本文主要是介绍Ubuntu20.04安装ROS——实现小海龟仿真,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Ubuntu20.04安装ROS——实现小海龟仿真
文章目录
- Ubuntu20.04安装ROS——实现小海龟仿真
- 一.ROS的基本介绍
- 1.一个目标
- 2.五个特点
- 3.四位一体
- 二.ROS软件安装
- 1.添加ROS源
- 2.添加密钥
- 3.安装ROS
- 4.初始化rosdep
- 5.设置环境变量
- 6.安装rosinstall
- 三.ROS 第一个例程:小海龟
- 1. 启动ROS Master
- 2.启动小海龟仿真器(`另外启动一个终端`)
- 3.启动海龟控制节点(`再另外启动一个终端`)
- 四:参考
一.任务简介
- 1.对ROS的基本介绍
- 2.ROS软件安装
- 3.实现ROS第一个例程
二.实验准备
- 1.**VMware workstation 软件 **
- 2.Ubuntu 20.04版本
一.ROS的基本介绍
ROS (Robot Operating System, 机器人操作系统) 提供一系列程序库和工具以帮助软件开发者创建机器人应用软件。它提供了硬件抽象、设备驱动、库函数、可视化、消息传递和软件包管理等诸多功能。
1.一个目标
- 提高机器人研发中的软件复用率
2.五个特点
- 1.点对点的设计
- 2.多语言支持
- 3.架构精简 ,集成度高
- 4.组件化工具包丰富
- 5.免费并且开源
3.四位一体
- ROS = 通讯机制+开发工具+应用功能+生态系统
二.ROS软件安装
1.添加ROS源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'

2.添加密钥
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654


3.安装ROS
sudo apt update
sudo apt-get install ros-noetic-desktop-full
注意: 由于我的版本你是Ubuntu 20.04 ,所以这里用的noetic,不同的版本需要不同的命令.否则会出现Unable to locate package ros-kinetic-desktop-full的错误。ROS的版本主要有Melodic、Lunar、Kinetic版本,根据linux系统不同选择合适的版本,报错也就解决了。安装时间比较长。
4.初始化rosdep
sudo rosdep init
rosdep update
- 1.
注意:使用sudo rodep init出现sudo rosdep:找不到命令提示的错误
sudo apt install python-rosdep
-
2.
注意:出现ERROR: cannot download default sources list from: https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list Website may be down.的错误 -
解决方法:
cd /etcsudo gedit hosts在文本后面添加 () raw.githubusercontent.com(括号是通过https://site.ip138.com进行输入raw.githubusercontent.com查询获取得到,任意选择一个)
如果没有解决,可以尝试一下换成手机热点等等.
- 3.
注意:出现ERROR: error loading sources list: <urlopen error <urlopen error timed out (https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml)
网站https://ghproxy.com/支持github的资源代理,可以用此代理加速rosdep对Github的访问,进而解决rosdep update失败问题。我们要在rosdep的若干个脚本文件中,把 https://ghproxy.com/ 添加到相应URL前。该方法参考rosdep update 超时失败2021最新解决方法。
下述要修改的文件中,由于我是Ubuntu20.04,ROS Noetic,相关文件在python3路径下,其他版本安装路径可能不一样,可以用find命令在系统中查找。如对文件1,可用命令:sudo find / -name rep3.py进行查找,查找结果如下:

- 解决方法:
- 修改文件1:
/usr/lib/python3/dist-packages/rosdep2/rep3.py
# REP3_TARGETS_URL = 'https://raw.githubusercontent.com/ros/rosdistro/master/releases/targets.yaml'
REP3_TARGETS_URL = 'https://ghproxy.com/https://raw.githubusercontent.com/ros/rosdistro/master/releases/targets.yaml'
- 修改文件2:
/usr/lib/python3/dist-packages/rosdistro/__init__.py
# DEFAULT_INDEX_URL = 'https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml'
DEFAULT_INDEX_URL = # DEFAULT_INDEX_URL = 'https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml'
DEFAULT_INDEX_URL = 'https://ghproxy.com/https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml'
- 修改文件3:
/etc/ros/rosdep/sources.list.d/20-default.list
# os-specific listings first
yaml https://ghproxy.com/https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml osx# generic
yaml https://ghproxy.com/https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml
yaml https://ghproxy.com/https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/python.yaml
yaml https://ghproxy.com/https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/ruby.yaml
gbpdistro https://ghproxy.com/https://raw.githubusercontent.com/ros/rosdistro/master/releases/fuerte.yaml fuerte# newer distributions (Groovy, Hydro, ...) must not be listed anymore, they are being fetched from the rosdistro index.yaml instead再执行rosdep update,成功:

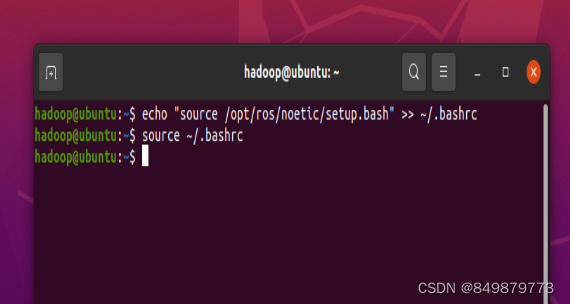
5.设置环境变量
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
- 注意: 这里的
noetic也是因为Ubuntu版本的原因关系,如果版本不同需要修改.
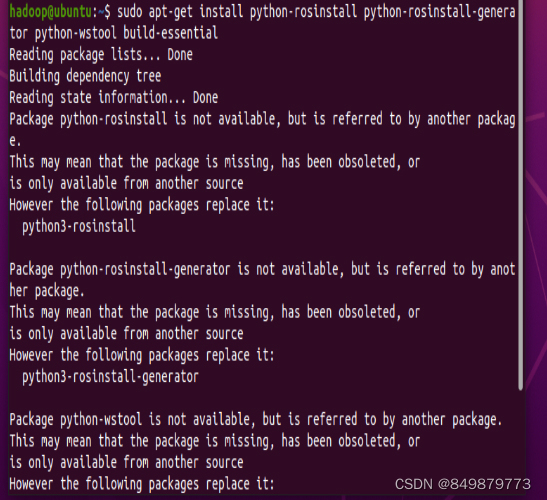
6.安装rosinstall
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
三.ROS 第一个例程:小海龟
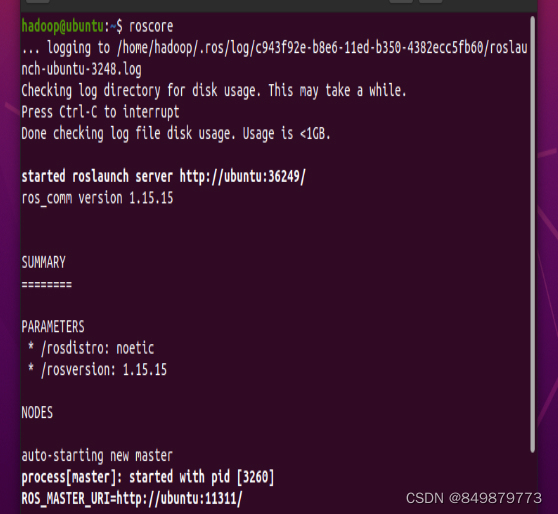
1. 启动ROS Master
roscore
2.启动小海龟仿真器(另外启动一个终端)
rosrun turtlesim turtlesim_node
3.启动海龟控制节点(再另外启动一个终端)
rosrun turtlesim turtle_teleop_key
- 这一步过后,可以通过上下左右控制小海龟进行移动.

四:参考
Ubuntu18.04安装ROS——实现小海龟仿真
ROS学习——rosdep update 超时解决方法
这篇关于Ubuntu20.04安装ROS——实现小海龟仿真的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





