ubuntu20.04专题
![[环境配置]ubuntu20.04安装后wifi有图标但是搜不到热点解决方法](https://i-blog.csdnimg.cn/blog_migrate/c40e82403b25f0299fe82b03f60cabcb.png)
[环境配置]ubuntu20.04安装后wifi有图标但是搜不到热点解决方法
最近刚入手一台主机,暗影精灵8plus电竞主机,安装ubuntu后wifi怎么都搜不到热点,前后重装系统6次才算解决问题。这个心酸历程只有搞技术人才明白。下面介绍我解决过程。 首先主机到手后是个windows10系统,我用无线网连接了一下,可以正常上网,说明主机有无限网卡且正常。然后我就直接开始安装Ubuntu20.04了,安装成功后发现wifi有图标但是搜不到热点,我想是不是无线网卡驱动有没有
Ubuntu20.04+ros-noetic配置Cartographer
一、概述 因为要配置激光SLAM,Cartographer属于激光雷达SLAM 中比较经典的一款,在学习之前先将其在Ubuntu20.04首先配置出来并成功运行demo。 二、具体操作 (一)概述 使用平台是Windows的wsl2上的Ubuntu20.04子系统,双系统与虚拟机的安装原理与这个相同。主要依照的安装操作是官方文档,链接如下所示。 Runni

Ubuntu20.04使用systemd配置Gogs开机启动
先说现象,大家用sudo systemctl start gogs是不是和我一样? ubuntu@raspberry-pi:~$ sudo systemctl status gogs● gogs.service - GogsLoaded: loaded (/lib/systemd/system/gogs.service; enabled; vendor preset: enabled)Acti

Windows下基于VMware虚拟机安装Ubuntu20.04系统
Windows下基于VMware虚拟机安装Ubuntu20.04系统 前言安装VMware软件安装Ubuntu20.04下载Ubuntu镜像安装镜像 结语 前言 本教程旨在帮助想要接触linux的道友,为诸位道友们连接进入linux世界的桥梁,从此可以在linux的世界里任意翱翔,本博客为笔者亲自实践总结,可放心收藏点赞并实践 安装VMware软件 链接稍后附上 安装Ubu
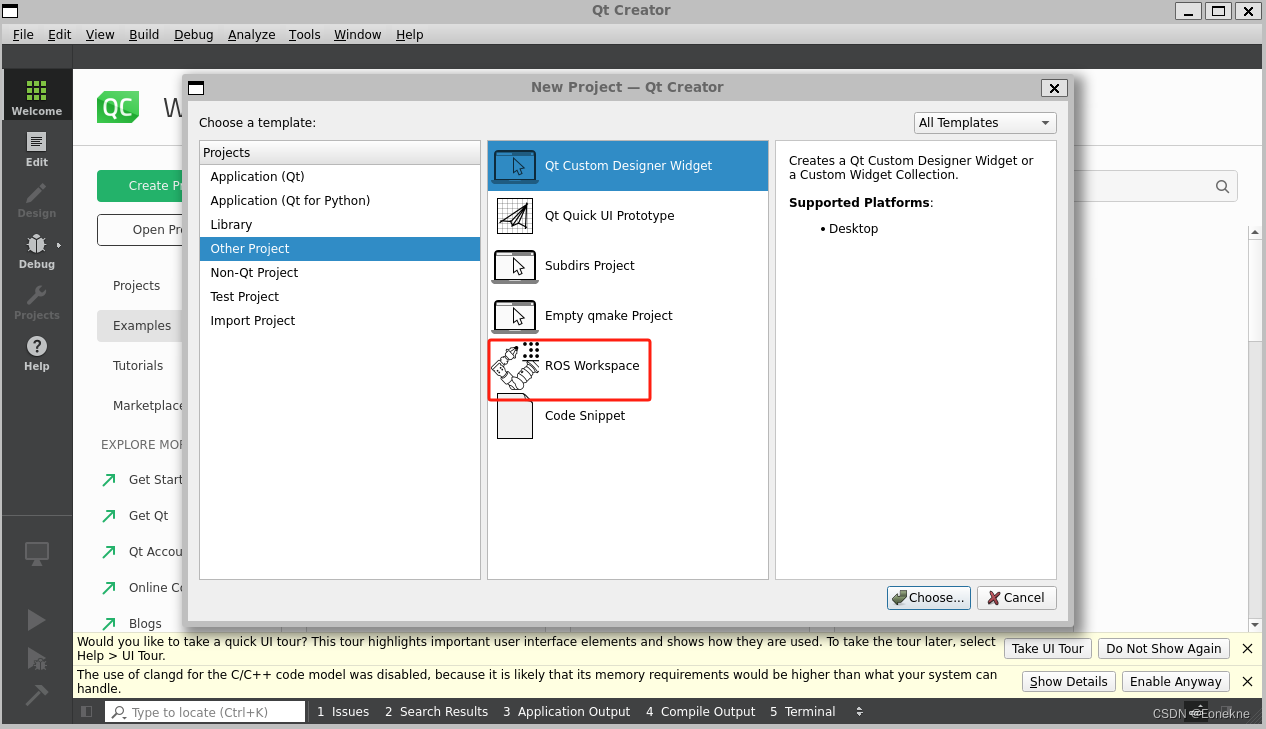
![[rk3588 ubuntu20.04]移植ROS2](/front/images/it_default.gif)
[rk3588 ubuntu20.04]移植ROS2
目录 1 使用命令行安装ROS2 1.1设置语言 1.2添加源 1.3安装ROS2 1.4设置环境变量 2 在编译源码阶段安装ROS2 2.1调整roofts.img大小 2.2 安装ROS2 3 ROS2功能测试 1 使用命令行安装ROS2 1.1设置语言 设置语言为UTF-8。 sudo apt update && sudo apt insta

openharmony历程一:安装ubuntu20.04
1.下载ubuntu20.04 官网下载 下拉选择 可使用镜像: 镜像 2.安装 本人使用vmware,其他的如virtualbox也差不多 选择自定义和下一步 我使用的是r5 5600H,只有12核。 由于后面用于鸿蒙安装,推荐内存16GB及以上,硬盘100GB及以上。然而非常不幸,我的电脑只能分到11个G.干脆选了10 先默认,后面不行再改也可以

LINUX-ubuntu20.04下安装GUI-Guider出现的依赖问题解决办法
个人安装遇见的问题,并且已解决,仅供参考!!! 采用下载好gui-guider的安装包,然后离线安装的方式; 目录 问题: 一般方法 解决办法 问题: 发现出现下面的配置依赖问题: 通常这种问题一般联网更新源直接配置即可(确保系统联网); 一般方法 只需要输入指令: 一般这样就可以解决。 但如果出现这种情况:直接把软件卸载了。 单独安装依赖后也出现报错
ubuntu20.04 colmap安装
apt-get update apt-get install colmap 官方包网址: colmap_3.6+really3.6-1_amd64.deb Debian 11 Download (pkgs.org) 官方安装非常简单,但是看网上都是手动安装教程,都麻烦的要命!我也踩了两天雷,还是看github上的issue找到的 注意: 这种安装方式会出现不能用cuda进行稠密重

VMware安装Ubuntu20.04
1. 下载 整理的镜像链接 阿里网盘: 阿里云盘分享 提取码: l7y1 2. 新建虚拟机向导 选择自定义,然后下一步。 默认配置,下一步。 选择稍后安装操作系统,下一步。 选择操作系统Linux,版本Ubuntu64位,下一步。 给虚拟机命名,更改位置,下一步。

VMWare中添加Ubuntu20.04.06镜像
一、下载Ubuntu镜像 Ubuntu20.04: 官方下载地址https://releases.ubuntu.com/20.04.6/ 进入官网 点击下图红框位置,下载镜像镜像名为ubuntu-20.04.6-desktop-amd64.iso 也可点击下面链接直接下载:https://releases.ubuntu.com/20.04.6/ubuntu-20.04.6-des

Ubuntu20.04离线安装Docker
1.下载3个docker离线安装包,下载网址: https://download.docker.com/linux/ubuntu/dists/xenial/pool/stable/amd64/ 2.把3个离线安装包拷贝到ubuntu本地执行以下命令 sudo dpkg -i containerd.io_1.4.6-1_amd64.deb sudo dpkg -i docker-ce-c
vmware虚拟机安装ubuntu20.04
1.下载Ubuntu 20.04的ISO镜像 Index of /ubuntu-releases/ 2.安装VMware 3.创建新的虚拟机:打开VMware,选择“创建新的虚拟机”或通过文件菜单新建虚拟机。 4.选择典型,然点点击下一步: 5.选择稍后安装操作系统: 6.选择Linux 选择版本为Ubuntu64位,然后点下一步: 7.虚拟机名称随便取,然后选择需要
ubuntu20.04设置共享文件夹
ubuntu20.04设置共享文件夹 一,简介二,操作步骤1,设置Windows下的共享目录2,挂载共享文件夹3,测试是否挂载成功 一,简介 使用samba设置共享文件夹失败(权限问题),故使用另外一种方法设置共享文件夹。供参考。 二,操作步骤 1,设置Windows下的共享目录 首先关闭Ubuntu虚拟机: VMware菜单栏:虚拟机->设置->选项: 选择Wi
Linux系统ubuntu20.04 无人机PX4 开发环境搭建(失败率很低)
Linux系统ubuntu20.04 无人机PX4 开发环境搭建 PX4固件下载开发环境搭建MAVROS安装安装地面站QGC PX4固件下载 PX4的源码处于GitHub,因为众所周知的原因git clone经常失败,此处从Gitee获取PX4源码和依赖模块。 git clone https://gitee.com/voima/PX4-Autopilot.git 正克隆到
Ubuntu20.04以上 如何清理内存遇到报错如何处理[WARN]Free memory 1234(M)may be NOT ENOUGH
原因 今天遇到一位粉丝像我提出了一个问题,给了我一张截图,上面的报错内容是 [WARN]Free memory 1234(M)may be NOT ENOUGH for webase[WARN]Recommend webase with 2G memory at least.[WARN]Free memory 1234(M)may be NoT ENoUGH for node cou
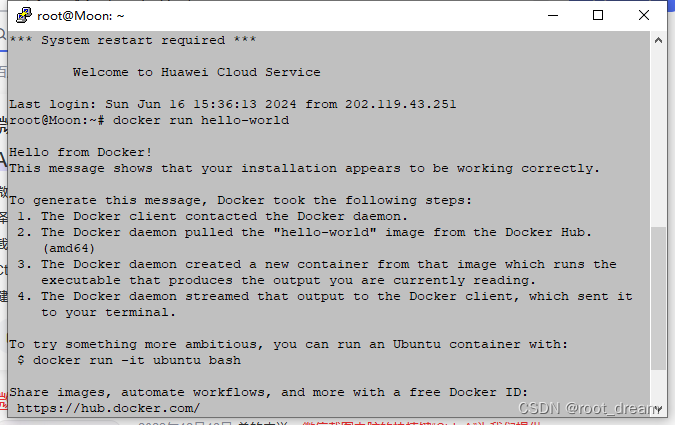
华为云下Ubuntu20.04中Docker的部署
我想用Docker拉取splash,Docker目前已经无法使用(镜像都在国外)。这导致了 docker pull 命令的失败,原因是timeout。所以我们有必要将docker的源设置在国内,直接用国内的镜像。 1.在华为云下的Ubuntu20.04因为源的原因,导致下载的docker总是拉取不了镜像,因此第一步,更换整个系统的仓库。这个动作比较危险,我建议首先备份仓库源。 以下操作全是以roo

Ubuntu20.04环境下Baxter机器人开发环境搭建
Ubuntu20.04环境下Baxter机器人开发环境搭建 ubuntu20.04安装 略 安装ROS 略 Baxter机器人依赖安装 主目录创建工作空间,按以下步骤执行 mkdir -p ~/baxter_ws/src source /opt/ros/noetic/setup.bash cd ~/baxter_ws catkin_make catkin_make ins
【Ubuntu20.04】安装XRDP远程桌面服务
【Ubuntu20.04】安装XRDP远程桌面服务 安装xrdp sudo apt install xrdpsudo adduser xrdp ssl-certsudo systemctl restart xrdp 黑屏解决 修改startwm.sh文件 sudo gedit /etc/xrdp/startwm.sh 在test -x /etc/X11/Xsession上一行添

ubuntu20.04桌面蓝屏问题解决
前些天做仿真项目,遇到了ubuntu蓝屏问题,于是想着找几个参考办法修复,但不管用,疑似是重要组件损坏。 损坏的原因是强制关机,但究竟是强制关了哪一个卡死的进程,不得而知,我有一个关不掉的仿真界面和误触ubuntu系统补丁更新。怀疑是后者的问题(所以最好不要更新啊喂…) 参考了sudo apt-get install xserver-xorg-lts-utopic,不管用,进入ubuntu20

Ubuntu20.04配置ORBSLAM2并在kitti数据集序列进行实验
一、ORB-SLAM2 安装和编译 1.ORB-SLAM2下载 用以下命令在终端上下载 git clone https://github.com/raulmur/ORB_SLAM2 2.安装Pangolin 在下载了ZIP压缩包后解压缩放在ubantu的/home下(此处只要是英文路径都可以),但别急着安装Pangolin我们还需要安装一些必要的库 sudo apt install l
测试记录4:在windows wsl2上配置ubuntu20.04
1.下载ubuntu20.04 (1) 在microsoft store中下载ubuntu20.04 (2) 在powershell中检查ubuntu20.04 wsl --list wsl -l -v 安装成功 2.安装界面 见测试记录3 3.安装必要的功能包 sudo apt install zipsudo apt install gedit出现问题: Comm
wsl子系统ubuntu20.04 设置docker服务开机自启动
docker在重要性毋庸置疑。掌握虚拟化必备工具。大家个人都会有台式机,那么windows的wsl子系统ubuntu应该都会开启来熟悉linux分布式开发。docker是客服OS限制的有利工具。那就开始准备docker环境吧。 docker安装 docker安装前建议apt-get源换国内源。这个题目太多了。自己百度下。 组件安装 sudo apt-get updatesudo apt-
【ORB_SLAM系列4】—— 一文搞定如何在Ubuntu20.04中安装运行ORB_SLAM3(包含ROS版本和非ROS版本)
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一、ORB_SLAM源码下载1.源码下载 二、安装支持C++特性依赖三、安装Pangolin1. 安装Pangolin的依赖2. 下载编译 四、安装Opencv五、安装Eigen3六、DBoW2 and g2o七、安装boost库八、非ROS部分的源码编译和安装1. 编译之前先修改代码2. 编译源码 九、
ubuntu20.04 java 开发环境搭建及 JNI 使用
java开发环境搭建及JNI使用 本文采用知识共享署名 4.0 国际许可协议进行许可,转载时请注明原文链接,图片在使用时请保留全部内容,可适当缩放并在引用处附上图片所在的文章链接。 1. VSCODE 插件2. ubuntu20.04安装Java3. java 编译4. JNI 4.1. JAVA调用C++4.2. 生成 头文件 com_huhu_test_JNIDemo4.3. 实
Ubuntu20.04配置qwen0.5B记录
环境简介 Ubuntu20.04、 NVIDIA-SMI 545.29.06、 Cuda 11.4、 python3.10、 pytorch1.11.0 开始搭建 python环境设置 创建虚拟环境 conda create --name qewn python==3.10 预安装modelscope和transformers pip install modelscopepip
Ubuntu20.04-SLAM软件安装
目录 安装环境安装问题1.Ubuntu20.04在T440p上的安装问题1.1 安装后提示"x86/cpu:VMX(outside TXT) disabled by BIOS"1.2 ACPI Error:Needed type[Reference],found [Integer] 等错误1.3 ima: Error Communicating to TPM chip 2.中文输入法-goo