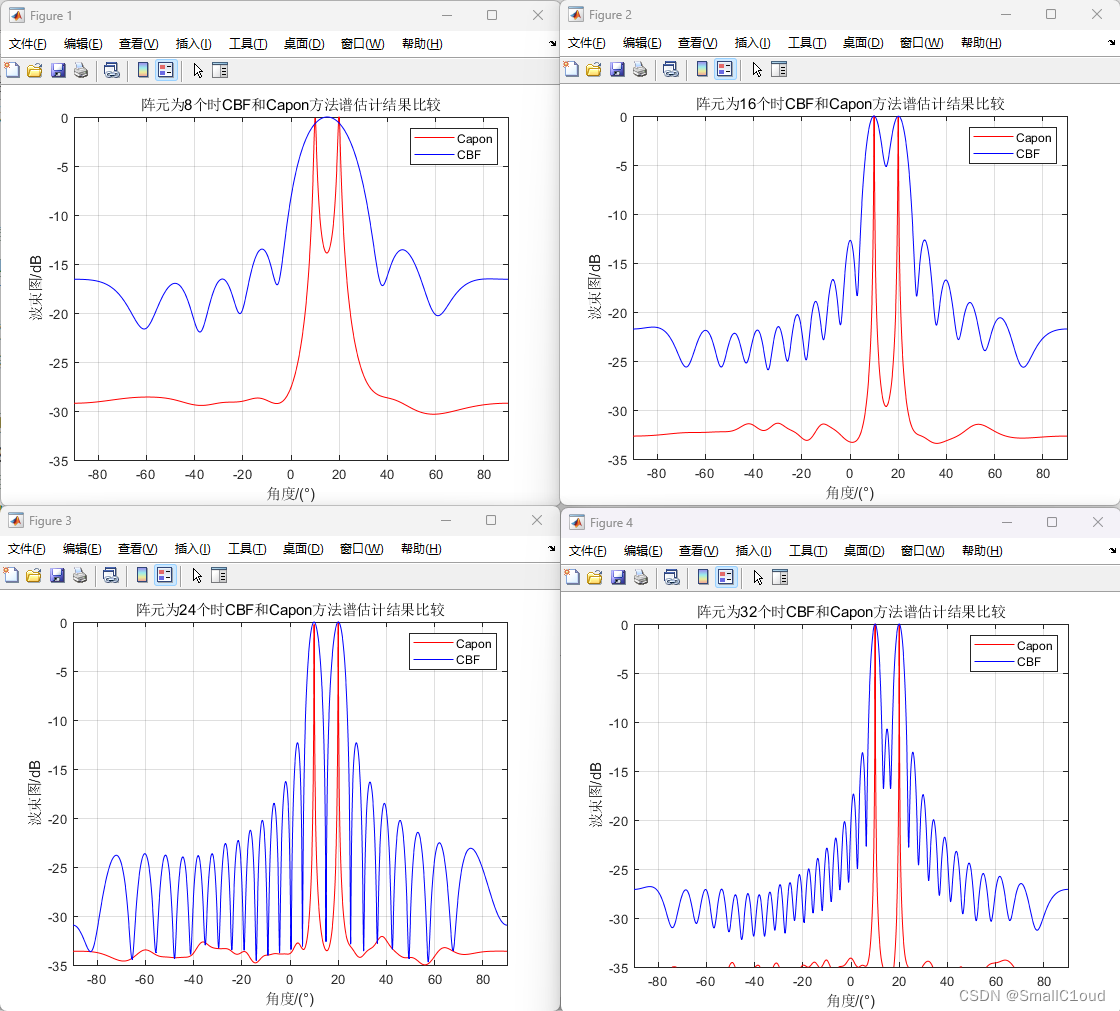
%%% 公共仿真条件:d=lambda/2,两目标来向角分别为10°和20°,SNR=20dB,估计R快拍数=100
%%% 变化参数:阵元数分别为8、16、24、32四种情况
sensor_number=[8,16,24,32]; %变化参数:阵元数 仿真8、16、24、32四种情况
这篇关于阵列信号处理_对比常规波束形成法(CBF)和Capon算法的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!


